1
Изобретение относится к подъемным устройствам.
Цель изобретения - повышение эффективности работы и уменьшение габаритов.
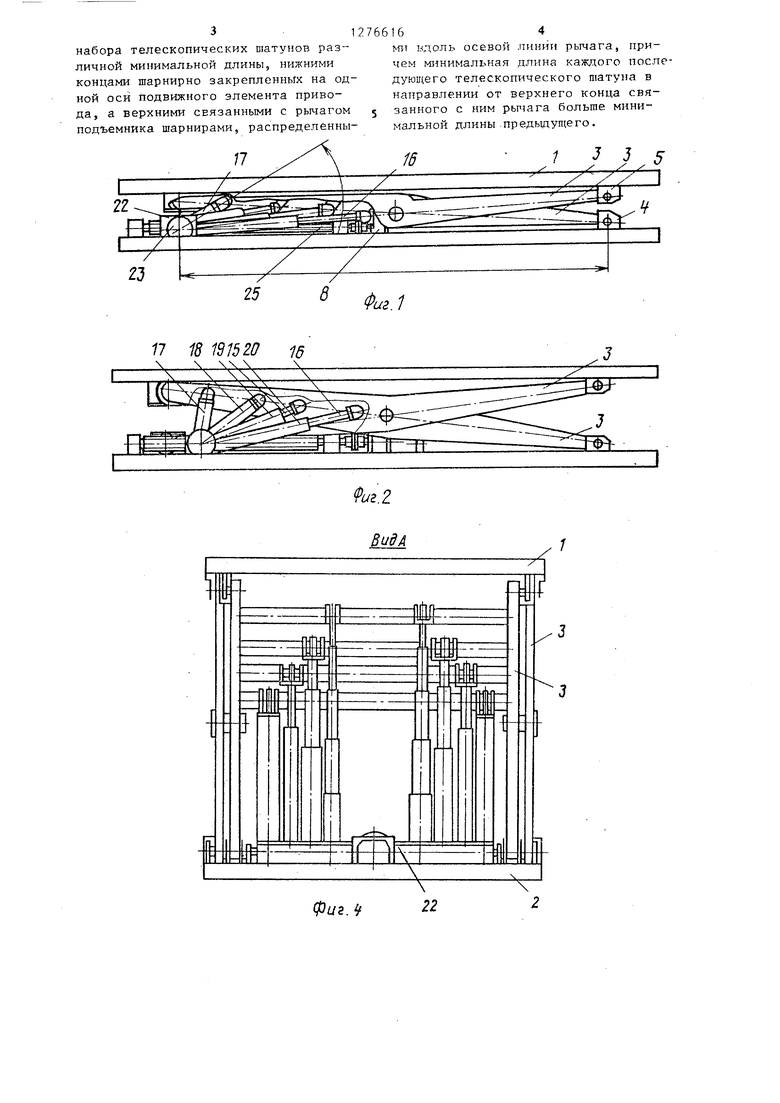
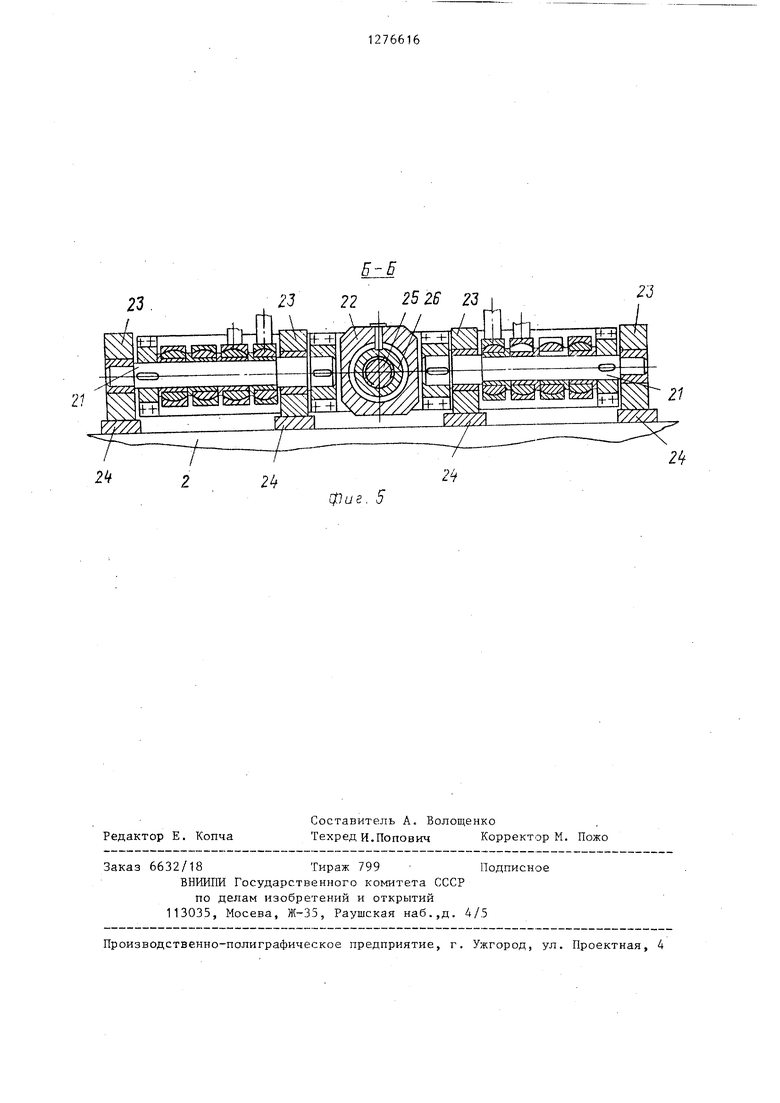
На фиг. 1 изображен подъемник в сложенном состоянии, общий вид; на фиг. 2 - подъемник в момент начала действия второй пары шатунов; на фиг. 3 - подъемник в поднятом состо- янии; на фиг. 4 - вид А на фиг,, 3; на фиг. 5 - сечение Б-Б на фиг.,3.
Подъемник состоит из верхней грузовой платформы 1 и неподвижного основания 2, которые связаны между собой двумя парами рычагов 3 типа нюрбергских ножниц, одни концы которых гаарнирно закреплены в кронштейнах 4 и 5, а другие установлены в горизонтальных направляющих 6 и 7 со ответственно подвижной платформы 1 и основания 2.
На основании 2 горизонтально установлен привод 8,. воздействующий на рычаги 3 через набор телескопических шатунов, состоящих из выдвигаемых штоков 9-16 и корпусов 17-20. Штоки верхним концом шарнирно связаны с рычагами 3, а корпуса шарнирно связаны с осями 21 подвижного элемента 22,, перемещающегося на катках 23 по направляющим 24. В свою очередь 5 подвижный элемент 22 приводится в движение приводом 8 через передачу винт 25 гайка 26, а длины корпусов 17-20 подобраны так, что нагрузка на винт 25 в момент начала силовог о действия любой пары корпусов 17-20 не превышает первоначальной, причем начальный угол наклона корпусов 17 обеспечивает максимальное плечо для поворота рычагов 3, а начало действия каждой последующей пары корпусов 18-20 совпадает с моментом, когда каждая пара корпусов 17-19 пре- дыдущих щатунов принимает перпендикулярное положение к паре перекрываю щихся рычагов 3.
Устройство работает следующим образом.
Подъем подвижной платформы 1 осуществляется включением привода 8, и винт 25, вращаясь, перемещает гайку 26 вместе с кареткой подвижным элементом 22 на катках 23 по направ- ляющим 24. При этом пара корпусов 17 (фиг. 1) раздвигает рычаги 3, одни концы которых поворачиваются в шанирах 4 и 5, а другие перемещаются в направляющих 6 и 7, что обеспечивает синхронный подъем платформы 1. Одновременно корпуса 18-20 (фиг.2) вместе с находящимися в них частично выдвинутыми подвижными звеньями 13-16 (фиг. 2 и 3) поворачиваются с осями 21 подвижного элемента 22, Причем подвижные звенья 13-16 постепенно утапливаются в корпусах 18-20. Пара корпусов 18 (фиг.2) в момент полного захода в них подвижных звеньев 13 и 14 начинает воспринимать нагрузку, высвобождая корпус 17, из которого под действием рычагов 3 начинают выдвигаться подвижные звенья 9-12, а подвижные звенья 15 и 16 продолжают утапливаться в корпусах 19 и 20 под действием рычагов 3. В дальнейшем нагрузку воспринимает пара корпусов 19, высвобождая пару звеньев 18, а затем - пара звеньев 20, высвобо/вдая пару звеньев 19, причем для обеспечения безопасности длины корпусов 17-20 подобраны так, что нагрузка снимается с каждой предыдугдей пары прежде, чем она дойдет до вертикального положения .
Опускание подвижной платформы 1 происходит при зрашении приводом 8 1,,инта 25 в противоположном направлении. Гайка 26 вместе с подвижным элементом 22 перемещается назад на катках 23 по направляющим 24, при этом пары корпусов 17-20, поочередно воспринимая нагрузку от рычагов 3 опускают платформу 1.
Формула изобретения
Подъемник 5 содержащий основание и подвижную плaтфop py, соединенные меж,ду собой двумя парами перекрещивающихся рычагов, образующих рычажно- шарнирную систему типа нюрнбергские ножницы, и .привод подъема, .подвижный элемент которого смонтирован в основании с возможностью горизонтального перемеш,ения параллельно плоскости поворота рычагов и кинематически связан с одним из последних, отличающийся тем, что, с целью повыиения эффективности работы и уменьшения габаритов, кинематическая связь подвижного элемента привода с рычагом выполнена в виде
набора телескопических П1ату1 ов различной минимальной длины, нижними концами шарнирно закрепленных на одной оси Подвижного элемента привода, а верхними связанными с рьмагом подъемника шарнирами, распределенны т ьдоль осевой линии рычага, причем минимальная длина каждого последующего телескопического шатуна в направлении от верхнего конца связанного с ним рьршга больше минимальной длины .предьщущего.
Риг.1
18 131520 ч
16
Фи.
23.
2 д
фиг. 5
Редактор Е. Копча
Составитель А. Волощенко
Техред и.Попович Корректор М. Пожо
Заказ 6632/18Тиояж VQQ п
кнмипът гПодписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 13035, Мосева, Ж-35, Раушская наб.,д. 4/5
Производственно-полиграфическое предприятие, г. УжгородГ улГпроёкт аяГА 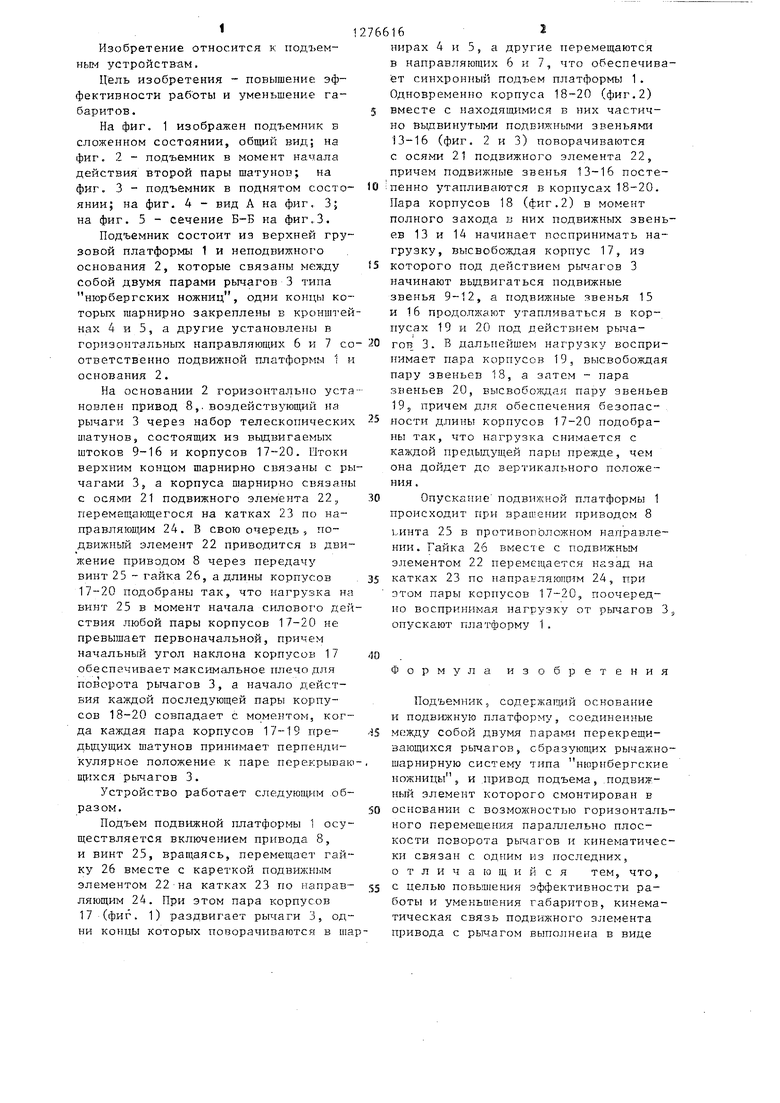
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК | 2003 |
|
RU2258665C2 |
| Подъемник для вывешивания формы-вагонетки | 1990 |
|
SU1766839A1 |
| Подъемник | 1985 |
|
SU1312067A1 |
| Подъемник | 1984 |
|
SU1239089A1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2008 |
|
RU2393986C2 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2003 |
|
RU2247815C1 |
| Подъемник | 1983 |
|
SU1232641A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| ТЕЛЕЖКА-ПОДЪЕМНИК ДЛЯ БОЛЬНЫХ | 2012 |
|
RU2520041C2 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
Изобретение относится к подъемным устройствам. Цель изобретения - повьтение эффективности работы и уменьшение габаритов. Подъемник содержит телескопические шатуны различной минимальной длины, нижними концами шарнирно закрепленные на оси подвижного элемента 22 привода, а верхними связанными с рычагом 3 шарнирами, распределенным вдоль осе вой линии рычага 3. 5 ил. |Ю д о: О5 О5 2 Фиг.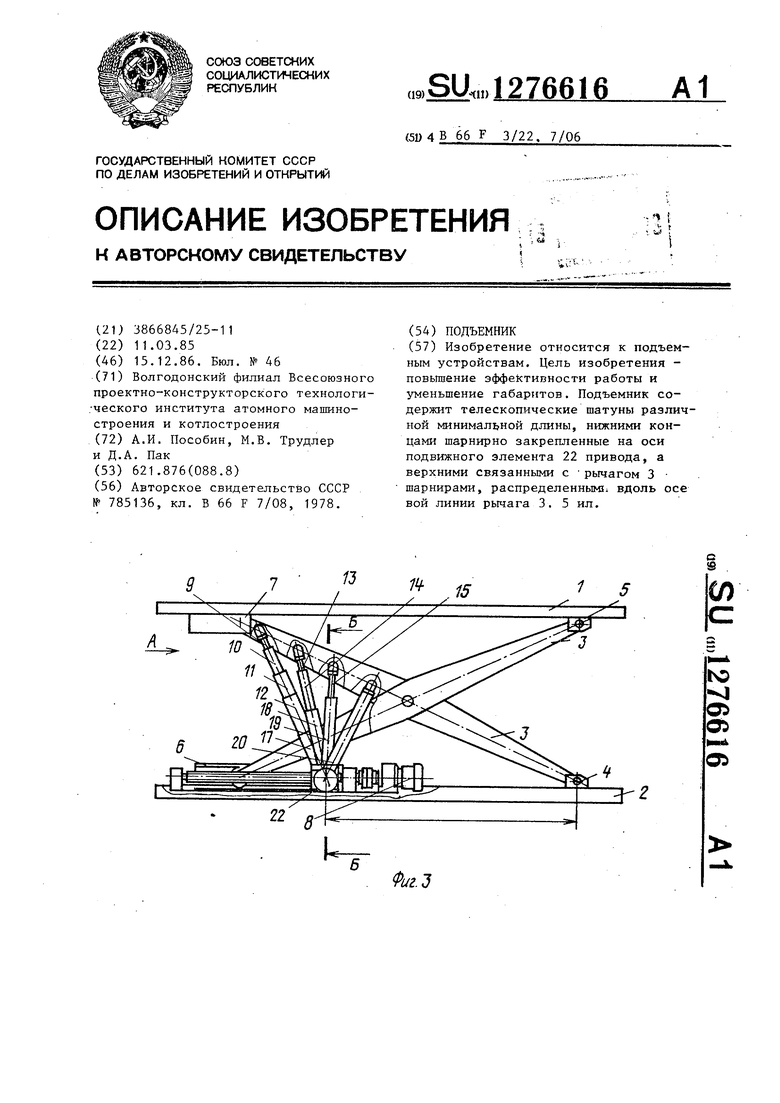
| Цепной подъемник цилиндрических изделий | 1978 |
|
SU785136A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
