Изобретение относится к подъемно-транспортному машиностроению, в частности к подъемникам типа «нюрнбергские ножницы.
Цель изобретения - повышение надежности.
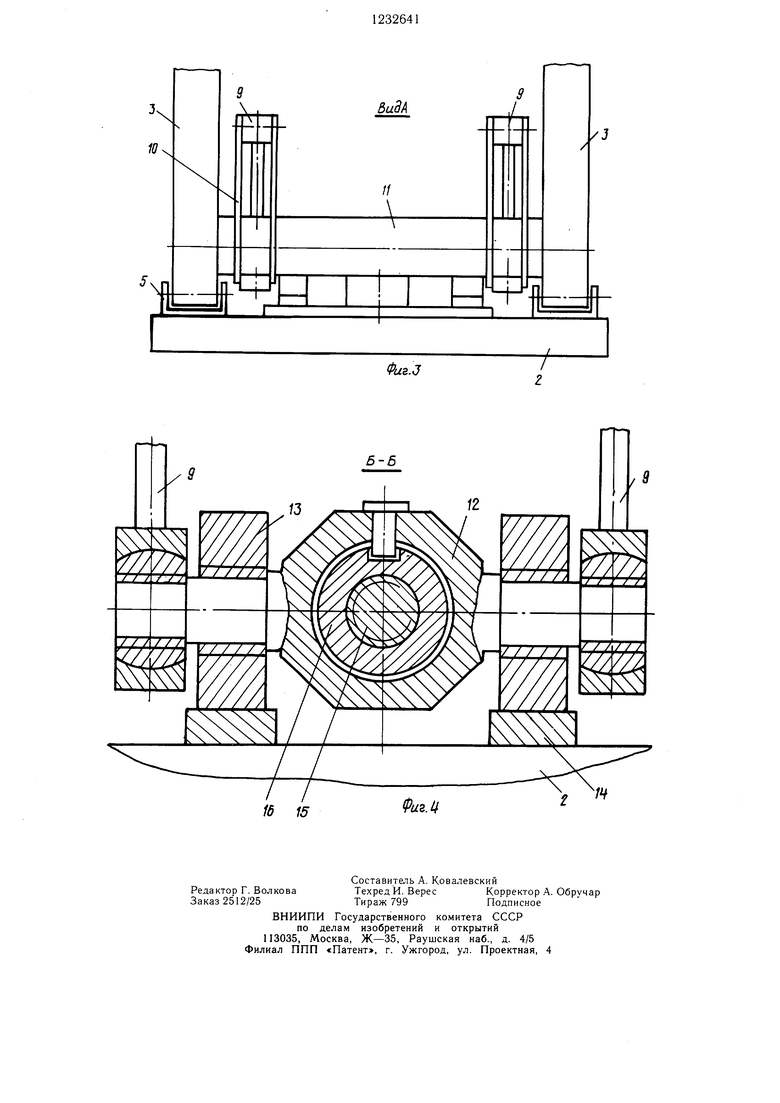
На фиг. 1 с.хематично изображен подъемник, общий вид; на фиг. 2 - то же, в нижнем положении; на фиг. 3 - вид А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 1.
Подъемник состоит из верхней грузовой платформы 1 и основания 2, которые связаны между собой двумя парами рычагов 3 типа «нюрнбергские ножницы, одни концы которых шарнирно закреплены в кронштейнах 4 и 5, а другие установлены в горизонтальных направляющих 6 и 7 соответственно грузовой платформы 1 и основания 2. На основании 2 горизонтально установлен привод 8, воздействующий на рычаги 3 через пару шатунов 9, один конец которых шарнирно закреплен в кронштейнах 10, жестко закрепленных на валу 11, связывающем нару рычагов 3, а другой шарнирно установлен на каретке 12, перемешающейся на катках 13 по направляющим 14. В свою очередь каретка 12 приво-
дится в движение приводом с через передачу винт 15 - гайка 16, а длины шатунов 9, кронщтейнов 10 и рычагов 3 выбраны таким образом, чтобы нагрузка на винт 15 была постоянной при любо.м положении платформы 1, что достигается выполнением соотношения
5 платформы
« Ь tgai 02 3F TgoT
где ui и ui - расстояния между осями рычагов соответственно в верхнем и нижнем положениях гру- зонесущей платформы; & и 62 - расстояния между осями траверсы и неподвижным концом рычага соответственно в верхнем и нижнем положениям гру- 0зонесущей платформы;
lai и «2 -угол, образованный шатуном с направлением движения траверсы, соответственно в верхнем и нижнем положениях гру- зонесущей платформы. Устройство работает следующим образом. Подъем грузовой платформы 1 осуществляется Е}ключением привода 8 и винт 15, вращаясь, перемещает гайку 16 вместе с кареткой 12 на катках 13 по нанравляю- 0 щим 14. При этом шатуны 9 через кронштейны 10, жестко закрепленные на валу 11, раздвигают рычаги 3, одни концы которых поворачиваются на осях кронштейнов 4 и 5, а другие перемещаются в направляющих 6 и 7, что обеспечивает синхронный подъем
5
платформы
Опускание грузовой платформы 1 происходит при вращении приводом В винта 15 в противоположном направлении. Гайка 16 вместе с кареткой 12 перемещается назад на катках 13 по направляющим 14, при этом шатуны 9 через кронштейны 10 сдвигают рычаги 3 и платформа 1 опускается.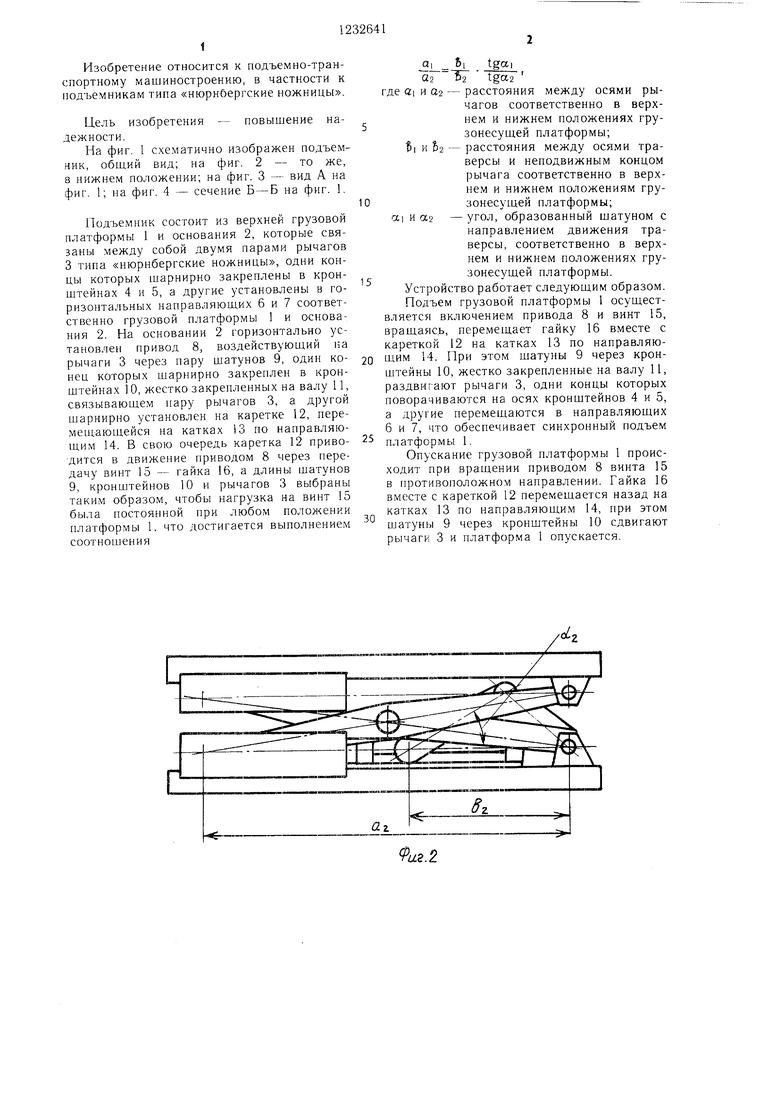
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1985 |
|
SU1276616A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| ПОДЪЕМНИК | 2003 |
|
RU2268238C2 |
| Подъемник | 1985 |
|
SU1312067A1 |
| Подъемник | 1990 |
|
SU1801941A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Канатный строительный подъемник для длинномерных грузов | 1983 |
|
SU1127833A1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2385284C1 |
| ПОДЪЕМНИК | 1993 |
|
RU2081054C1 |

ФигМ
Щ
Редактор Г. Волкова Заказ 2512/25
Составитель А. Ковалевский Техред И. ВересКорректор А. Обручар
Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Подъемник | 1978 |
|
SU751792A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
