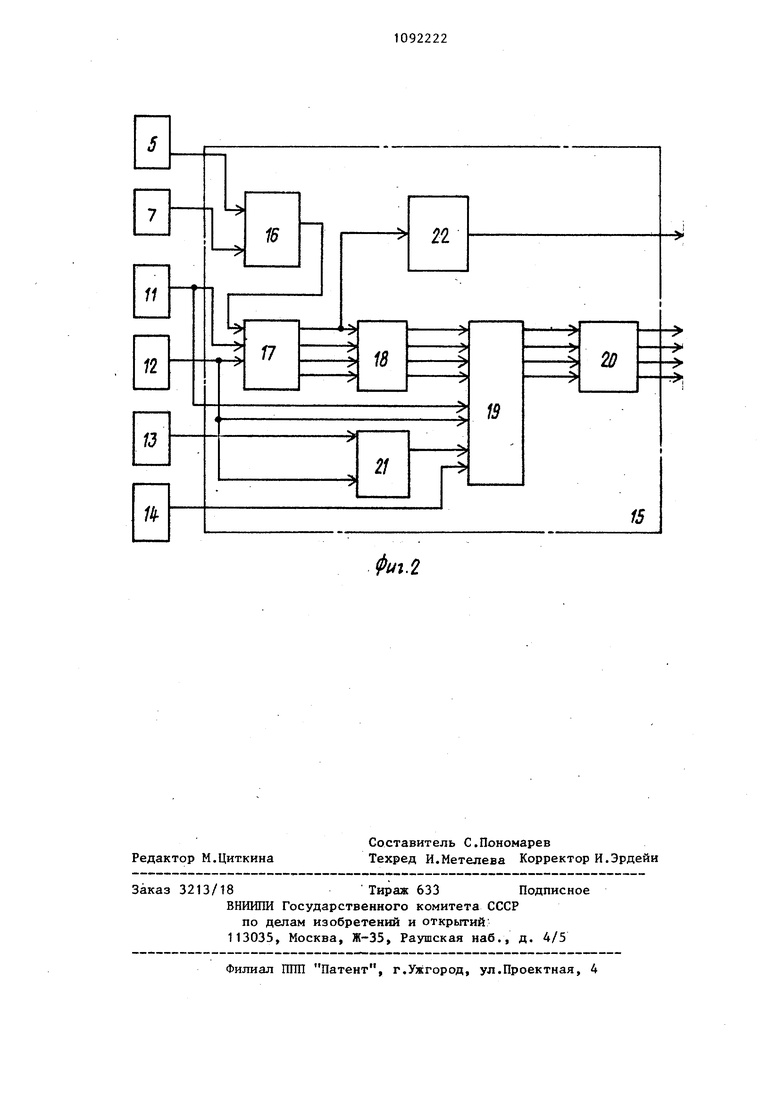
31 мандоаппарат с датчиками я(1меро.в ванн и датчиками положения актосшератора, а такя;е загрузочно-разгрузочный механизм, выполненный в виде последовательно расположенньсч двух- -цепного горизонтального транспортера и примыкающего к нему двухjieriHoro вертикального элеватора, ; .;;мзонталь ный транспортер снабжен , датчиками занятости позиций, командоаппарат снабжен логическим блоьгом управления загрузочно-разгрузоч;иы:ч г-шханизмом, а вертикальный элеватор - дат чиком занятости первой позицирч и датчиком занятости последней позиции, причем первый датчик занятости позиции соединен с первьм входом логического блока, второй датчик занятости позиции соединен со вторьм вход9м логического блока, третий и четвертый входы которого сседд- нены соответственно с датчиком номера загрузо-гноразгрузочной позиции и датчиком положения автооператора вверх, а датчики занятости первой и последней позиций подключены соответственно к пятому и шестому логического блока Логический блок выполнен в виде триггера состояния автооператора, узла дешифрации, узла технологических задержек, узла памяти, схемы И, узла связи и узла индикации, причем третий и четвертый входы логического блока подключены соответственно к пер вому и второму входам триггера состояния автооператора, выход которого подключен к первому входу уз.ча дешиф рации, второй и третий входы последнего соединены с первым и вторым |входами логического блока; первый, второй, третий и четвертый выходы узла дешифрации подключены соответственно к первому, второму, третьему и четвертому входаь узла памяти через узел технологических задержек, а первый и второй входь логического блока соединены соответственно с пятьг-i и uiecTbM входами узла памяти, первый, второй, третий и четвертый выходы последнего соединены через узел связи соответственно с первым, втopы i, третьим и четвертым выходами логического блока, второй и пятый входы которого подключены соответственно к первому и седьмому входам схемы И, а выход последней подключен к седьмому входу узла памяти, восьмой «ход которого подключен к шестому входу логического блока, первый выход узла дсиифрации ОлчЛччг;; к PXLMIV y;j.i;- iii-fдикацки, BbKo:i коЗорсго cc-enniicii с пятым зыходо:--; лог;;-:сского бгскя , На фгзг. изобрлжспл линия с загруз о-раз гру5ОЧН1-ГМ iMPxaii;{з;ч м, об:дий БИТ;:; :: /иг- 2 -- блок-схома автоматичс с-:ого Г:рарления заггузоп-но раз грззсчпым .i: Aвтo ;aтlI-cc;чaг лигп-гя содйг -пт- га Птнапичеста х .к: I. .4oy-:oiini-K по ходу Texi;OToi-i4.::cKCj-c и: -:i-:-cca, ав rooncy 2, ка/ эЛ;;;о r/nnrji 3, кол1р;естло которых :o;4;sr ;:т: oaзл : г HbDi, кэ :яи;:сапг,лр:т .; л.тч;1:сп 5 иомероп уптйг сзлслныс кпст: дои Б . случге г.-. ролчге 5, по которому дл5л:-:сгся пптоопорагг 3. и датчмь: 7- . ст;:;|;пг:теннь;й us . о операторе и ка яг;с; Л1Й его положе;р;е Загрузо гло-разгруясч: Ь1Й лtxsri;; -; ней 3 виде посгкул ;п ельно .пожспных диухцопног,: г j:: :;:;о::т. ра-спортера 8 и прЛ;ь:кй ог:;: го к л1у::;цепного вер7икал1л;::и л злепагспа -. Горизолтальныг -л;:-, гслорт-р Р u-ieGr три ПОЗНиИИ i о ЛЛЛСЛ:и1И КЙТОЛП: А штаи I: спабже;г ,аатч;1ка 1Н i 1 и 12 занятости по:-п1 ий. Вертл каллпьп эленгтор 9 С:;аблсе 1 латчиг:ом -3 занятости первой no3i;:;;;K п датчике - 14 занятости последлсп позиции. Управление загрузолно-ра руроч11Ь т-; мехаттизjiOj ii iecKH ; блох -5содсржапшй триглл л ;6 (ф:л% 2), г нфор-миру;о:: ЛЙ о лол-тлсллл: а лтоолера торяTpi rrcp 16 сргз;л; с 7 дегш-тфра-ции 5 которь;й через 1 технолсг;-ческнх задержек л слою очсрсдтт сллза : с узлом 19 ламятИ; лоследний же соединен с 20 сллзл и 21, пнпол1 ЯЮ1цей функцггщ и. Узел 22 иь1дик;лции суязан с узло: - 7 лег-л фрац-И, Авто тгтическал j р-ботает Cjieдующим образо;-. Перед запусксм л 1Н-л- гее латодныа 1итам;л; 3 га.га;4Сль; нп вер-тикально--; эло;л ;чл : л рсктажннк закрештяет с лслп. на катоДной uiTaiire, распслолсз;:ко;; на пиаггей позиции злезатора. лтл; ис,лходе автооператора 2 к лсз:лил- за)л:узк)1-раз грузки за пгтанл: : грлггер 16 псе-тупает сигьшл, уст;л-;аил1 Ба10ший тритгер в нулевое состоя ;ис. При зтом на всех входах узла 1 - ь:меются нулевые сигналы, fia выходах узла 17 фop Пfpyeтcя код, соотзетствующий дБЮкенмю элеватора ршгз . С первого
выхода узла 1/ постуг:а т нп узел 22 инцикацик., и при aai-opasfnu лампы монтажник закрепляет яа к;пол,ной штанге 3 подвеску с деталями, Через короткое время:, опре71ел-яе гое узлом 18 задержки, ксД движения г(сч:;тупает на узел 19 памяти, где ; : я С:минается. С узла Псгмити код .ii,Hi-ra:e i:F блок магнитных пугкаГеле ч u иы) и далее на исполнительГо: м - низмы. Код дв iжeния сохрат1яет1 памяти до тех пор, газка като JIIH i i га 3 не опустГТея с вертикал; ипэлеватора 9 ка гс)(-:11тальныгi портер 8 загрузочнс-разгрузс i, 5;анизма, при этом срабатывае чик 12, е вькода которого си ч единичного уровня поступает (здноврименно г5рас:Ы1К1я коп, л ( вниз в узле памяти; 19, Новый код дрижепия 5 поступпи i с: выходов узла 17 в зе,п 1 9 г м тi с;оответствует движению ь-азад Г1еремеще п1го катод ой штанги ni i зонтальному транспор :еру 8 в ы т и л ей ИИ к линии, захваты aBii, ei тора 2, При срабатыван;1и датч 1анятости поз1-:ции сигнал, пос sn ci него на логический блок 15 i i s лает код дв 1жения в узле 19 па ть и устанавл гваст узел neiimiii т ч и новое состояние, соответстч iii iianpery всякого дникения, Km т оператор 2 по,днимеет штангу j т i ми и переноси т ее ка гальван ч t инию для обработки, триггер ni -:ия автооператора перебрасыв с i п другое состояние и дешифра.пр г С1чередной раз вырабатывает к in i г:рещающий всякое ДБИл;рние, ПР ч ;е автооператора низом за си ; штапгой действия рсех механи i ;„ ,Т|ОГИческих схем псстоояются ,
р.
случае разгрузки ,звтс;о 10
гГ. -ратор опускав И1тангу с го;озь:ми деталями на свободную левую позмдию г;; ризонтального транспортера, ;ia lix::-дах узла 17 при этом присутс гвусткомбинация сигналов5 гфи которой дешифратор выдает код движения транспортера от nr-iHHHj, и штанга 3 занимает гфавую позицию около вертикально|го элеватора 9„ При срабатывании пра-Boio датчика 12 занятости гюзип,ии г;вижение транспортера прекращается , Появившаяся овая кэмбинац}тя сигнало;; и м i TL н i i i f i и 11. ii i t i f i i i i
фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автооператором химико-гальванической линии | 1981 |
|
SU966667A1 |
| Устройство для управления автооператорами автоматической линии | 1976 |
|
SU616610A1 |
| Устройство для управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1095136A1 |
| Устройство для программного управления | 1982 |
|
SU1067470A1 |
| Устройство для программного управления автооператорами гальванической линии | 1979 |
|
SU857935A1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1981 |
|
SU1003023A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| Устройство для управления автома-ТичЕСКиМи лиНияМи | 1979 |
|
SU840804A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |
| УСТРОЙСТВО ПОКАЧИВАНИЯ ШТАНГ АВТООПЕРАТОРОМ ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 1991 |
|
RU2008371C1 |
АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ НАНЕСЕНИЯ ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ, содержащая ряд ванн, расположенных по ходу технологического процесса, автооператор 5 катодные штанги, командоаппарат с датчиками номеров ванн и датчиками положения автооператора, а также загрузочно-разгрузочный механизм, выполненный в виде последовательно расположенных двухцепного горизонтального транспортера и прш-1Ыкающего к нему дв кцепного вертикального элеватора, о т л и ч а ю щ а я - с я тем, что, с целью повыгиения надежности, горр зонтальньп транспортер снабжен дaтчикa И занятости позипий, кокандоаппарат снабжен логическим блоком управления загрузочно-разгрузочным механизмом, а вертикальнь:й элеватор - датчиком занятости первой позиции и датчиком занятости последней позиции, причем первый датчик занятостр позиции соединен с первым входом логического блока, второй датчик занятости позиции соединен со вторым входом логического блока, третий и четвертый входы которое S го соединены соответственно с датчиком номера загрузочно-разгруз очной позиции и датчиком положения автооператора вверх, а датчики занятости в|К5Егэ flsiiire первой и последней позиций подключены соответственно к пятом% и шестому входам логического блока. 2ГЗГЯ Р
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| КОНВЕЙЕР ДЛЯ ЛИНИЙ ГАЛЬВАНИЧЕСКИХ ПОКРЫТИЙ | 0 |
|
SU248417A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
