(54) МЕХАНИЗМ КООРДИНАТНЫХ ПЕРЕМЕЩЕНИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм угловых координатных перемещений | 1985 |
|
SU1312287A1 |
| Механизм координатных перемещений | 1985 |
|
SU1236236A1 |
| Рычажный механизм для параллельного перемещения и поворота горизонтально расположенной пластины | 1978 |
|
SU949256A1 |
| Двухкоординатный стол | 1979 |
|
SU781008A1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1613321A2 |
| УНИВЕРСАЛЬНЫЙ СТЕРЕОФОТОГРАММЕТРИЧЕСКИЙ | 1973 |
|
SU382919A1 |
| Бесканатная подъемная установка | 1971 |
|
SU482379A1 |
| Пространственный механизм | 1989 |
|
SU1703443A1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ, СОВМЕЩЕНИЯ И ПОЗИЦИОНИРОВАНИЯ | 2000 |
|
RU2160884C1 |
| Механизм подачи | 1987 |
|
SU1428882A1 |
1
Изобретение относится к машиностроению, а, именно к точному приборостроению и станкостроению, в частности к плоским шарнирным механизмам, и может быть использовано в устройствах сканирования и анализа микрообъектов или их изображений различных оптико-механических и оптикоэлектронных приборов, например в узлйх координатного столика контрольно-измерительных приборов, предметного столика биологических микроскопов, в узлах высокоточных координатных микроперемещений и микроподач прецизионных металлорежущих станков, микроманипуляторов.
Известен механизм координатных перемещений, содержащий основание, ведомое звено, промежуточное звено, шарнирно связанное одной парой тяг с основанием, а другой парой тяг - с ведомым звеном, и связанные с одним из звеньев приводные устройства по каждой коодинате. Приводные устройства установлены непосредственно на одном из звеньев механизма - промежуточном или ведомом 1
Недостаток этого механизма заключается в том, что он имеет низкие динамические и эксплуатационные характеристики, обусловленные тем, что приводные и при необходимости отсчетно-измерительные устройства, по крайней мере, по одной координате должны быть установлены на одном из звеньев механизма - на промежуточном или ведомом звене, что приводит к увеличению масс подвижных частей, и вследствие этого, снижению динамических характеристик меха низма, причем вес и габариты приводных устройств могут в несколько раз превосходить аналогичные параметры самого механизма (например, в случае автоматизированного -предметного столика биологических микроскопов}, это особенно сильно проявляется в механизмах, предназначенных для сканирующих и анализирующих устройств оптикоэлектронных приборов, где требуются высокие скорости и частоты сканирования неидентичности динамических характеристик по разным координатам вследствие разности подвижных масс по этим координатам. Кроме того, подвижные кабельные и т.п. коммуникации при подвижном приводе и отсчетно-измерительном устройстве (при
20 его наличии) создают серьезные эксплуатационные неудобства и снижают надежность конструкции механизма в целом. Этот недостаток наиболее сильно проявляется при больших ходах механизма.
Цель изобретения - повышение динамических и эксплуатационных характеристик механизма.
Указанная цель достигается тем, что механизм координатных перемещений, содержащий основание, ведомое звено, промежуточное звено, шарнирно связанное одной парой тяг с основанием, а другой парой тяг - с ведомым звеном, и приводные устройства по каждой координате, снабжен вторым промежуточным звеном и дополнительными двумя взаимно перпендикулярно расположенными парами тяг, одна из которых шарнирно связана со вторым промежуточным звеном и основанием, другая - шарнирно связана со вторым промежуточHhjiM и ведомым звеньями, а приводные устройства по каждой координате связаны с соответствующим промежуточным звеном, установлены на основании и жестко с ним связаны.
При этом промежуточные звенья выполнены в виде расположенных одна в другой крестовин.
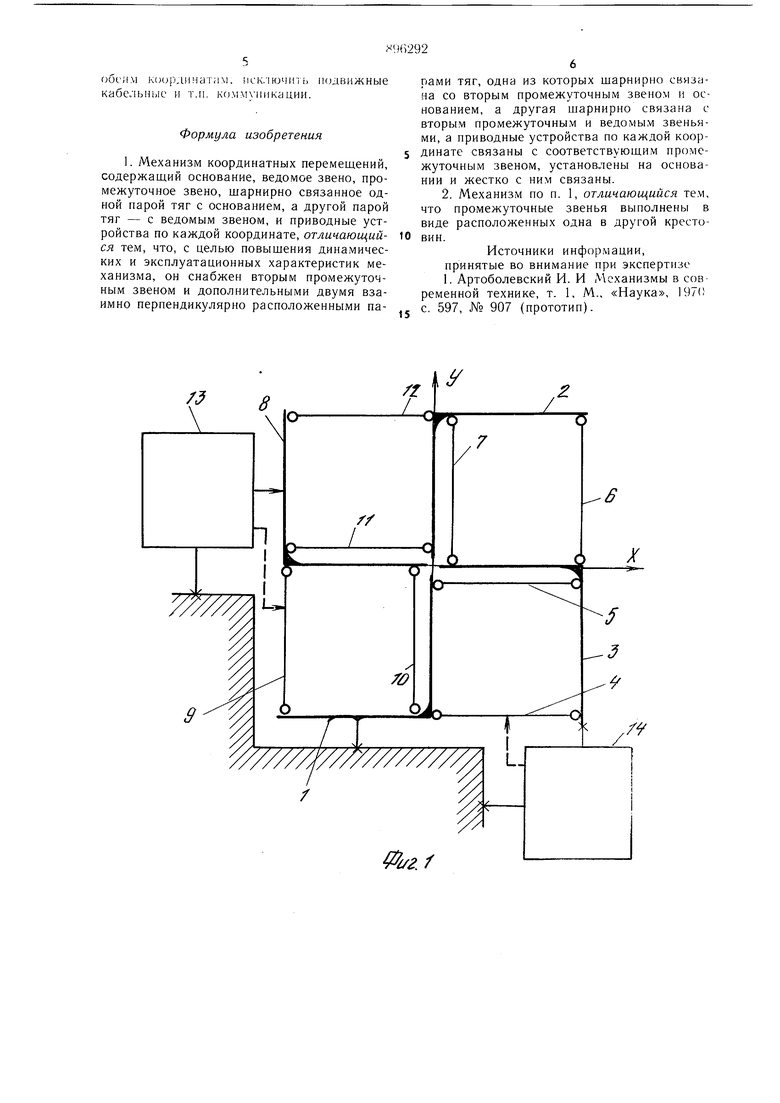
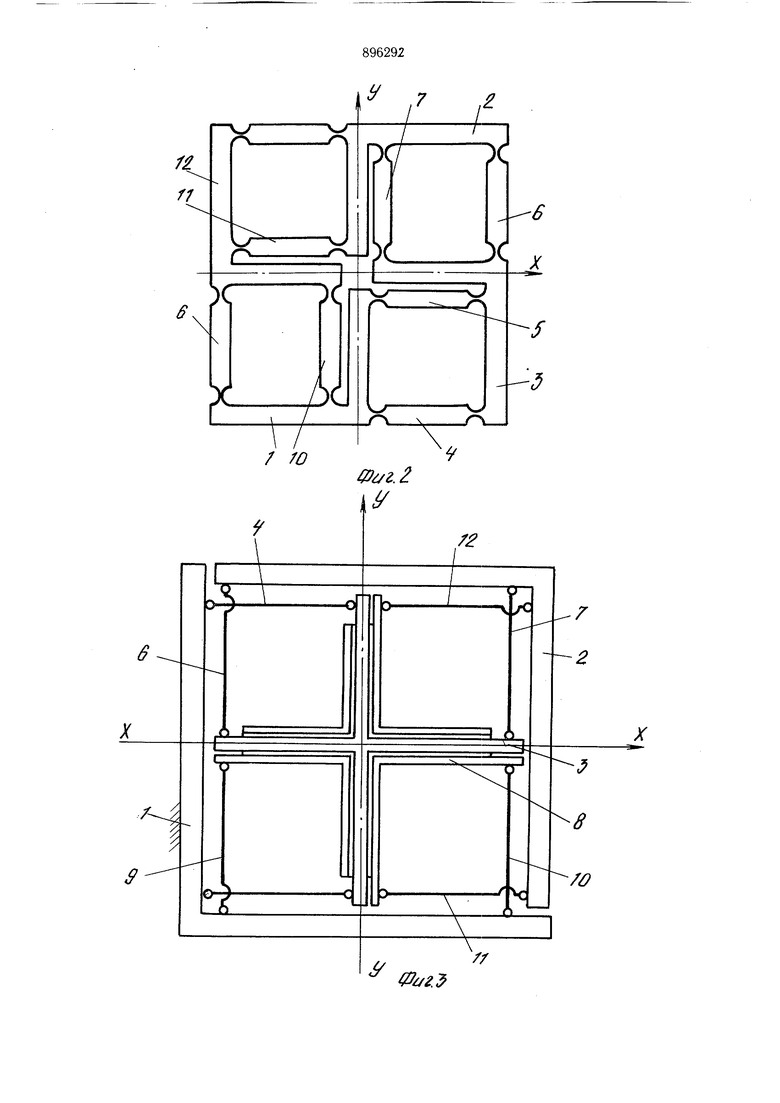
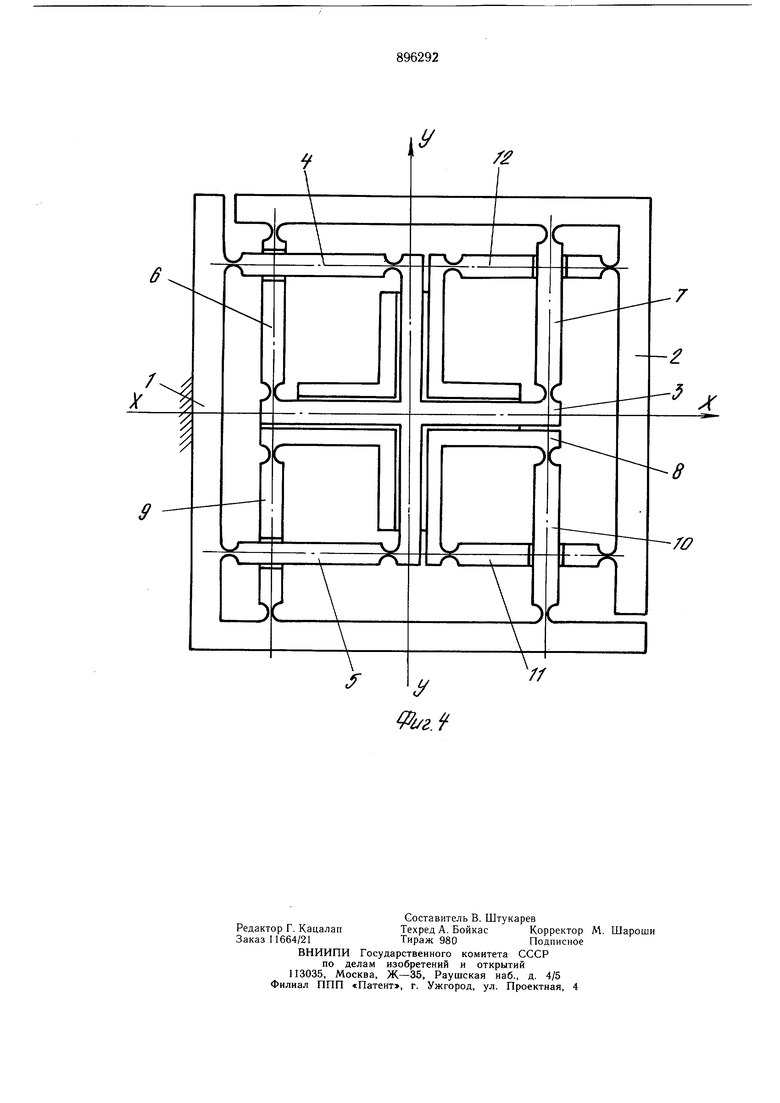
На фиг. 1 представлена кинематическая схема предлагаемого механизма; на фиг. 2 вариант конструктивного исполнения, предназначенный для использования в узлах прецизионных микроперемещений по двум координатам; на фиг. 3 - кинематическая схема варианта исполнения механизма; на фиг. 4 - конструктивная схема варианта исполнения, предназначенного для прецизионных микроперемещений по двум координатам.
Механизм содержит основание 1, ведомое звено 2, промежуточное звено 3, шаркирно связанное одной парой тяг 4 и 5 с основанием 1, а другой парой тяг 6 и 7 - с ведомым звеном 2. Механизм снабжен вторым промежуточным звеном 8 и дополнительными двумя взаимно перпендикулярно расположенными парами тяг 9 и 10 и 11 и i2. одна из которых - (9 и 10) - шарнирно связана с вторым промежуточным звеном (S и основанием 1, а другая пара тяг (11 и 12) шарнирно связана с вторым промежуточным звеном 8 и ведомым звеном 2.
Механизм содержит также приводные устройства 13 и 14 по каждой координате, связанные с соответствующим промежуточным звеном 8 и 3, установленные на основании 1 и жестко с ним связанные. При этом промежуточные звенья 3 и 8 выполнены в виде расположенных одна в другой крестовин.
Основание 1, промежуточные звенья 3 и 8, ведомое звено 2 и соответствующие пары тяг 4 и 5, 6 и 7, 9 и 10 и И и 12 образуют два идентичных двойных щарнирных параллелограмма. По кинематическим цепям этих параллелограммов осуществляется передача по двум координатам X и У ведомому звену перемещений и тяговых усилий, развиваемых соответственно приводными устройствами 13 и 14. Указанные двойные параллелограммы повернуты один относительно другого на yio.i 90°.
Предлагаемый механизм обладает двумя степенями свободы
W 2,n-2P5 , где W -степень подвижности механизма;
h - число подвижных звеньев;
Р -число кинематических пар 5-го
класса.
В данном случае п 10, 1 14, W 3-102-14 2.
Вариант конструктивного исполнения механизма, представленный на фиг. 2, отличается тем, что он выполнен исключительно на упругих щарнирах и изготовлен из одного куска материала. Механизм предназначен для использования в сочетании с пьезоэлектрическими приводами дискретного действия в узле предметного столика автоматизированного биологического микроскопа.
Механизм работает следующим об разом.
Перемещение и тяговое усилие, развиваемое приводным устройство.м 14, сообщаются промежуточному звену 3 непосредственно или чере; т/п м 4 и 5. Далее посредством шарнирных гиг 6 и 7 - ведомому звену 2. В результат vroro ведомое звено 2 получает перемещение вдоль оси У. При этом щарнирные тяги 4, 5 и 11, 12 поворачиваются на некоторый угол д , определяемый из соотнощения уд
где V ь перемещение ведомого звена 2
вдоль оси У;
т -длина щарнирных тяг 4, 5 и 1 12. Так как механизм предназначен для осуществления сравнительно малых перемец.ений, с достаточной для практики точностькможно принять
frЧерез промежуточное звено 8 и пару щарнирных тяг 11 и 12 аналогичным образом осуществляется передача перемешсчий и тяговых усилий по координате X, f ;визаемых приводным устройством 13.
Угол поворота тяг 6, 7 и 9, 10 опр- еляется из аналогичного соотнощения
.,
где Xj - перемещение ведомого звена
вдоль оси X; -г -Д1ина шарнирных тяг 6, 7 и 9, 10.
Использозание изобретения позволяет приводные и отсчетно-измерительные устройства по обеим координатам неподвижно установить на основании и, тем самым уменьшить массу подвижных частей; обеспечить идентичность характеристик механизма по
обеим ко(|:л11нат;1М. 1ск.1юч1П ь пс лвижные кабе;1ьиыс и тл. коммхпикации.
Формула изобретения
Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И Л сханизмы в сов ременной технике, т. 1, М., «Наука, 197(/ с. 597, № 907 (прототип).
/J
/
/ w
.1
