Изобретение .относится к сельскохозяйственному машиностроению, а именно к механизмам для самопередвижения зерноочистительных, зернопогрузочных машин, протравливателей и т.д.
Целью изобретения является упрощение конструкции механизма самопередвижения и упрощение управления путем автоматизации.
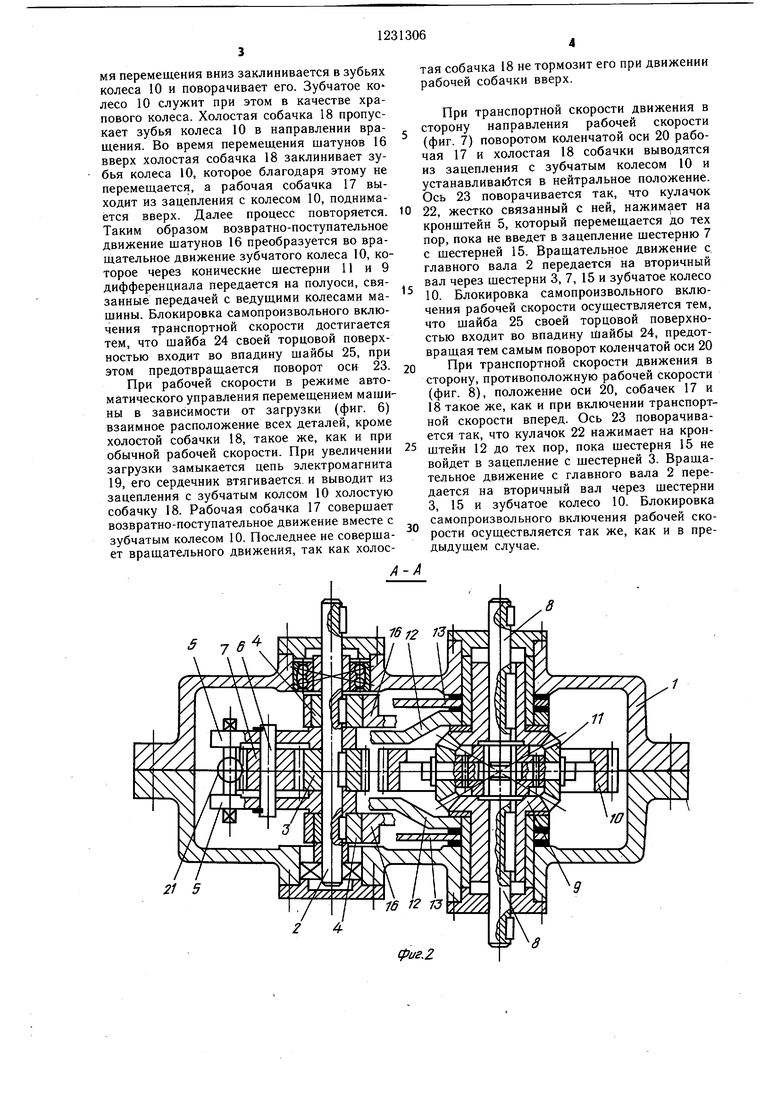
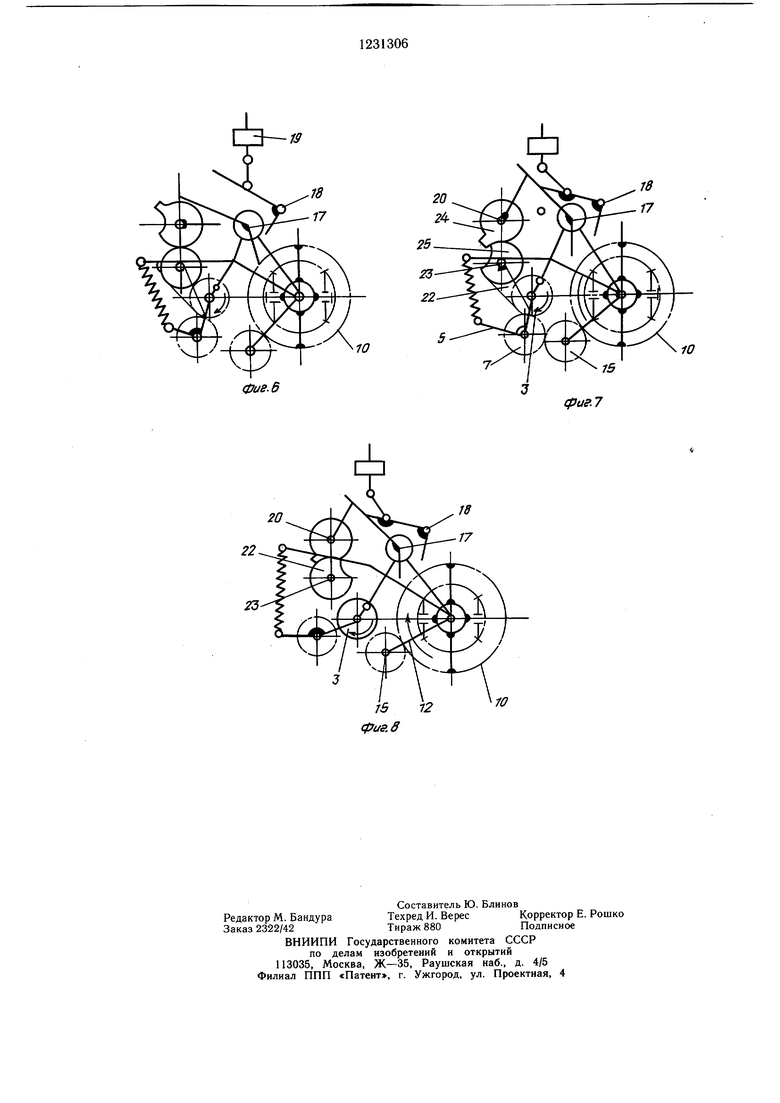
На фиг. 1 изображен механизм самопередвижения, вид сбоку, разрез; на фиг. 2 - то же, вид сверху, разрез А-А на фиг. 1; на фиг. 3 - то же, вид в аксонометрии; на фиг. 4 - 8 - схемы взаимного расположения элементов, а именно: на фиг. 4 - в нейтральном положении; на фиг. 5 - при рабочей скорости; на фиг. 6 - при рабочей скорости в режиме автоматического управления перемещением машины в зависимости от загрузки; на фиг. 7 - при транспортной скорости движения в сторону направления рабочей скорости; на фиг. 8 - при транспортной скорости движения в сторону, противоположную направлению рабочей скорости.
Механизм самопередвижения (фиг. 1-3) размещен в корпусе 1, выполненном в виде двух полукорпусов, содержит главный вал 2, на котором жестко закреплены ведущая шестерня 3, два эксцентрика 4 и установлены на подшипниках скольжения два кронштейна 5. Кронштейны 5 соединены осью 6, на которой свободно посажена шестерня 7 реверсивного включения транспортной скорости. Шестерни 3 и 7 постоянно находятся в зацеплении, а кронштейны 5 имеют возможность поворачиваться относительно главного вала 2, при этом шестерня 7 обкатывается относительно шестерни 3. Главный вал 2 установлен на подшипниках качения в корпусе 1. Вторичный вал образован двумя полуосями 8, на которых жестко установлены две конические шестерни 9 дифференциала и свободно установлено зубчатое колесо 10. Ступица колеса 10 выполнена в виде крестовины, на свободных концах которой установлены на подшипниках скольжения два сателлита 11 дифференциала.
На ступицах шестерен 9 шарнирно установлены по два кронштейна 12 и 13. В нижней части кронштейны 12 соединены осью 14, на которой шарнирно установлена шестерня 15 включения транспортной скорости, которая постоянно находится в зацеплении с зубчатым колесом 10 и может обкатываться вокруг него при повороте кронштейна 12. Кронштейны 13 соединены осью между собой и с двумя шатунами 16, установленными шарнирно на эксцентриках 4. На этой же оси установлена рабочая собачка 17. Вторичный вал установлен на подшипниках скольжения в корпусе 1. В верхней части корпуса 1 установлена ось, на которой посажена холостая собачка 18. Рабочая 17 и холостая собачки взаимодействуют между собой через жестко связанные с ними рычаги. Рычаг холостой собачки расположен над рычагом рабочей собачки и тягой связан с сердечником электромагнита
19, установленного на крышке корпуса 1. Рычаг рабочей собачки 17 расположен над коленчатой осью 20, установленной щарнир- но в корпусе 1. Кронштейны 5 и 12 связаны между собой пружиной 21 и разжимаются кулачком 22, жестко связанным с
осью 23, которая шарнирно установлена в корпусе 1.
Взаимное расположение осей 20 и 23, определяющее рабочую или транспортную скорости механизма самопередвижения (тихоходный или быстроходный приводы), блокируется шайбами 24 и 25, выполненными в виде кругов с впадинами, причем радиус впадины на одной шайбе равен половине диаметра второй шайбы и наоборот, а расстояние между их центрами меньше полусуммы
0 радиусов шайб. Шайбы на осях установлены жестко.
Механизм самопередвижения работает следующим образом.
Перемещение машины, на которой устанавливается механизм, может осуществляться на рабочей скорости вперед (крутящий момент вторичному валу передается храповым механизмом, включающим два эксцентрика, два шатуна, рабочую и холостую собачки) и на транспортной скорости вперед
Q и назад (крутящий момент вторичному валу передается через зубчатую цилиндрическую передачу).
В нейтральном положении (фиг. 4) крутящий момент от главного вала 2 на вторичный не передается. Шестерни 3 и 7 враща2 ются вхолостую, а колесо 10 и шестерня 15 неподвижны. Рабочая собачка 17 через свой рычаг поворотом коленчатой оси 20 выведена из зацепления с зубчатым колесом 10, воздействием на рычаг холостой собачки 18 она также выведена собачкой 17 из зацепле0 ния с колесом 10. Вращательное движение эксцентриков 4 преобразуется в возвратно- поступательное движение шатунов 16 и рабочей собачки 17, ось которой также совер- щает возвратно-поступательное движение по круговой траектории относительно колеса 10
через кронштейны 13. Блокировочные шайбы 24 и 25 расположены так, что их впадины находятся друг против друга.
При рабочей скорости (фиг. 5) взаимное расположение кронштейнов 5 и 12, оси
Q 23 с кулачком 22, а также щестерен 3, 7, 15 и колеса 10 соответствует нейтральному положению. Поворотом коленчатой оси 20 рабочая собачка 17 и холостая 18 введены в зацепление с зубчатым колесом 10. Рабочая собачка, ось которой участвует в
5 возвратно-поступательном движении под воздействием шатунов 16 и во вращательном движении относительно зубчатого колеса 10 под воздействием кронщтейна 13, во время перемещения вниз заклинивается в зубьях колеса 10 и поворачивает его. Зубчатое ко лесо 10 служит при этом в качестве храпового колеса. Холостая собачка 18 пропускает зубья колеса 10 в направлении вращения. Во время перемещения шатунов 16 вверх холостая собачка 18 заклинивает зубья колеса 10, которое благодаря этому не перемещается, а рабочая собачка 17 выходит из зацепления с колесом 10, поднимается вверх. Далее процесс повторяется. Таким образом возвратно-поступательное движение шатунов 16 преобразуется во вращательное движение зубчатого колеса 10, которое через конические шестерни 11 и 9 дифференциала передается на полуоси, связанные передачей с ведущими колесами машины. Блокировка самопроизвольного включения транспортной скорости достигается тем, что шайба 24 своей торцовой поверхностью входит во впадину шайбы 25, при этом предотвращается поворот оси 23. При рабочей скорости в режиме автоматического управления перемещением машины в зависимости от загрузки (фиг. 6) взаимное расположение всех деталей, кроме холостой собачки 18, такое же, как и при обычной рабочей скорости. При увеличении загрузки замыкается цепь электромагнита 19, его сердечник втягивается, и выводит из зацепления с зубчатым колсом 10 холостую собачку 18. Рабочая собачка 17 совершает возвратно-поступательное движение вместе с зубчатым колесом 10. Последнее не соверща- ет вращательного движения, так как холос
тая собачка 18 не тормозит его при движении рабочей собачки вверх.
При транспортной скорости движения в сторону направления рабочей скорости (фиг. 7) поворотом коленчатой оси 20 рабочая 17 и холостая 18 собачки выводятся из зацепления с зубчатым колесом 10 и устанавливакЗтся в нейтральное положение. Ось 23 поворачивается так, что кулачок
22, жестко связанный с ней, нажимает на кронщтейн 5, который перемещается до тех пор, пока не введет в зацепление шестерню 7 с шестерней 15. Вращательное движение с главного вала 2 передается на вторичный вал через шестерни 3, 7, 15 и зубчатое колесо 10. Блокировка самопроизвольного включения рабочей скорости осуществляется тем, что шайба 25 своей торцовой поверхностью входит во впадину шайбы 24, предотвращая тем самым поворот коленчатой оси 20 При транспортной скорости движения в сторону, противоположную рабочей скорости (фиг. 8), положение оси 20, собачек 17 и 18 такое же, как и при включении транспортной скорости вперед. Ось 23 поворачивается так, что кулачок 22 нажимает на крон5 штейн 12 до тех пор, пока шестерня 15 не войдет в зацепление с щестерней 3. Вращательное движение с главного вала 2 передается на вторичный вал через щестерни 3, 15 и зубчатое колесо 10. Блокировка самопроизвольного включения рабочей скорости осуществляется так же, как и в предыдущем случае.
0
2
. т
12
12
20
26 6 5 3 2
П
Т5
70
фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИСПОСОБЛЕНИЕ ДЛЯ ВОРОШЕНИЯ ФРЕЗЕРНОГО ТОРФА | 1932 |
|
SU30997A1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2004 |
|
RU2280771C2 |
| КРЕЙЦКОПФНЫЙ УЗЕЛ | 1992 |
|
RU2042865C1 |
| Качающийся питатель | 1981 |
|
SU1008108A1 |
| СТАНОК ДЛЯ НАРЕЗКИ ДЕЛЕНИЙ НА ШКАЛАХ ВЕСОВ | 1926 |
|
SU5638A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ УКОЛОВА | 2005 |
|
RU2296234C1 |
| Аксиально-поршневой двигатель | 1989 |
|
SU1740699A1 |
| Приспособление для сообщения возвратно-вращательных движений шпинделям в станках для притирки клапанов | 1935 |
|
SU46162A1 |
| МНОГОШПИНДЕЛЬНЫЙ СТАНОК ДЛЯ ОДНОВРЕМЕННОЙ ПРИТИРКИ КЛАПАНОВ И ПОРШНЕВЫХ КОЛЕЦ | 1928 |
|
SU18115A1 |


18
13
13
1О
3 /
ериг.В
19
2д
18
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Техническое описание, инструкция по эксплуатации и паспорт | |||
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
