2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения упреждающей защиты прокатной клети от аварий и предотвращения перегрузок при резко изменяющихся давлениях, каждый из двух блоков разгрузки снабжен золотником, гидравлически соединенным с полостью внутри корпуса блока разгрузки.
3.Устройство по пп. 1 и 2, отличающееся тем, что каждый из двух блоков разгрузки снабжен соленоидом, механически соединенным с золотником.
4.Устройство по пп. 1-3, отличающееся тем, что оно снабжено элементом сравне1
Изобретение относится к прокатному производству, точнее к регулирующим устройствам прокатных станов, и может быть ис- юльзовано при прокатке металлов, а также других листовых материалов.
Целью изобретения является увеличение скорости срабатывания при резких динамических перегрузках, обеспечение упреждающей защиты прокатной клети от аварий и предотвращение перегрузок при резко изме- няющихся давлениях.
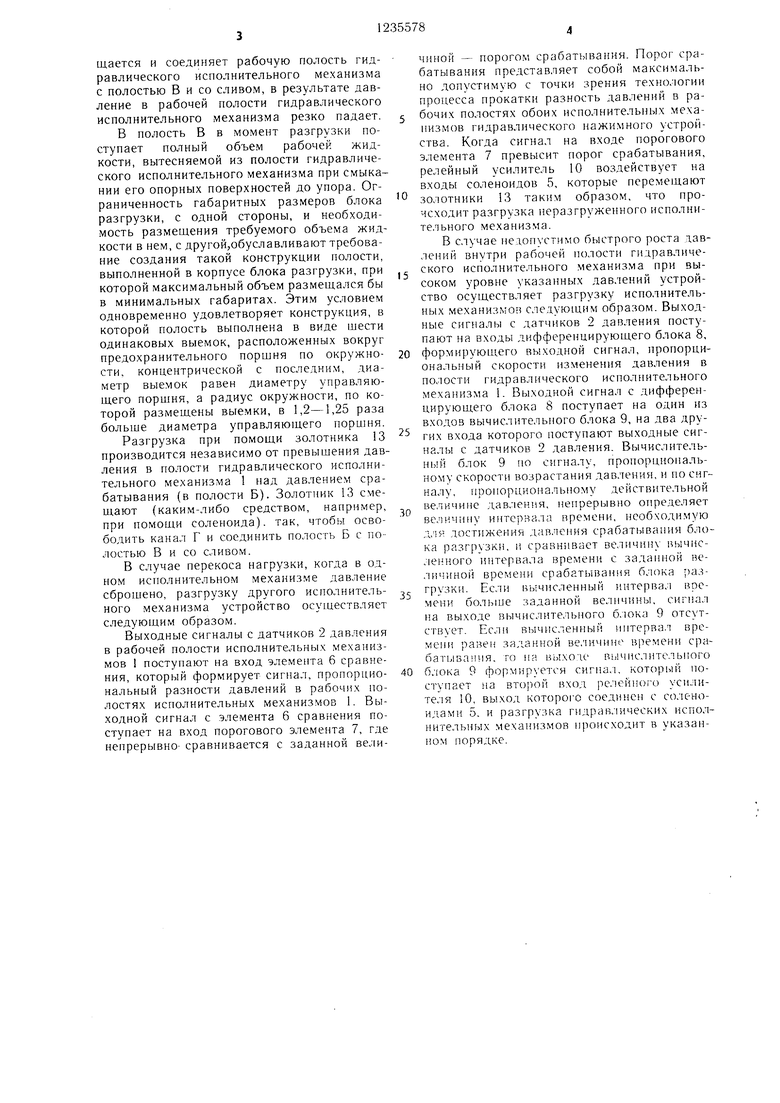
На фиг. 1 схематически изображено гидравлическое нажимное устройство прокатного стана; на фиг. 2 - блок разгрузки, разрез; на фиг. 3 - разрез А-А на фиг. 2.
Устройство состоит из двух гидравличе- ских исполнительных механизмов 1, двух датчиков 2 давления, входы каждого из которых соединены с рабочей полостью соответствующего исполнительного механизма 1, двух блоков 3 разгрузки, каждый из которых подсоединен к одному из двух исполнительных механизмов 1 и содержит корпус 4 и соленоид 5, элемента 6 сравнения, дза входа которого соединены с выходами датчиков 2 давления, порогового элемента 7, вход которого.; соединен с выходом элемента 6 сравнения, Дифференцирующего блока 8, входы которого соединены с выходами датчиков 2 давления, вычислительного блока 9, один вход которого соединен с выходом дифференцирующего блока 8, два дру- гих входа соединены с выходами датчиков 2 давления,релейного усилителя 10, входы которого соединены с выходом порогового элемента 7 и с выходом вычислительного блока 9, а выход соединен с входом каждого из двух соленоидов 5.
Блок 3 разгрузки включает корпус 4, соле- ноид 5, предохранительный поршень 11, запирающий рабочую полость исполнитель
ния, nopcjroBbiM элементом, дифференцирующим блоком, вычнслите, б. шком и релейным усилителем, приче.м выходы датчиков даЕ)ления соединены с двумя входами элемента сравнения, дифференцирующего и вычислительного блоков, выход дифференцирующего блока соединен с третьим входом вычислительного блока, выход которого соединен с одним из входов релейного усилителя, выход элемента сравнения соединен с входом порогового устройства, выход которого соединен с другим входом релейного усилителя, выход которого соединен с каждым из двух соленоидов, управляющих блоками разгрузки.
s о
5
0
механизма 1, управляющий порщень 12, гидравлически связанный с предохранительным поршнем 11, золотник 13. механически соединенный с соленоидом 5.
Устройство работает следуюи1им образом.
Когда давление в рабочей полости гидравлического исполнительного механизма 1 не превышает допустимого, предохранительный поршень 11 запирает рабочую полость гидравлического исполнительного механизма, и последний находится в обычном )а- бочем режиме.
При этом давление в полости Б поддерживается постоянным, равным заданному давлению срабатЕявания блока разгрузки, полость В соединена со сливом, и полости Б и В разъединены, так как клапан, находящийся на конце штока управляющего поршня 12, закрыт, а золотник 13 закрывает канал Г, соединяющий полости Б и F между собой.
Если давление в рабочей полости сидрав- лического исполнительного механизма превысит допустимое, то блок разгрузки срабатывает в сле.чую-пгем порял.ке. Как т о.шко под действием давления в рабочей полости гидрав.тического исполнительного механизма, презып,)ающе1 о давление срабатывания (давление в полости Б), предохранительный поршень 1 i (л ой.ает от седла, клапан ня конце управляю1цего поршня 12 также отойдет от своего седла и полость Б соединится с полостью В, а значит и со сливом. Это приведет к резкому падению давления в по чости Б и тем самым к резкому увеличению перепада давлений на предохранительном поршне 11 и, следовательно, усилия, действующего на предохранительный поршень 11 со стороны рабочей полости гидравлического исполнительного меха}1изма. Под действием этого усилия предохранительный поршень i I резко смещается и соединяет рабочую полость гидравлического исполнительного механизма с полостью В и со сливом, в результате давление в рабочей полости гидравлического исполнительного механизма резко падает.
В полость В в момент разгрузки поступает полный объем рабочей жидкости, вытесняемой из полости гидравлического исполнительного механизма при смыкании его опорных поверхностей до упора. Ограниченность габаритных размеров блока разгрузки, с одной стороны, и необходимость размещения требуемого объема жидкости в нем, с другой,обуславливают требование создания такой конструкции полости, выполненной в корпусе блока разгрузки, при которой максимальный объем размещался бы в минимальных габаритах. Этим условием одновременно удовлетворяет конструкция, в которой полость выполнена в виде щести одинаковых выемок, расположенных вокруг предохранительного порщня по окружности, концентрической с последним, диаметр выемок равен диаметру управляющего поршня, а радиус окружности, по которой размещены выемки, в 1,2-1,25 раза больше диаметра управляющего поршня.
Разгрузка при помош,и золотника 13 производится независимо от превышения давления в полости гидравлического исполнительного механизма 1 над давлением срабатывания (в полости Б). Золотник 13 смещают (каким-либо средством, например, при помощи соленоида), так, чтобы освободить канал Г и соединить полость Б с полостью В и со сливом.
В случае перекоса нагрузки, когда в одном исполнительном механизме давление сброшено, разгрузку другого исполнительного механизма устройство осуществляет следующим образом.
Выходные сигналы с датчиков 2 давления в рабочей полости исполнительных механизмов 1 поступают на вход элемента 6 сравнения, который формирует сигнал, пропорциональный разности давлений в рабочих полостях исполнительных механизмов 1. Выходной сигнал с элемента б сравнения поступает на вход порогового элемента 7, где непрерывно сравнивается с заданной вели5
ЧИНОЙ - порогом срабатывания. Порог срабатывания представляет собой максимально допустимую с точки зрения технологии процесса прокатки разность давлений в ра- 5 бочих полостях обоих исполнительных механизмов гидравлического нажимного устройства. Когда сигнал на входе порогового элемента 7 превысит порог срабатывания, релейный усилитель 10 воздействует на входы соленоидов 5, которые перемещают
золотники 13 таким образом, что происходит разгрузка неразгруженного исполнительного механизма.
В случае недопустимо быстрого роста давлений внутри рабочей полости гидравлического исполнительного механизма при высоком уровне указанных давлений устройство осуществляет разгрузку исполнительных механизмов следующим образом. Выходные сигналы с датчиков 2 давления поступают на входы дифференцирующего блока 8,
0 формирующего выходной сигнал, пропорциональный скорости изменения давления в полости гидравлического исполнительного механизма 1. Выходной сигнал с дифференцирующего блока 8 поступает на один из входов вычислительного блока 9, на лТ.ва других входа которого поступают выходные сигналы с датчиков 2 давления. Вычислите, ный блок 9 по сигналу, пропорциональному скорости возрастании давления, и по сигналу, пропорциональному действительной величине давления, непрерывно определяет величину интервала времени, необходимую для достижения давления срабатывания блока разгрузки, и сравнивает величину вычисленного интервала времени с заданной величиной времени срабатывания блока разгрузки. Если вычисленный ннтерва. времени больше заданной величины, сигнал на выходе вычислительного блока 9 отсутствует. Если вычисленный интервал времени равен заданной ве.чичине времени срабатывания, го на выходе вычислительного
0 9 формируется сигнал, который поступает яа второй вход рс.чейного си.ли- те. ш 10, выход которого соединен с соленоидами 5. и разгрузка гидрав.мических исполнительных механизмов происходит в указанном порядке.
5
0
5
Ош систень/ ли/тюния
Д-А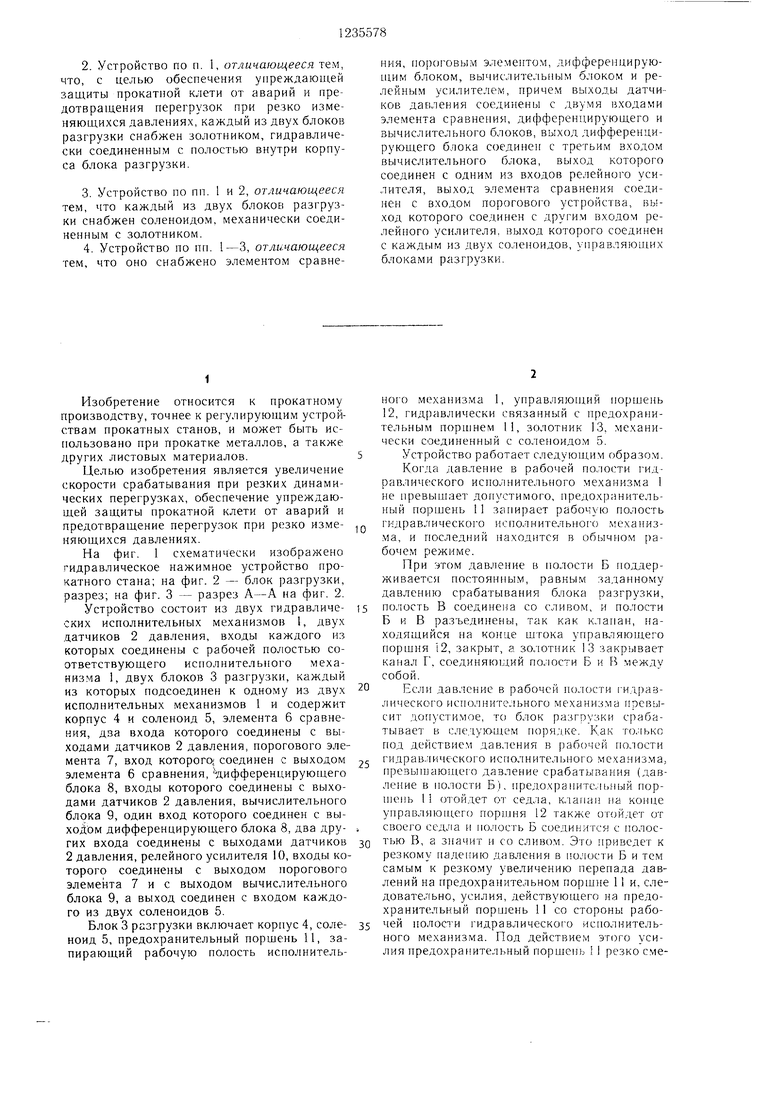

| Гидравлический исполнительный механизм для прокатной клети | 1981 |
|
SU997874A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Проспект фирмы Bliss США, 1977. | |||
