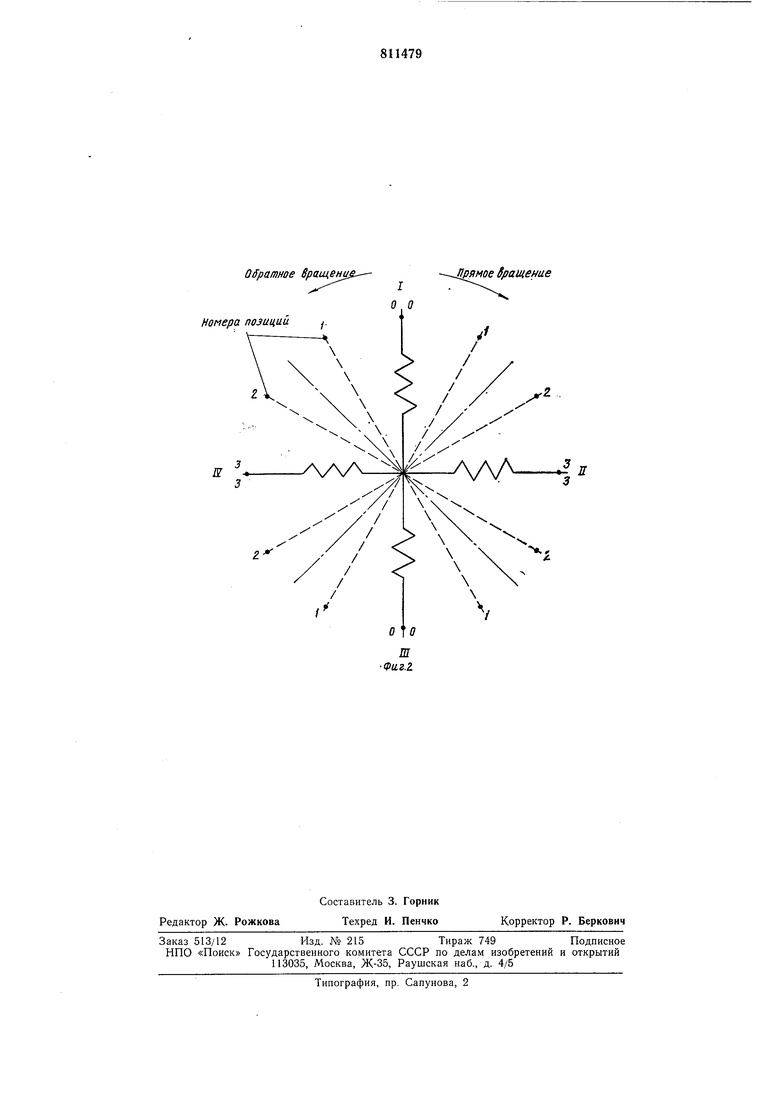
лителя 1, подключенного выходами к входам блока 9 и сумматора-вычитателя 12, связанного вторым входом с выходом элемента 13 запрета. Входы преобразователя 14 когда соединены с выходами сумматоравычитателя 12 и блока 9. Коммутатор 15 связывает схему 8 коммутации фаз с входом элемента 13 запрета. Привод работает следующим образом. В момент поступления на вход сумматора 10 кода числа отрабатываемых позиций К. в нем осуществляется суммирование этого кода со значением кода позиции фиксации старта LO, поступающего с выхода сумматора-вычитателя 12. Результат суммирования остается неизменным в течение цикла отработки заданного числа позиций (запоминается в сумматоре 10) и делится на я в делителе И. Целая часть деления N, равная числу целых шагов отработки, поступает на блок управления разгона и торможения. При этом блок формирует сигнал «Пуск, поступающий на схему 8 и преобразователь 14. Алгоритм вычисления целых шагов N и номер позиции фиксации ротора L определяется уровнем потенциального сигнала с коммутатора 15. При единичном уровне число целых шагов определяется по формулеа При нулевом уровне К + (п - LO) где К - число отрабатываемых позиций; п - кратность дробления шага; LO - номер позиции предыдушей фиксации или позиции старта. Номер позиции фиксации L определяется в первом случае как остаток от деления «а выражения (1) (L a), а во втором - как разность между л и остатком от деления «а выражения (2), т. е. L n-a. Нумерация позиций внутри шага (О, 1, 2, 3...) нроизводится всегда в одном направлении (фиг. 2) независимо от направления вращения ротора. Уровень потенциала на выходе коммутатора 15 зависит от номера включенных фаз и наличия сигнала «Реверс. Алгоритм работы коммутатора описывается в таблице. Схема 8 коммутации фаз управляет через усилитель 3 мощности различными рел имами работы двигателя (нуск, разгон, тормолсение, фиксация, реверс) путем соответствующего изменения порядка коммутации фаз относительно сигналов с датчика 2, поступающих на схему коммутации фаз в виде т-разрядного параллельного кода. При ноступлении сигнала «Пуск схема 8 осуществляет такой порядок коммутации фаз, который соответствует пуску двигате() (2) т а б .1 я ц а ля. Преобразователь 14 кода обеспечивает вместе с преобразователями 6 и 7 и регулятора.ми 4 и 5 напряжения номинальное напряжение питания на фазах двигателя при отработке целых шагов. При отработке последнего шага блок 9 управления формирует сигнал «Фиксация на схему 8 и нреобразователь 14. Схема коммутации фаз при этом осуществляет порядок коммутации фаз двигателя 1 относительно сигналов с датчика 2, соответствующий фиксации ротора двигателя. Преобразователь 14 кода в зависимости от кода позиции фиксации формирует на двух выходах коды, обеспечивающие через преобразователи 6 и 7 и регуляторы 4 и 5 уровни фазных напряжений, соответствующие требуемой позиции фиксации. Значения этих кодов запоминаются в преобразователе 14 кода и остаются неизменными во время действия сигнала «Фиксация. Код позиции фиксации определяется следующим образом. При поступлении нулевого уровня потенциала с выхода коммутатора 15 на вход элемента 13 запрета на его выходе формируется нулевой сигнал, поступающий на информационный вход су.мматора-вычитателя 12 и сигнал управления, нереводящий его в режим работы «Суммирование. При этом код остатка «а деления с выхода делителя 11, проходя без изменения через сумматор-вычитатель 12, определяет код нозиции фиксации. При поступлении единичного уровня потенциала на элемент 13 занрета код кратности деления п поступает на вход сумматора-вычитателя 12, который переводится в режим работы «Вычитание. В этом случае на его выходе формируется код позиции фиксации, определяемый по алгоритму (л-а). Сигнал с выхода коммутатора 15 на элемент 13 поступает пепрерывно в течение всего времени работы схемы. Уровень потенциала на выходе коммутатора 15, как указывалось выше, зависит от номера включаемых фаз (фиг. 2) и наличия сигнала «Реверс. Алгоритм его работы описывается в таблице. Привод имеет большие функциональные возможности вследствие того, что один и тот лее датчик шагов и схема управления
могут использоваться для получения в нем различной информационной емкости.
Формула изобретения
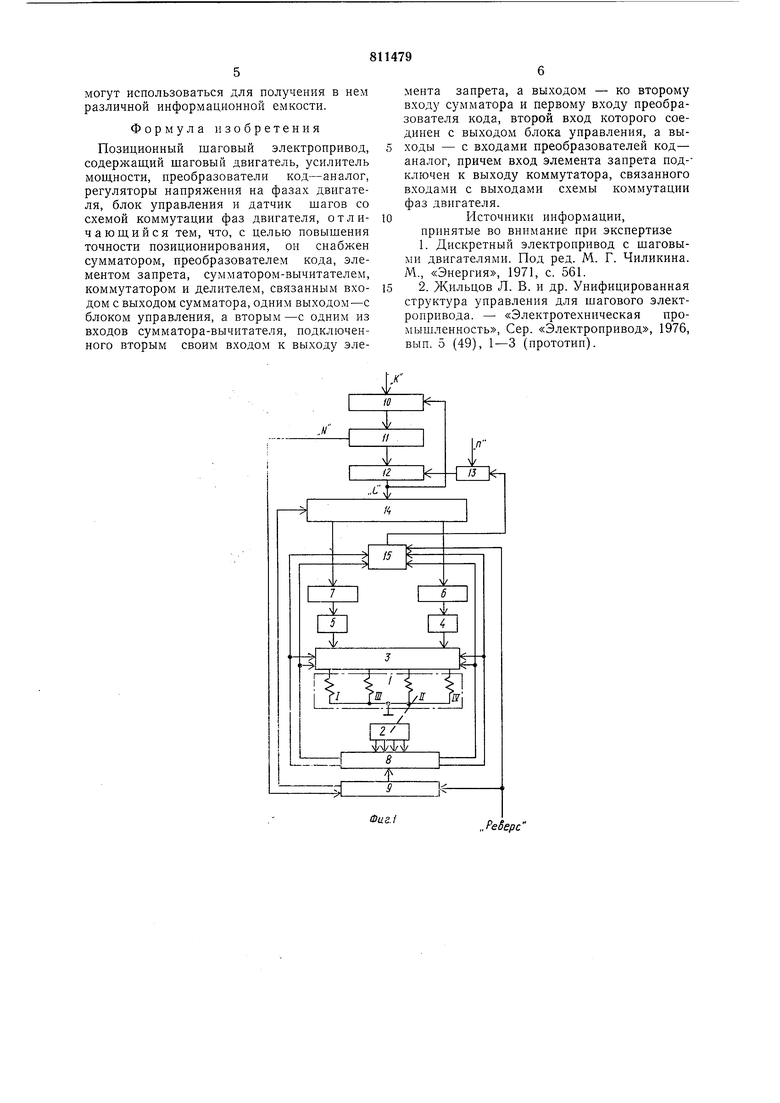
Позиционный шаговый электропривод, содержащий шаговый двигатель, усилитель МОШ.НОСТИ, преобразователи код-аналог, регуляторы напряжения на фазах двигателя, блок управления и датчик шагов со схемой коммутации фаз двигателя, отличаюшийся тем, что, с целью повышения точности позиционирования, он снабжен сумматором, преобразователем кода, элементом запрета, сумматором-вычитателем, коммутатором и делителем, связанным входом с выходом сумматора, одним выходом-с блоком управления, а вторым -с одним из входов сумматора-вычитателя, подключенного вторым своим входом к выходу элемента запрета, а выходом - ко второму входу сумматора и первому входу преобразователя кода, второй вход которого соединен с выходом блока управления, а выходы - с входами преобразователей код- аналог, причем вход элемента запрета под-ключен к выходу коммутатора, связанного входами с выходами схемы коммутации фаз двигателя.
Источники информации,
принятые во внимание при экспертизе 1. Дискретный электропривод с шаговыми двигателями. Под ред. М. Г. Чиликина. М., «Энергия, 1971, с. 561.
2. Жильцов Л. В. и др. Унифицированная структура управления для шагового электропривода. - «Электротехническая промышленность. Сер. «Электропривод, 1976, вып. 5 (49), 1-3 (прототип).
Фиг.1
„PeSepc
Обратное Вращение--- Прямое Крашение
Номера позиции .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ торможения шагового электродвигателя и устройство для его осуществления | 1982 |
|
SU1032585A1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Устройство для управления шаговым двигателем | 1984 |
|
SU1233258A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Устройство для регулирования величины деформации проводника при сварке давлением | 1988 |
|
SU1574405A1 |
| Устройство для управления механизмом резания листорезальной машины | 1988 |
|
SU1541559A1 |
| Устройство для управления шаговым электродвигателем | 1980 |
|
SU936340A1 |
| Дискретный электропривод со стабилизацией скорости | 1983 |
|
SU1108601A1 |