1
Изобретение относится к машиностроению, а именно к точному приборостроению и станкостроению, в частности к плоским шарнирно-рычажным меха-, низмам, и может быть использовано, например, в узлах сканирования и анализа микрообъектов и их изображений на различных оптико-механических и оптико-электронных приборах, а также в узлах микроподач прецизионных станков.
Цель изобретения - повышение точности и быстродействия механизма за счет передачи движения непосредственно от промежуточного звена к ведомому и упрощение конструкции за счет уменьшения количества звеньев.
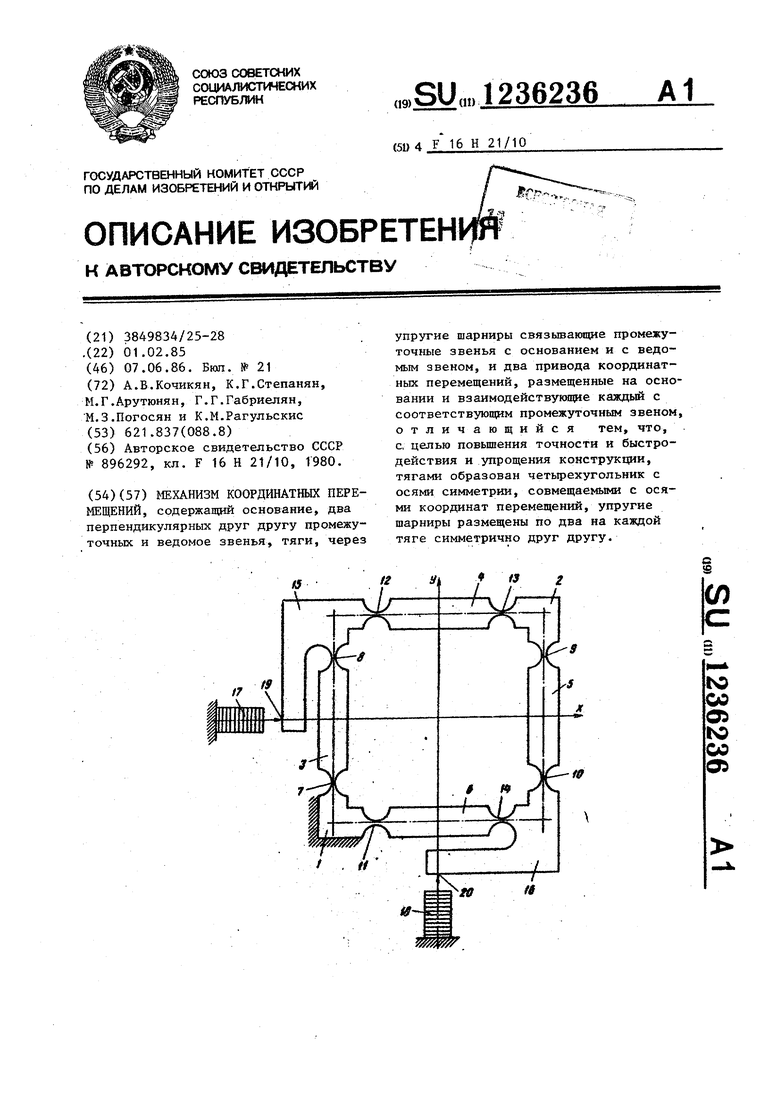
На чертеже показана кинематическая схема механизма.
Механизм содержит основание 1, ведомое звено 2, четыре тяги 3-6, расположенные в виде прямоугольника, оси симметрии которого совмещены с осями X и У координатных перемещений, и размещенные по два на каждой тяге упругие шарниры 7-10 и 11-14. Шарниры 7-10 параллельных тяг 3 и 5 расположены симметрично относительно оси У, а шарниры 11-14 параллельных тяг 4 и 6 расположены симметрично относительно оси X.
Механизм содержит также два проме- жуточньк звена 15 и 16, перпендикулярных одно другому. Звено 15 связано с ведомым звеном 2 тягой 4 и с основанием 1 - тягой 3, а звено 16- соответственно тягами 5 и 6. РазмеРедактор Е.Папп Заказ 3076/39
Составитель В.Савицкий
Техред М.Ходанич Корректор И.Макеимишинец
Тираж 880 . Подписное ВНИИПИ Государственного комитета СССР
. по делам изобретений и открытий 113035, Москва, Ж-33, Раутпская наб., д. 4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
,
10
2362361
щенный на основании 1 привод 17 координатных перемещений по оси X взаимодействует с промежуточным звеном 15, а такой же привод 18 перемещений по оси У взаимодействует с промежуточным звеном 16. Узлы 19 и 20 присоединения приводов 17 и 18 к звеньям 15 и 16 размещены каждьй на соответствующей координатной оси, что обеспечивает плоскопараллельное перемещение звена 2.
Шарниры 7-10 выполнены с возможностью смещения только по оси X, а шарниры 11-14 - только по оси У. Та- 15 КИМ образом, тяги 3-6 образуют два шарнирных параллелограмма, ограниченные шарнирами 7-8-9-10 и 11-12-13-14
Механизм раёотает следующим образом.
При включении, например,.привода 17 развиваемое им усилие через пром жуточное звено 15 сообщает движение тягам 3 и 5, которые поворачиваются на шарнирах 7 и 10. При этом тяга 4 и вместе с ней звено 2 совершают плоскопараллельное движение вдоль оси X.
При включении привода 18 аналогичным образом тяги 4 и 6 поворачиваются на шарнирах 11 и 12, а тяга 5 и звено 2 совершают плоскопараллельное движение вдоль оси У.
20
25
30
35
При совместной работе приводов 17 и 18 звено 2 совершает плоскопараллельное движение по заданной траектории и в заданную точку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм координатных перемещений | 1980 |
|
SU896292A1 |
| Механизм угловых координатных перемещений | 1985 |
|
SU1312287A1 |
| Направляющий механизм Савицкого | 1988 |
|
SU1576749A1 |
| Чертежный станок | 1986 |
|
SU1553043A1 |
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| Центрифуга с вибрационной выгрузкой осадка | 1986 |
|
SU1311782A1 |
| МЕХАНИЗМ ПРИВОДА ПЕРЕДНИХ СТВОРОК НИШИ ШАССИ САМОЛЕТА | 2010 |
|
RU2427502C1 |
| СПОСОБ ПОЛУЧЕНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ, СПОСОБ ПРЕОБРАЗОВАНИЯ НАПРАВЛЕННЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ В ОДНОНАПРАВЛЕННОЕ ПРЕРЫВИСТОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ, СПОСОБ УПРАВЛЯЕМОГО ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА В ЗАДАННОМ НАПРАВЛЕНИИ И УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2004 |
|
RU2280513C2 |
| ПРОСТРАНСТВЕННЫЙ РЫЧАЖНЫЙ РЕГУЛИРУЕМЫЙ МЕХАНИЗМ | 2002 |
|
RU2207461C1 |
| Механизм координатных перемещений | 1980 |
|
SU896292A1 |
