Оператор с помощью переключателя 1 вида сигналов дешифратора команд 3 и программного блока 4 вводит в регистр 8 номер секции, подготавливаемой к перемещению. После нормированного числа циклов контроля исправности телемеханической системы, отсчитываемых по сигналам с элемент И 9, при которых проверяется синхронность работы счетчика 7 секций срепи с распределенным переключатеИзобретение отно.сйтся к области автоматики и телемеханики и может быть использовано в системах управления передвижкой секций шахтной гидрокрепи .
Цель изобретения - повьшение безопасности эксплуатации и упрощение устройства управления перемещением шахтной идpoкpeпи,
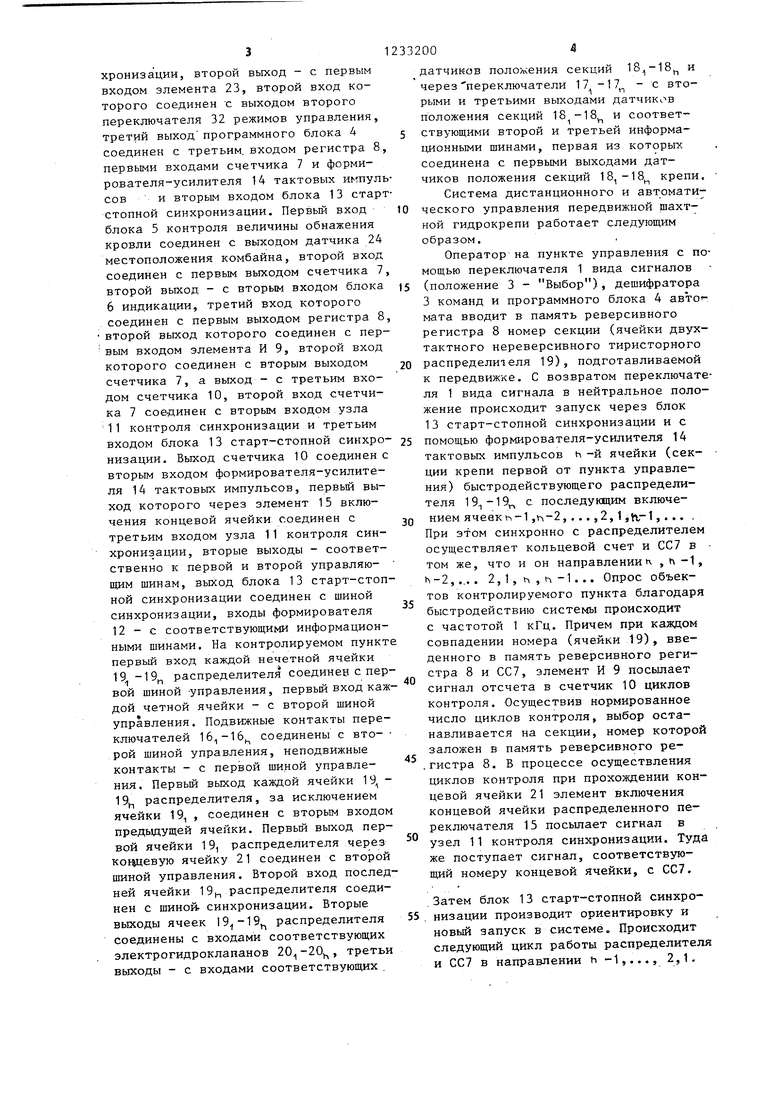
На чертеже изображена блок-схема системы дистанционно-автоматического управления передвижкой секций шахтной гидрокрепи, реализующая за- являемьй способ.
Она содержит переключатель 1 вида сигнала (с- Сброс, J - Выбор), первьм переключатель 2 режимов управления (а- Автоматическое-вниз, Дис.-танционное -.вниз, В- Контроль „г Отключено , - Дистанционное- вверх 3 е- Автоматическое - вверх) дешифратор 3 команд, программный бло 4s блок 5 контроля величины обнажения кровли5 блок 6 индикации . ,счетчик 7 секции (СС) с непосредственной установкой в состояние, обозначающее номер п-и секции, нереверсивный реверсивньш регистр 8, элемент И 9, счетчик 10 циклов контроля, узел 11 кхэнтроля синхронизации, формирова- тель 12 сигналов датчиков, блок 13 старт-стопной синхронизации, формирователь-усилитель 14 тактовых импульсов, элемент t.5-. включения концевой ячейки распределителя, первые
переключатели , вторые переключатели ГД-17.,. датчики (1-распо h 5
pas II переднего, III - заднего) положения секций кpeпиs ячейлем, подтверждается исправность всей системы и выдается команда на подключение к ней исполнительных механизмов. Наличие диспет черского и контролируемого пунктов предусматривает выбор соответствующей ячейки 19/-19f(-v распределителя по команде оператора или управляющего автомата, или п о командам дистанционного управления, подаваемым с любой секции крепи на контролируемом пункте. 1 ил.
O
s 0 5 о
5
ки 19 распределителя, управляемого по шинам питания, электрогидроклапат ны 20 управления, концевая ячейка распределителя 21, второй переключатель 22 режимов управления Местное, Автоматическое, элемент 23 управления переключением секций и датчик 24 местонахождения комбайна (ДМК).
Система работает следующим образом.
Подвижный ко,нтакт переключателя 1 вида сигнала соединен с выходом источника питания, а его неподвижные контакты соединены с соответствующими первым и вторым входами дешифратора 3 команд, третий.вход которого соединен с первым выходом программного блока 4 и первым входом узла 11 контроля синхронизации. Пёрвьй выход дешифратора 3 команд соединен с первым входом регистра 8, второй выход - с первым входом счетчика 10J третий выход - с первым входом блока 13 старт-стопной синхронизации. Подвижный контакт переключателя 2 режимов соединен с выходом
источника напряжения, неподвижные контакты - с соответствующими первы1 ш
входами программного блока 4, .второй вход которого соединен с первым выходом блока 5 контроля обнажения кровли, третий вход - с вторыми входами регистра 8 и счетчика 10 и выходом элемента 23 управления переключением секций, четвертый вход - с выходом формирователя 12 сигналов датчиков, первым входом блока 6 индика- цик и выходом узла 11 контроля синхронизации, второй выход - с первым входом элемента 23, второй вход которого соединен с выходом второго переключателя 32 режимов управления, третий выход программного блока 4 соединен с третьим, входом регистра 8, первыми входами счетчика 7 и формирователя-усилителя 14 тактовых импульсов и вторым входом блока 13 старт- стопной синхронизации. Первый вход блока 5 контроля величины обнажения кровли соединен с выходом датчика 24 местоположения комбайна, второй вход соединен с первым выходом счетчика 7, второй выход - с вторым входом блока 6 индикации, третий вход которого соединен с первым выходом регистра 8, второй выход которого соединен с пер- вым входом элемента И 9, второй вход которого соединен с вторым выходом счетчика 7, а выход - с третьим входом счетчика 10, второй вход счетчика 7 соединен с вторым входом узла
11контроля синхронизации и третьим входом блока 13 старт-стопной синхронизации. Выход счетчика 10 соединен с вторым входом формирователя-усилителя 14 тактовых импульсов, первый выход которого через элемент 15 включения концевой ячейки соединен с третьим входом узла 11 контроля синхронизации, вторые выходы - соответственно к первой и второй управляю- пщм шинам, выход блока 13 старт-стопной синхронизации соединен с шиной синхронизации, входы формирователя
12- с соответствующими информационными шинами. На контролируемом пункте первый вход каждой нечетной ячейки
19, -19, распределителя соединен с первой шиной управления, первый вход каждой четной ячейки - с второй шиной управления. Подвижные контакты переключателей соединены с вто- рой шиной управления, неподвижные контакты - с первой шиной управления. Первьй выход каждой ячейки 19 - 19 распределителя, за исключением ячейки 19, , соединен с вторым входом предыдущей ячейки. Первый выход первой ячейки 19, распределителя через овдевую ячейку 21 соединен с второй иной управления. Второй вход последей ячейки 19,-, распределителя соедиен с шиной- синхронизации. Вторые ыходы ячеек 19,,-19, распределителя оединены с входами соответствующих электрогидроклапанов , третьи ыходы - с входами соответствующих .
датчиков положения секций и через переключатели 17 -17 - с вторыми и третьими выходами датчиков положения секций 18 -18 и соответ- ствующими второй и третьей информационными шинами, первая из которых соединена с первыми выходами датчиков положения секций 18,-18 крепи. Система дистанционного и автомати0 ческого управления передвижной шахтной гидрокрепи работает следующим образом.
Оператор на пункте управления с помощью переключателя 1 вида сигналов
5 (положение 3 - Выбор), дешифратора 3 команд и программного блока 4 автог мата вводит в память реверсивного регистра 8 номер секции (ячейки двухтактного нереверсивного тиристорного
0 распределителя 19), подготавливаемой к передвижке. С возвратом переключателя 1 вида сигнала в нейтральное положение происходит запуск через блок 13 старт-стопной синхронизации и с
5 помощью формирователя-усилителя 14 тактовых импульсов h-и ячейки (секции крепи первой от пункта управления) быстродействующего распределителя с последугацим включе0 ниемячеакь-1 ,, .. .,2,1,tv-1,. .. . При этом синхронно с распределителем осуществляет кольцевой счет и СС7 в том же, что и он направлении к ,п -1, -2, .... 2, 1, h , п -1... Опрос объек тов контролируемого пункта благодаря быстродействию системы происходит с частотой 1 кГц. Причем при каждом совпадении номера (ячейки 19), введенного в память реверсивного регистра 8 и СС7, элемент И 9 посьшает сигнал отсчета в счетчик 10 циклов контроля. Осуществив нормированное число циклов контроля, выбор останавливается на секции, номер которой заложен в память реверсивного ре- .гистра 8. В процессе осуществления циклов контроля при прохождении концевой ячейки 21 элемент включения концевой ячейки распределенного переключателя 15 посылает сигнал в узел 11 контроля синхронизации. Туда же поступает сигнал, соответствующий номеру концевой ячейки, с СС7.
Затем блок 13 старт-стопной синхро- 5 , низации производит ориентировку и новый запуск в системе. Происходит следукнций цикл работы распределителя и СС7 в направлении h -1,..., 2,1.
5
0
5
O
S 1233
В случае рассинхронизации, обрыве линий связи или при одновременном включении нескольких ячеек двухтактного нереверсивного тнристорного расх ределителя 19 19| на выходе уз- 5 ла 11 контроля синхронизации появляется сигнаЛд запрещающий отработку программы,, заложенной в логическом блоке 4, и вклЕочение электрогидро- клапана выбранной ячейки по- Ю еле перевода переключателя 2 режимов управления в положение Автом., (Q или е), Оператор с помощью блока 6 индикации, -куда также поступает информация с блока 5 контроля вели- 13 чины обнажения кровли (ДМК24), формирователя 12 сигналов датчиков, состояния датчиков положения секций 18 - 18п производит анализ причин остановки. 20
При нормальной отработке программы секцией в память реверсивного ре- гис.тра 8 .с помощью логическото блока 4 или оператором на пункте управ- 25 ления вводится номер следующей, ячейки (секции) в направлении, установленном переключателем 2 режимов. Затем осуществляется ее выбор.
Отличие местного режима работы, п установленного с помощью второго переключателя 22 режима управления, от автоматического заключается в том, что до нажатия переключателя 17 реверсивный регистр 8, СС7 и распреде- леяньй переключатель в лаве синхронно работают, осуществляя кольцевой счет в направлении и ,ь-1,... ,4-2,1., ь,„„„ После нажатия переключателя 17; на электроблоке любой из секций в соответствии с правилами безопасности элемент управления переключением секций 23 с -помощью реверсивного регистра В выбирает соседнюю по ходу передвижки секцию в направлении, заданном на пункте управления пере- ключателем 2 режимов. Дальше все происходит аналогично автоматическому режиму работы. При нажатии переключателя 16j в лаве на любом элек- троблоке происходит ориентировка, в системе, а также осуществляется пере- ход на синхронную работу реверсивно- - го регистра, СС7 и распределенного переключателя. При этом происходит переход последней из выбранных сек- ий в режим распора. Система подгоовлена к очередному нажатию пере- падчателя 17,
35
40
45
50
5 Ю 13 20
25
п -
5
0
5
0
200g
Построение системы на базе нереверсивных счетчика секций крепи и двухтактного,тиристорного распределителя позволило сократить количество требуемых линий связи и упростить схему диспетчерского пункта.
Таким образом, предложенное устройство для дистанционного управле, ния перемещением секций.шахтной гидрокрепи позволило повысить безопасность эксплуатации и упростить применяемую для управления и контроля аппаратуру. Устройство применено в проекте модернизированной аппаратуры автоматизации крепи КГУ-Д для крутых
пластов.
Фор мула изобретения
Устройство для дистанционного управления перемещением секций шахтной гидрокрепи, содержащее на диспетчерском пункте блок индикации, на контролируемом.пункте датчик местоположения комбайна, соединенный с первьЕм входом блока контроля величины обнажения кровли, ячейки распределителя, датчики положения секций, электрогидроклапаны, о т л и ч а ю- щ 8 е с я тем, что, с целью повышения безопасности эксплуатации и упрощения устройства, на диспетчерском пункте введены переключатель вида, сигнала, первый переключатель режимов управления, дешифратор команд, программный блок, счетчик секций, реверсивньм регистр, элемент И, счетчик циклов контроля, узел контроля синхронизации, формирователь сигналов датчиков, блок старт-стопной синхронизации, формирователь- усилитель тактовых импульсов, элемент включения концевой ячейки распределителя, элемент управления переключением секции, второй переключатель режимов управления, подвижный контакт переключателя вида сигналов соединен с клеммой источника напряжения,пер- вьй и второй неподвил ные контакты соединены соответственно с первым и вторым: входом дешифратора команд, третий вход которого соединен с первым выходом программного блока и объединен с первым входом узла контроля синхронизации, первый выход дешифратора команд соединен с первым входом реверсивного регистра, второй выход - с первым входом счетчика циклов контроля, третий выход - с первым входом блока старт-стопной синхронизации, подвижный контакт первого . переключателя режимов управления соединен с клеммой источника напряжения, неподвижные контакты - с соответствующими входами программного блока, второй вход которого соединен с первым выходом блока, контроля величины обнажения кровли, тре тий вход - с вторыми входами реверсивного регистра и счетчика циклов контроля, выходом элемента управления переключением секций, четвертый вход соединен с выход ом формирователя сигналов датчиков, первым входом блока индикации и выходом узла контроля синхронизации, второй выход - с первым входом элемента управления переключением секций, второй вход кото- рого соединен с выходом второго переключателя режимов, третий выход программного блока соединен с третьи входом реверсивного регистра, первыми входами счетчика секций и формиро вателя-усилителя тактовых импульсов и вторым входом блока старт-стопной синхронизации, второй вход блока контроля величины обнажения кровли соединен с первым выходом счетчика секций, второй выход - с вторым входом блока индикации, третий вход которого соединен с первым выходом реверсивного регистра, второй выход которого соединен с первым входом эле- мента И, второй вход которого соединен с вторым выходом счетчика секции, выход - с третьим входом счетчика циклов контроля, второй выход счетчика секций соединен с вторым входом узла контроля синхронизации и третьим входом блока старт-стопной синхронизации, выход счетчика циклов контроля соединен с вторым входом формирователя-усилителя тактовых им-
Редактор С. Патрушева
Составитель В. Бутин Техред Л.Сердюкова
Заказ 2775/53Тираж 515
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
пульсов, первый выход которого через элемент включения концевой ячейки распределителя соединен с третьим входом узла контроля синхронизации, на контролируемом пункте введены первые и вторые переключатели с замыкающими контактами, управляющие щины, шина синхронизации и информационные шины, первый вход каждой нечетной ячейки распределителя соединен с первой управляющей шиной, первый вход каждой четной ячейки распределителя соединен с второй управляющей шиной, первый выход каждой ячейки распределителя, кроме первой, соединен с вторым входом предыдущей ячейки распределителя, первьй выход первой ячейки распределителя через концевую ячейку распределителя соединен с второй управляющей шиной, второй вход последней ячейки распределителя соединен с шиной синхронизации, вторые выходы каждой ячейки распределителя соединены с входами соответствующих электрогидроклапанов, третьи выходы соединены с входами соответствующих датчиков положения секций и подвижными контактами вторых переключателей, неподвижные контакты которых соединены с вторыми и третьими информационными шинами и первыми и вторыми выходами датчиков положения секций, третьи выходы которых соединены с первой информационной шиной, первые переключатели подключены параллельно к первой и второй управляющим шинам, соединенным с соответствующими выходами формирователя-усилителя тактовых импульсов на диспетчерском пункте, шина синхронизации и информационные шины подключены соответственно к выходам блока старт-стопной синхронизации и формирователя сигналов датчиков на диспетчерском пункте.
Корректор С. Шекмар
Подписное

| название | год | авторы | номер документа |
|---|---|---|---|
| Система телемеханики для управления передвижкой секций шахтной гидрокрепи | 1985 |
|
SU1269171A1 |
| СИСТЕМА ТЕЛЕМЕХАНИКИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖКОЙ СЕКЦИИ ШАХТНОЙ ГИДРОКРЕПИ | 1969 |
|
SU245710A1 |
| Способ диагностики неисправностей телемеханического тракта аппаратуты автоматики шахтной гидрокрепи для пластов крутого падения | 1985 |
|
SU1399475A1 |
| Устройство для регистрации потоков подвижных объектов | 1984 |
|
SU1193704A1 |
| УСТРОЙСТВО ДЛЯ ЦИФРОВОЙ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ РЕЧЕВОЙ ИНФОРМАЦИИ | 1992 |
|
RU2008728C1 |
| Устройство для централизованного контроля и оперативного управления | 1977 |
|
SU633029A1 |
| Приемный старт-стопный распределитель | 1976 |
|
SU621116A2 |
| УСТРОЙСТВО для СОПРЯЖЕНИЯ | 1971 |
|
SU321839A1 |
| Преобразователь угла поворота вала в код | 1985 |
|
SU1282330A1 |
| Устройство для контроля программ | 1987 |
|
SU1418720A1 |
Изобретение относится к области автоматики и телемеханики и может быть использовано в системах управления передвижной секцией шахтной гидрокрепи. Цель изобретения повышение надежности работы и упрощение системы. Система содержит диспетчерский пункт, соединенный с контролируемым пунктом, содержащим ячейки 19 -19 распределителя и в каждой секции датчик положения секций 18,- 18 крепи, электрогидроклапаны управления 20,, концевую ячейку 21 и переключатели и 17. -17| « S Л. Ш f пя а LILIL 1L ьЛпЖ. Ю ОО- ОЗ 1чЭ О О

| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Руководство по эксплуатации, Донецк, 1982, Рабинович М.С | |||
| Элементы системы автоматического управления, гидрофици-, рованными крепями | |||
| М.; Недра, 1977, с | |||
| Приспособление, заменяющее сигнальную веревку | 1921 |
|
SU168A1 |
| Способ размножения копий рисунков, текста и т.п. | 1921 |
|
SU89A1 |
