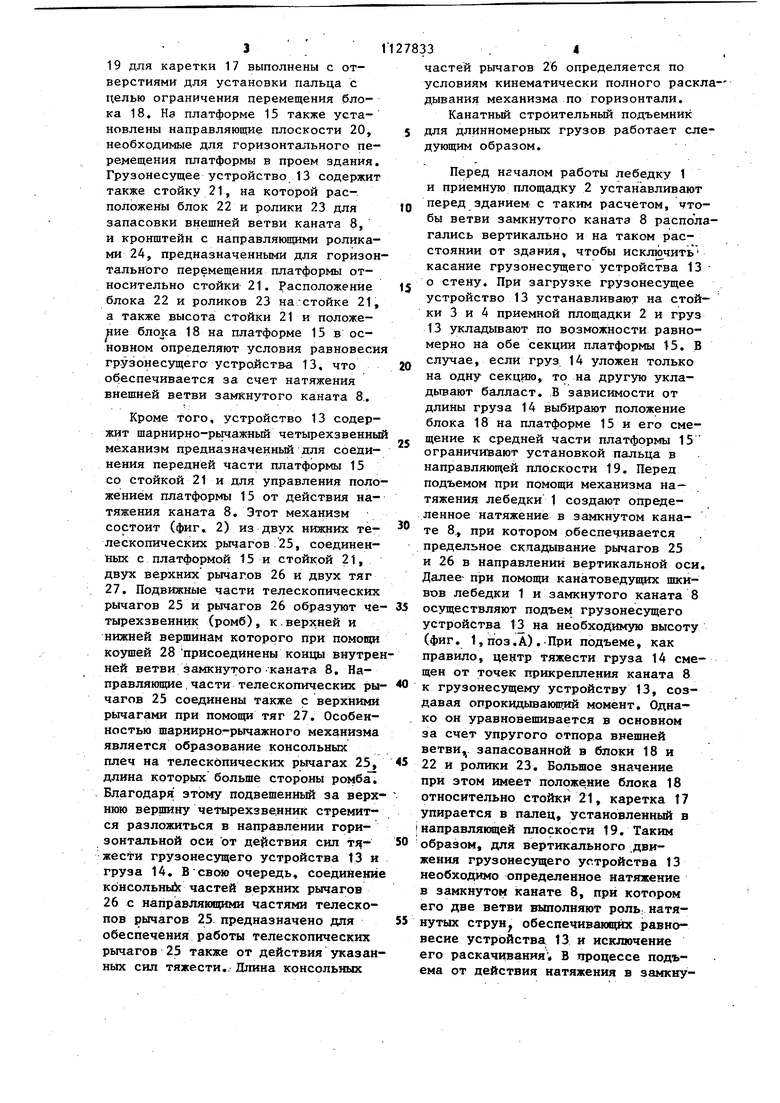
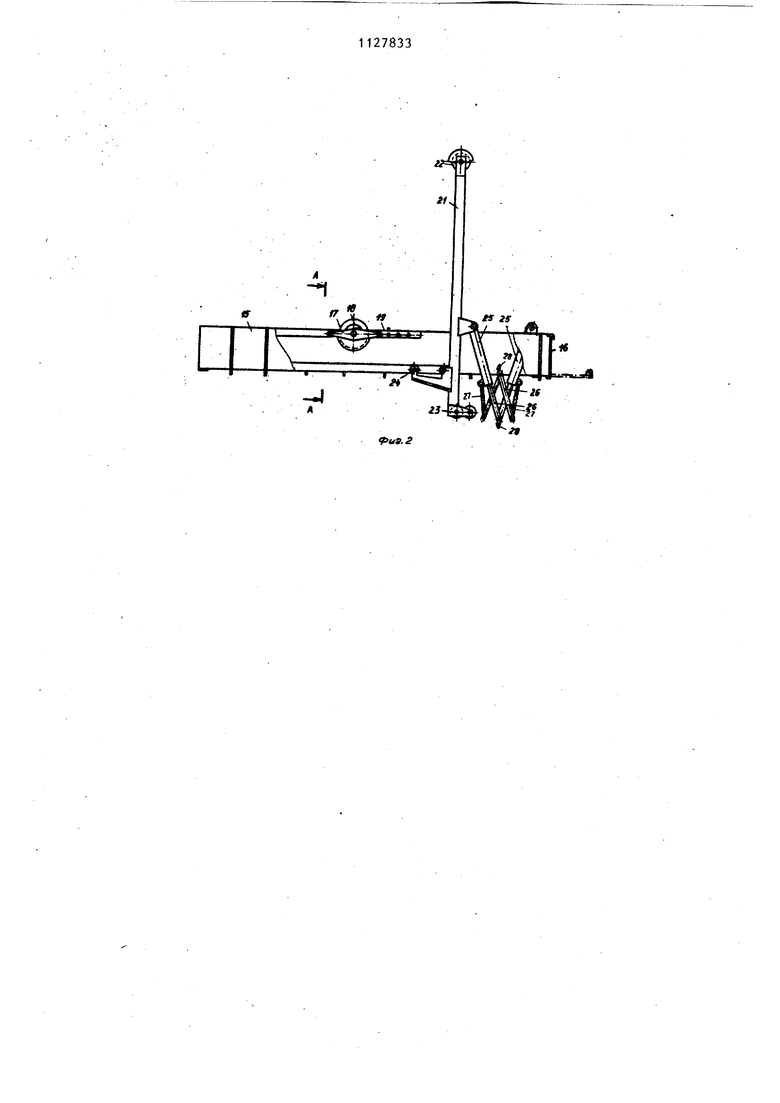
1 Изобретение относится к транспортному машиностроению, в частнос ти к канатным строительным ггодъемникам, предназначенным для подачи строительных материалов и оборудов ния в проемы зданий. Известен канатный строительный подъемник, содержащий привод, установленную на кровле опору с блоком и огибающий его контакт с. грузрнесущим элементом СО. Недостатками этого устройства являются необходимость страховки груза от раскачивания и ударов о стену здания и необходимость разворота или кантования груза для подачи его в проем здания. Наиболее близким к изобретению по технической сущности является ка натный-, строительный подъемник для длинномерных грузов, содержащий установленную на кровле опору с внешним м внутренним блоками грузо ,вую трособлочную систему с замкнутым канатом, соединенную с лебедкой и грузонесущим устройством, включающим стойку с направляющими блоками и горизонтальную грузовую . платформу, установленную с возможностью перемещения по роликам относительно стойки, которая соединена с передней частью грузовой платформ при помощи четырехзвенного шарнирно рычажного механизма C2J. Недостатками известного подъемника являются низкая безопасность эксплуатации и малая точность подач груза в проем здания. Цель изобретения - повышение безопасности эксплуатации и увеличени подани груза в проем здания. Цель достигается тем что в канатном строительном подъёмнике для длинномерных грузов, содержащем установленную на кровле опору с внешним и внутренним блоками, грузовую трособлочную систему с замкнутым к , соединенную с лебедкой и гру зонесущим устройством,, включающим стойку с направляющими блоками и горизонтальную грузовую гшатформу, установленную с возможностью перемещения относительно стойки, которая соединена с передней частью гру зовой платформы при помощи четырех- звенного шарнирно-рычажного механиз ма, грузовая платформа снабжена напрадляющим блоком и скользящей опорой, снабженной переставным ограни3чителем перемещения в направлении стойки, а звенья четырехзвенного щаонирно-рычажного механизма вьтолнены с консолями, причем консоли нижних звеньев выполнены телескопическими с направляющими, щарнирно соединенными тягами с консолями верхних рычагов, при этом внутренний блок кровельной опоры подпружинен и выполнен с возможностью перемещения на величину разности диагоналей шарнирно-рычажного четырехзвенного механизма. На фиг. 1 лзображена схема подъ- емника,. установленного на здании; на фиг. 2 - конструкция грузонесу- щего устройства, вид сбоку; на фиго 3 - конструкция грузонесущего устройства, разрез А-А на фиг. 2. Подъемник содержит Сфиг. 1) лебедку 1 для привода замкнутого каната с механизмом для его натяжения, находящуюся на определенном расстоянии от приемной площадки 2, на которой расположены жесткая опорная . стойка 3 и подпружиненная опорная стойка 4 с концевым выключателем двигателя лебедки 1,, противовесы 5 для предотвращения сдвига приемной площадки, а также направляющие блоки 6 и 7 для замкнутого каната 8. Последний огибает направляющие блоки 9 и 10, расположенные на кровельной опоре 11, снабженной противовесом 12, При этом блок 10 может перемещаться к стене здания и подпружинен. Замкнутый контакт 8 образует, две параллельные ветви по всей высоте здания, которыми он соединен с грузонесущим устройством 13, и предназначен для вертикального перемещения грузонесущего устройства 13 после создания в нем предваритель- ; ного натяжения и для горизонтального выдвижения платформы с грузом 14 в проем здания от действия сил тяжести при снижении этого натяжения, Грузонесущее устройство.13 содержит (фиг. 2 и 3) грузовую платформу 15, имеющую форму кузовз, образованного двумя соединенными между собой емкостями и снабженного передним открывающимся бортом 16. Между внутренни ш стенками платформы 15 на роликовой каретке 17, выполняющей роль скользящей опоры, расположен направляющий блок 18 для запасовки внешней ветви каната 8. При этом направляющие плоскости
19 для каретки 17 выполнены с отерстиями для установки пальца с елью ограничения перемещения блоа 18. На платформе 15 также устаовлены направляющие плоскости 20, еобходимые для горизонтального пеемещения платформы в проем здания. рузонесущее устройство 13 содержит также стойку 21, на которой расположены блок 22 и ролики 23 для запасовки внешней ветви каната 8, и кронштейн с направляющими роликами 2А, предназначенными для горизонтального перемещения платформы относительно стойки 21. Расположение блока 22 и роликов 23 на-стойке 21, а также высота стойки 21 и положе- рие блока 18 на платформе 15 в основном определяют условия равновесия грузонесущега устройства 13, что обеспечивается за счет натяжения нешней ветви замкнутого каната 8..
Кроме того, устройство 13 содержит шарнирно-рычажный четырехзвенный механизм предназначенный яля соединения передней части платформы 15 со стойкой 21 и для управления положением платформы 15 от действия натяжения каната 8. Этот механизм состоит (фиг 2) из двух нижних телескопических рычагов 25, соединенных с платформой 15 и стойкой 21, двух верхних рычагов 26 и двух тяг 27. Подвижные части телескопических рычагов 25 и рычагов 26 образуют четырехзвенник (ромб), к.верхней и нижней вершинам которого при помощи козппей 28 присоединены концы внутренней ветви замкнутого-каната 8, Направляющие /части телескопических рычагов 25 соединены также с верхними рычагами при помощи тяг 27. Особенностью шарнирно-рычажного механизма является образование консольных плеч на телескопических рычагах 25, длина которых больше стороны ромба. Благодаря этому подвешенный за верхнюю вершину четырехзве.нник стремится разложиться в направлении горизонтальной оси от действия сил т жести грузонесущего устройства 13 и груза 14. ВСВОЮ очередь, соедийение консольньй; частей верхних рычагов 26 с направляющими частями телескопов рычагов 25. предназначено для обеспечения работы телескопических рычагов 25 также от действия указанных сил тяжести., Лпина консольных
частей рычагов 26 определяется по условиям кинематически полного раскладывания механизма по горизонтали.
Канатный строительный подъемник для длинномерных грузов работает следующим образом.
Перед нгчалом работы лебедку 1 и приемную площадку 2 устанавливают
.. перед зданием с таким расчетом, чтобы ветви замкнутого каната 8 располагались вертикально и на таком расстоянии от здания, чтобы исключить касание грузонесзтщего устройства 13 о стену. При загрузке Грузонесущее
5 устройство 13 устанавливают на стойки 3 и А приемной площадки 2 и груз 13 укладывают по возможности равномерно на обе секции платформы 15. В
случае, если груз 14 уложен только на одну секцию, то на другую укладьгеают балласт. В зависимости от длины груза 14 выбирают положение блока 18 на платформе 15 и его сме5 щение к средней части платформы 15 ограничивают установкой пальца в направляющей плоскости 19. Перед подъемом при помощи механизма натяжения лебедки 1 создают определенное натяжение в замкнутом кана те 8, при котором обеспечивается предельное складывание рычагов 25 и 26 в направлении вертикальной оси. Далее- при помощи канатоведущих шкивов лебедки 1 и замкнутого каната 8
осуществляют подъем грузонесущего устройства 13 на необходимую высоту (фиг. 1, поз.А).При подъеме, как правило, центр тяжести груза 14 смещен от точек прикрепления каната 8
0 к грузонесущему устройству 13, создавая опрокидывающий момент. Однако он уравновешивается в основном за счет упругого отпора внешней ветви запасованной в блоки 18 и
5 22 и ролики 23. большое значение при этом имеет положение блока 18 относительно стойки 21, каретка 17 упирается в палец, установленный в Iнаправлякяцей плоскости 19. Таким
0 образом, для вертикального .движения грузонесущего устройства 13 необходимо определенное натяжение в замкнутом канате В, при котором его две ветви выполняют роль.натя5 нутых струн обеспечивающих равновесие устройства 13 и исключение его раскачивания; В процессе подъема от действия натяжения в замкну5 11 том канате 8 блок 10 на кровельной опоре 11 смещен от стены здания, После завершения подъема и включения шкивов лебедки 1 для горизонталного перемещения платформы 15 в про ем здания натяжение в замкнутом канате 8 сбрасываюти грузонесущее устройство 13 оказывается подвешенным только к верхней вершине четырехзвенника, образованного рычагами 25 и 26. Благодаря приложению нагрузки к консолям рычагов 25 четырехзвенник от действия сил тяжести складывается в направлении горизонтальной оси. Олновременно это .сопровождается раздвижением телескопа, благодаря соединению телескопических и верхних рычагов при помощи тяг 27. При этом платформа 15 смещается в проем, катясь направляюшими плоскостями 20 по роликам 24, установленным на кронштей- нах стойки 21 (фиг. 2, поз. Б). В начальный момент перемещения платформы 15 каретка 17 с блоком 18, будучи прижатой к пальцу движется вместе с платформой 15 в направлени стойки 21 до упора блока 18 в стойку 21. При дальнейшем перемещении платформы 15 каретка 17 скользит по направляющим плоскостям 19, в то же время оставаясь около стой ки 21.
Изменение расположения блока 18 по отношению к стойке 21 обусловлено изменением условия равновесия грузонесущего устройства 13, которое в этом случае должно рассматриваться относительно верхней вершины четырехзвенника. Плавающая же установка-блока 18 в этом случае играет роль балансира для изменения удерживаюш,его момента в широких пределах.
Расположение и ход блока 18 выбирают с таким расчетом, чтобы платформа 15 в конце подачи в проем небольшой наклон, при котором облег чается снятие длинномерного груза 14, Регулирование равновесия грузонесущего устройства 13 также производится степенью снижения в определенных пределах натяжения в замкнутом канате 8. В процессе подачи платформы .15 в проем происходит перемещение к стене здания блока 10 по кровельной опоре 11 от действия пружины. Благодаря этому сохраняется исходное положение грузонесущего устройства по высоте и увеличивается глубина подачи в проем. Разгрузку груза 14 осуществляют продольным стаскиванием при открытом борте 16. После разгрузки при помощи лебедки 1 создают натяжение в замкнутом канате 8, благодаря которому происходит складывание шарнирно рьгчажного механизма грузонесущего устройства 13 и выход платформы 15 из проема. От действия натяжения в канате 8 произойдет удаление от стены блока 10. расположенного на кровельной опоре.11. Далее, при помощи канатоведущих шкивов лебедки 1 грузонесущее устройство 13 подают на приемную площадку 2, где в момент касания опорных стоек 3 и 4 от действия концевого выключателя происходит Р танрвка привода лебедки 1. Перед очередной загрузкой платформы 15 из соображений техники безопасности снижают натяжение в замкнутом канате 8. Предлагаемая конструкция - подъемника позволяет эффективно решать вопросы подачи длинномерных грузов в проемы зданий. .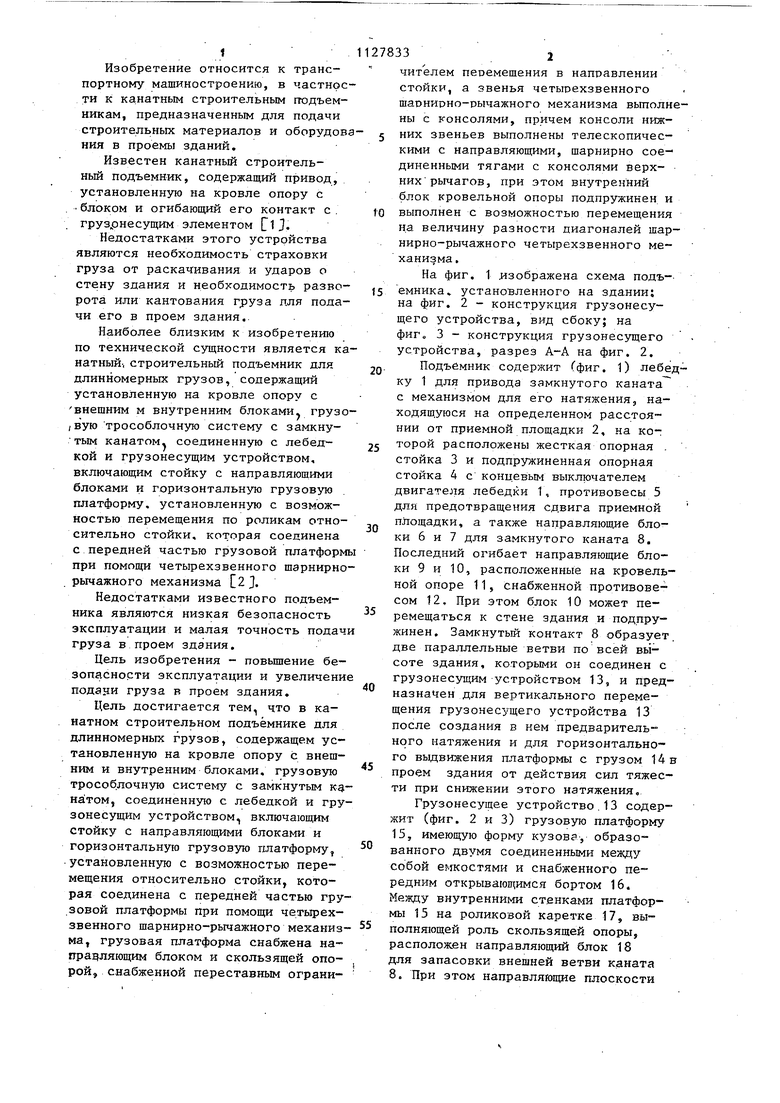

| название | год | авторы | номер документа |
|---|---|---|---|
| Канатный строительный подъемник для длинномерных грузов | 1981 |
|
SU1002222A1 |
| Строительный подъемник | 1981 |
|
SU977350A1 |
| Канатный строительный подъемник | 1979 |
|
SU867838A1 |
| Струнный строительный подъемник | 1987 |
|
SU1449503A1 |
| Струнный подъемник | 1978 |
|
SU753767A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Строительный подъемник | 1980 |
|
SU945042A1 |
| КРАН ДЛЯ ПОДЪЕМА И ПОДАЧИ ГРУЗОВ В ОКОННЫЙ ПРОЕМ ЗДАНИЯ | 1991 |
|
RU2048423C1 |
| Строительный подъемник | 1960 |
|
SU140547A1 |
| БОРТОВОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ВЕРТОЛЕТА | 2003 |
|
RU2245819C1 |

КАНАТНЫЙ СТРОИТЕЛЬНЬШ ПОДЪЕМНИК ДЛЯ ДЛИННОМЕРНЫХ ГРУЗОВ, содержащий, установленную на кровле опору с внешним и внутренним блоками, грузовую трособлочную систему с замкнутым канатом, соединенную с лебедкой и грузонесущим устройством, включающим стойку с направляющими блоками и горизонтальную грузовую платформу, установленную с возможностью перемещения по .роликам относительно стойки, кот-орая соединена с передней частьюгрузовой плат-у формы при помощи четырехзвенного шарнирно-рычажного механизма, о тличающийся тем, что, с челью повышения безопасности зксплуатации и увеличения точности подачи груза в проем здания, грузовая платформа снабжена направляющим блоком и скользящей опорой, снабженной переставным ограничителем перемещения в направлении стойки, а звенья четырехзвенного шарнирнорычажного механизма вьтолнены с консолями, причем консоли нижних звеньев выполнены телескопическими с направляющими, шарнирно соединены(Л ми тягами с консолями верхних рычагов, при этом внутренний блок кровельной опоры подпружинен и выполнен с возможностью перемещения на величину разности диагоналей шарнирно-рычажного четырехзвенного механизма , o к 00 Од 00
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чаньшев Р.О, Подъемники и легкие краны в строительстве | |||
| М., Стройиздат, 1975, с | |||
| Вагонный распределитель для воздушных тормозов | 1921 |
|
SU192A1 |
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Канатный строительный подъемник для длинномерных грузов | 1981 |
|
SU1002222A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
