1 1
Изобретение относится к подъемно- транспортному маииностроению и может быть использовано в тормозных устройствах шахтных подъемных машин с пружинно-гидравлическим приводом.
Цель изобретения - повьшение надежности гидропривода.
На фиг. 1 изображена схема гидропривода тормоза подъемной машины; на фиг. 2 - электрическая схема управления рабочим тормозом.
Гидропривод тормоза подъемной машины содержит тормозные гидроцилиндры 1, .подключенные к устройству 2 предохранительного торможения, на сливной линии 3 которого установлены клапаны Д замедленного торможения, состоящие из клапана 5, регулируемого 6 и нерегулируемого 7 дросселей, датчик 8 направления движения и остановки подъемной машины, представляющий собой кинематически связанньй с валом подъемной машины насос 9 с параллельно подключенным обратным клапаном 10, мановакуумметр 11, регулятор 12 давления и источник 13 давления рабочей жидкости, состоящий из маслонасосов 14, фильтров 15, обратных 16, предохранительного 17 клапанов. Регулятор 12 давления и устройство 2 предохранительного торможения состоят соответственно из распределителей 18 и 19, управляемых электромеханическими преобразователями 20 и 21 с элементами типа сопло-заслонка. Для питания полости 22 управления трехпозиционного распределителя 18 через электромеханический преобразователь 20 регулятора 12 давления от напорной линии 23 установлены дроссель 24 и фильтр 25, а от датчика направления движения и остановки подъемной машины - обратньй клапан 26 и дроссель 27. Вход электромеханического преобразователя 20 сообщен с напорной линией 23 через фильтр 25 и дроссель 24, а один из его выходов - с полостью 22 управления .
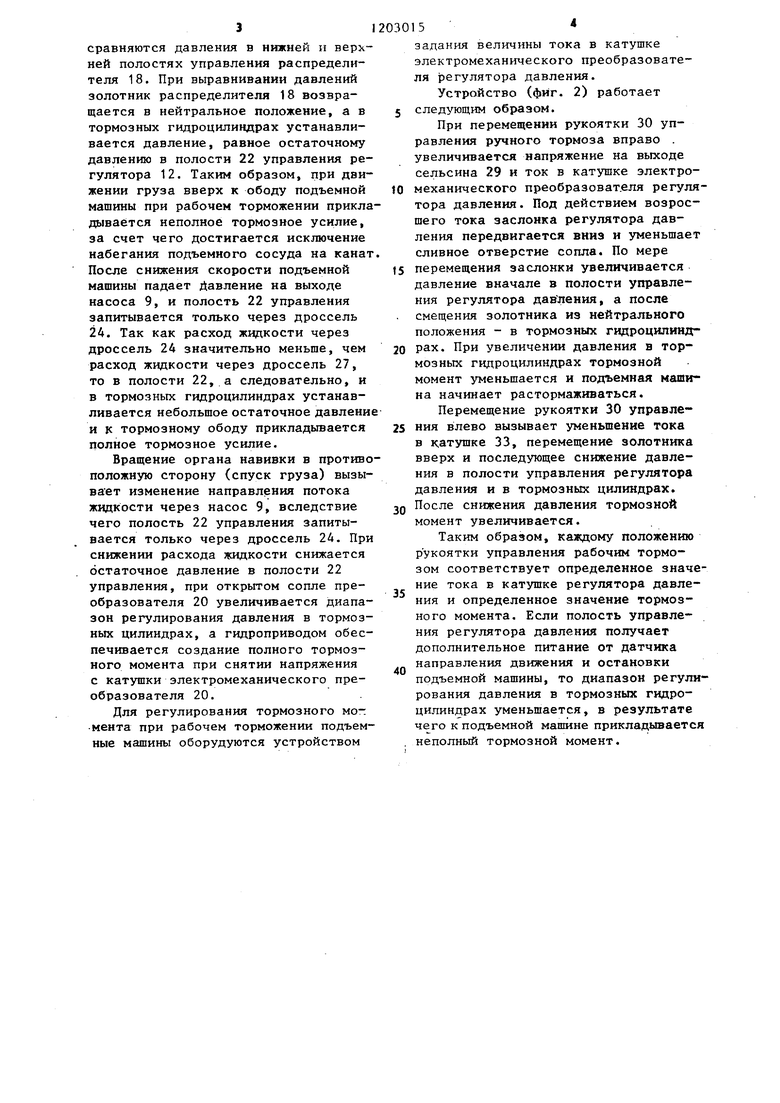
Электрическая схема управления рабочим тормозом (фиг. 2) содержит тормозной командоаппарат 28, состоящий из сельсина 29 и рукоятки 30 управления рабочим тормозом, выпрямитель 31, сопротивление 32, катущку 1 3 электромеханического преобразователя регулятора давления и реле 34 контроля исправности цепи питания.
to
45
20
25
2030152
Гидропривод работает следующим образом.
При включении двигателя насоса 14 жидкость под давлением поступает в напорную линию 23 и к преобразователям 20 и 21 регулятора 12 давления и устройства 2 предохранительного торможения. После подачи напряжения в обмотку электромеханического преобразователя 21 распределитель 19 передвигается в верхнее положение и соединяет регулятор 12 давления с тормозным гидроцилиндром 1, создавая тем самым возможность растор- маживания подъемной машины. Для последующего растормаживания подъемной машины на катушку электромеханического преобразователя 20 подается напряжение, под действием которого его заслонка перекрывает сопло, и в полости 22 управления устанавлива-. ется давление, равное давлению в напорной линии 23 Повышение давления в полости 22 управления вызывает смещение трехпозиционного распределителя 18 вниз и соединение напорной линии 28 с устройством предохранительного торможенгта и тормозными гидроцилиндрами 1. По мере расторможения подъемной машины увеличивается давление в нижней полости управ- neHi-w распределителя 18, и последний возвращается в нейтральное положение..
В течение всего периода подъема груза насос 9 датчика направления движения и остановки подъемной машины подает жидкость под давлением в сливную линию 3 устройства 2 предохранительного торможения и через об- i ратный клапан 26 и дроссель 27 - в полость 22 управления регулятора 12 давления. При затормаживании подъемной машины рабочим тормозом путем снятия напряжения с катушки преобразователя 20 заслонка преобразователя открывает сопло, и в полости 22 управления давление уменьшается на величину, зависящую от соотношения диаметров сопла и дросселей к перепада давления на дросселях. Под действием разностей давлений в верхней и нижней полостях золотник распределителя 18 передвигается вверх и соединяет тормозные гидро- 55 цилиндры 1 через устройство предохранительного торможения со сливом. Жидкость из тормозных гидроцилиндров выпускается до тех пор, пока не
30
35
45
50
3
сравняются давления в нижней н верхней полостях управления распределителя 18. При выравнивании давлений золотник распределителя 18 возвращается в нейтральное положение, а в тормозных гидроцилиндрах устанавливается давление, равное остаточному давлению в полости 22 управления регулятора 12. Таким образом, при движении груза вверх к ободу подъемной машины при рабочем торможении прикладывается неполное тормозное усилие, за счет чего достигается исключение набегания подъемного сосуда на канат После снижения скорости подъемной машины падает Давление на выходе насоса 9, и полость 22 управления запитывается толъко через дроссель 24. Так как расход жидкости через дроссель 24 значительно меньше, чем расход жидкости через дроссель 27, то в полости 22, а следовательно, и в тормозных гидроцилиндрах устанавливается небольшое остаточное давлени и к тормозному ободу прикладывается полное тормозное усилие.
Вращение органа навивки в противоположную сторону (спуск груза) вызы- ва ет изменение направления потока жидкости через насос 9, вследствие чего полость 22 управления запитывается только через дроссель 24. При снижении расхода жидкости снижается остаточное давление в полости 22 управления, при открытом сопле преобразователя 20 увеличивается диапазон регулирования давления в тормозных цилиндрах, а гидроприводом обеспечивается создание полного тормозного момента при снятии напряжения с катушки электромеханического преобразователя 20.
Для регулирования тормозного мо- мента при рабочем торможении подъемные машины оборудуются устройством
03015
задания величины тока в катушке электромеханического преобразователя регулятора давления.
Устройство (фиг. 2) работает
5 следующим образом.
При перемещении рукоятки 30 управления ручного тормоза вправо . увеличивается напряжение на выходе сельсина 29 и ток в катушке электро10 механического преобразователя регулятора давления. Под действием возросшего тока заслонка регулятора давления передвигается вниз и уменьшает сливное отверстие сопла. По мере
15 перемещения заслонки увеличивается давление вначале в полости управления регулятора дав ления, а после . смещения золотника из нейтрального положения - в тормозных гидроцилинд20 рах. При увеличении давления в тормозных гидроцилиндрах тормозной момент уменьшается и подъемная машина начинает растормаживаться.
Перемещение рукоятки 30 управле25 ния влево вызывает уменьшение тока в к,атушке 33, перемещение золотника вверх и последующее снижение давления в полости управления регулятора давления и в тормозных цилиндрах.
30 После снижения давления тормозной момент увеличивается.
Таким образом, каждому положению рукоятки управления рабочим тормозом соответствует определенное значение тока в катушке регулятора давления и определенное значение тормозного момента. Если полость управления регулятора давления получает дополнительное питание от датчика направления движения и остановки подъемной машины, то диапазон регулирования давления в тормозных гидроцилиндрах уменьшается, в результате чего к подъемной машине прикладывается неполный тормозной момент.
35
40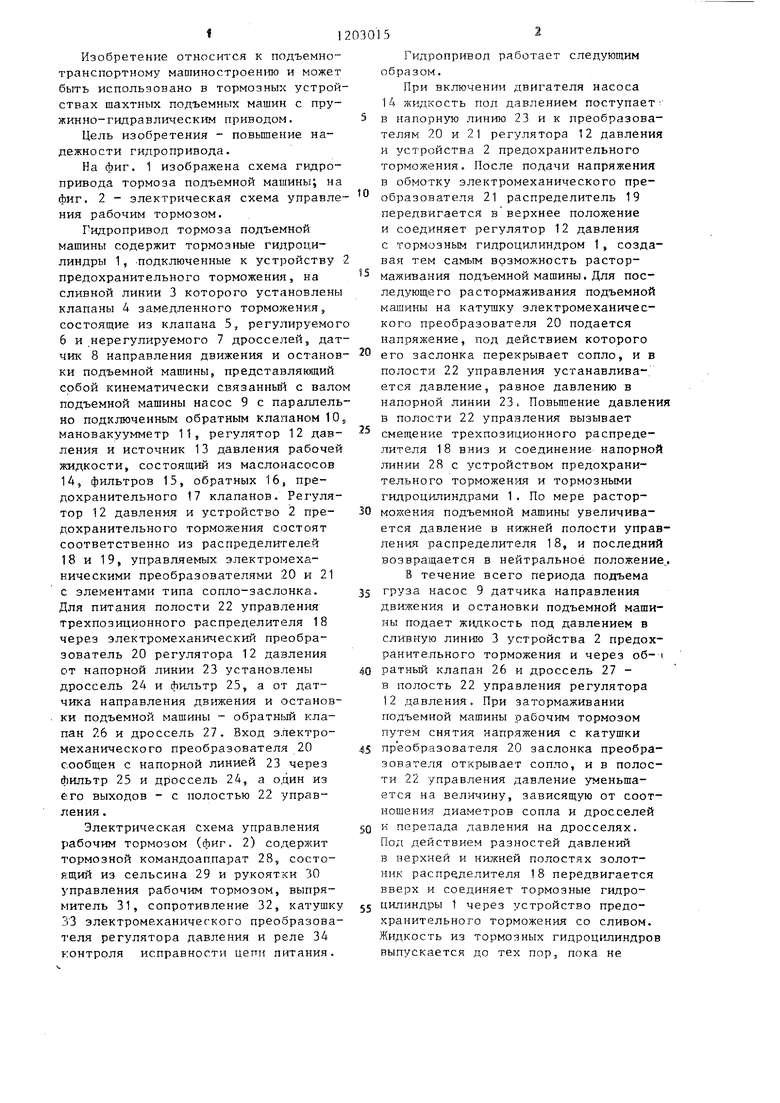
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод тормоза подъемной машины | 1984 |
|
SU1230980A1 |
| Система управления пружинно-гидравлическим приводом тормоза шахтных подъемных машин | 1979 |
|
SU787327A1 |
| Регулятор для предохранительного тормоза | 1990 |
|
SU1720978A1 |
| Регулятор предохранительного тормоза | 1989 |
|
SU1652298A1 |
| Тормоз подъемной машины | 1986 |
|
SU1409583A1 |
| Система управления тормозом шахтной подъемной машины | 1978 |
|
SU747806A1 |
| Тормоз подъемной машины | 1988 |
|
SU1516459A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Электропневматический регулятор давления | 1986 |
|
SU1332277A1 |
| Система управления пружинно-гидравлическимпРиВОдОМ ТОРМОзА шАХТНОй пОд'ЕМНОй МАшиНы | 1978 |
|
SU800122A1 |
Редактор Т. Кугрьниева
Фи.2
Составитель 0. Кузьмина
Техрел О.Ващмшииа Корректор Л. Натай
Заказ 8377/26
Тираж 803
ВНРЭДПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб. , д. 4/5
Филиал ПШ Патент, г. Ужгород, ул. Проектная, 4
Подписное
| Гидропривод тормоза шахтной подъемной машины | 1982 |
|
SU1027136A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
