Изобретение относится к области станкостроения и может быть использовано при закреплении деталей Вуцентрах с базированием по торцу на станка токарного типа как с левым, так и с правым вращением шпинделя при автоматизированном цикле обработки с применением промышленных роботов.
Целью изобретения является повышение надежности в работе путем исключения возможности заклинивания поворотных кулачков при разжиме.
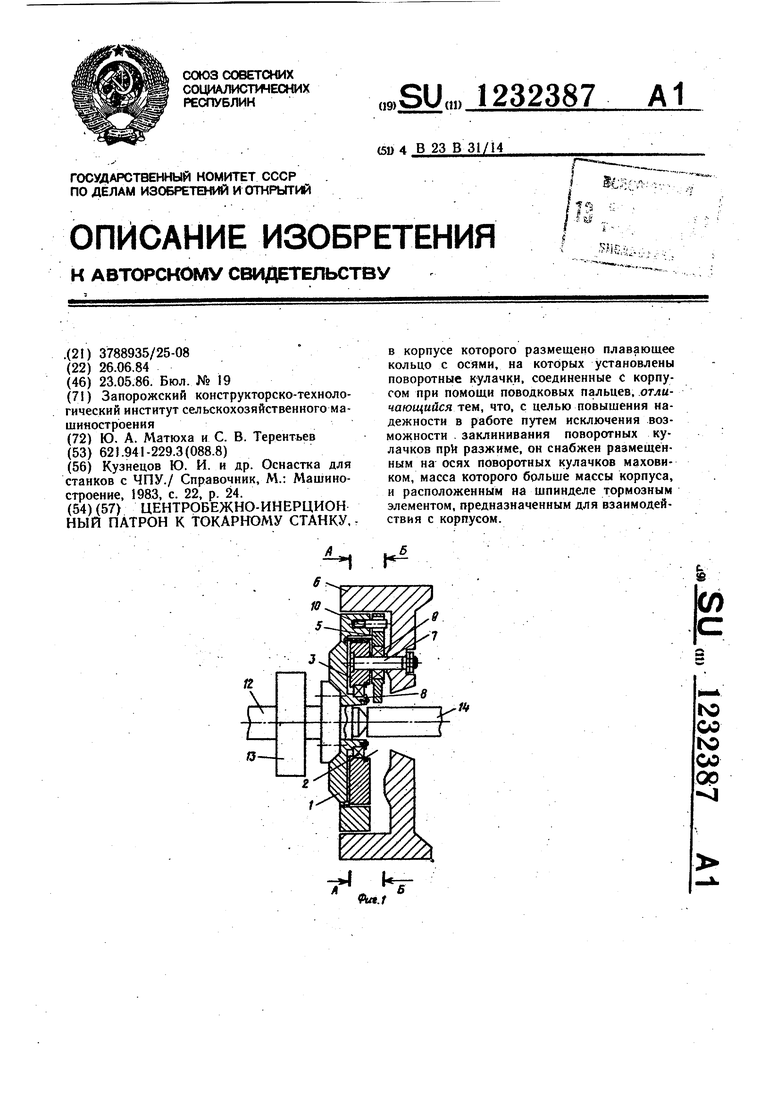
На фиг.1 изображен предлагаемый цент- робежно-инерционный патрон, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1.
II кулачков 5. На шпинделе 12 установлена тормозная муфта 13.
Автоматический центробежно-инерционный патрон работает следующим образом.
Левое вращение патрона. В начальный
момент пуска шпинделя 13 (не показано) предварительный зажим осуществляется поводковыми пальцами 10, затем центробежные силы сводят поворотные кулачки 5 и зажимают деталь 14, одновременно растягивается
10 пружина 4. При обработке усилия резания автоматически увеличивается сила крепления детали 14.
, В момент резкого торможения шпинделя 12 и корпуса 1 при помощи тормозной муфты 13 к моменту, создаваемому В корпусе 1 патрона на подшипнике 2 5 силой упругости пружины 4, стремящемуся находится плавающее кольцо 3, подпружи-провернуть плавающее кольцо 3 по ходу
ненное пружиной 4. Сквозь плавающеевращения патрона относительно затормокольцо 3, поворотные кулачки 5 и маховикженного корпуса 1 патрона и развести по6 проходит ось 7. На корпусе 1 подшипгворотные кулачки 5, добавляется кинематиник 2 удерживается фланцем 8. Кулачки 5 ческий момент вращак)щихся масс, плаваю щего кольца 3, поворотных кулачков 5 и
маховика 6 (равный произведению общего момента инерции плавающего кольца 3, поворотных кулачков 5, маховика 6 на их угловую скорость) относительно притормажиустановлёны на осях 7 посредством подшипников 9 качения.
Взаимосвязь корпуса 1 с поворотными кулачками 5 осуществляется поводковыми
пальцами 10, представляющими собой шпиль- 25 вающего корпуса I и зажатой детали 14. ки, одним концом ввернутые в корпусе 1, В результате поворотные кулачки 5 автома- а другим находящиеся в овальных прорезях тячески разжимают деталь И.
II кулачков 5. На шпинделе 12 установлена тормозная муфта 13.
Автоматический центробежно-инерционный патрон работает следующим образом.
Левое вращение патрона. В начальный
момент пуска шпинделя 13 (не показано) предварительный зажим осуществляется поводковыми пальцами 10, затем центробежные силы сводят поворотные кулачки 5 и зажимают деталь 14, одновременно растягивается
пружина 4. При обработке усилия резания автоматически увеличивается сила крепления детали 14.
, В момент резкого торможения шпинделя 12 и корпуса 1 при помощи торА-А
fus.2
6-5
//
Фиг.:5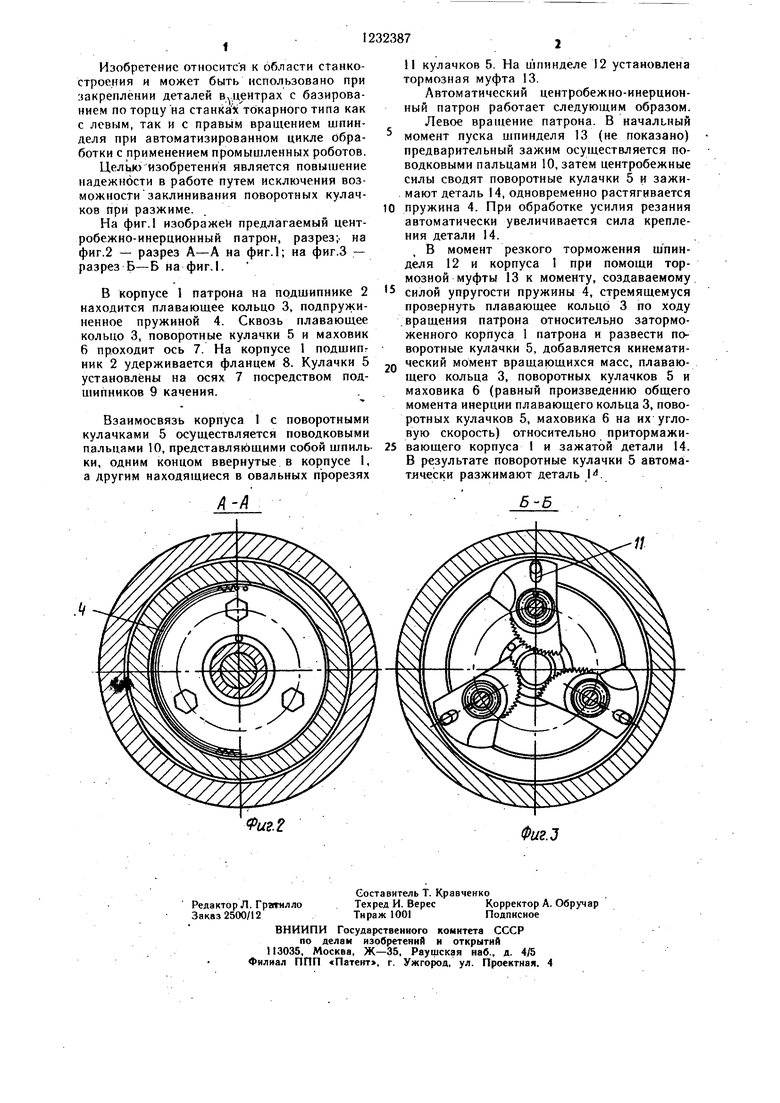
| название | год | авторы | номер документа |
|---|---|---|---|
| Металлорежущий станок | 1974 |
|
SU519315A1 |
| Поводковый самозажимной двухкулачковый патрон | 1983 |
|
SU1144797A1 |
| Автоматический поводковый патрон | 1979 |
|
SU829349A2 |
| Автоматический поводковый патрон | 1980 |
|
SU956169A1 |
| Поводковый патрон | 1976 |
|
SU701741A1 |
| Патрон для крепления цилиндрических деталей | 1981 |
|
SU1024173A1 |
| Поводковый токарный патрон | 1958 |
|
SU117014A1 |
| Двухкулачковый поворотный самоцентрирующий патрон | 1982 |
|
SU1013123A1 |
| Поводковый патрон | 1983 |
|
SU1110556A1 |
| Автоматический поводковый патрон | 1982 |
|
SU1060335A1 |
Составитель Т. Кравченко
Редактор Л. Г рати л лоТехред И. ВересКорректор А. Обручар
Заказ 2500/12Тираж 1001Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретеннй и открытий
113035, Москва, Ж-35, Раушская изб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная. 4
| Кузнецов Ю | |||
| И | |||
| и др | |||
| Оснастка для станков с ЧПУ./ Справочник, Л.: Машиностроение, 1983, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
