строении и в приборострое гаи. Цель изобретения - повышение надежности и долговечности механизма за счет переноса приводов-и отсчетных устройств с подвижных звеньев на основание. Ведомое звено 4 связано с основанием 1 тремя кинематическими цепями, каждая из котррых включает в себя Г-образный или полукруглый кривошип 5 и Г-образный или полукруглый шатун 6 связанный со звеном 4 шарниром 7 и с кривошипом 5 шарниром 8, Кривошип 5 и шатун 6 расположены так, что ось вращения кривошипа 5 совмещена с какой-либо координатной осью неподвижной системы координат, совмещенной с основанием 1, ось шарнира 8 - с другой коорди1
Изобретение относится к машиностроению, а именно к механизмам угловых координатных перемещений, и может быть использовано в точном машиностроении и в приборостроении.
Цепь изобретения - повьш1ение надежности и долговечности механизма за счет обеспечения возможности неподвижной установки приводных и отсчетных устройств всех трех осей на основании.
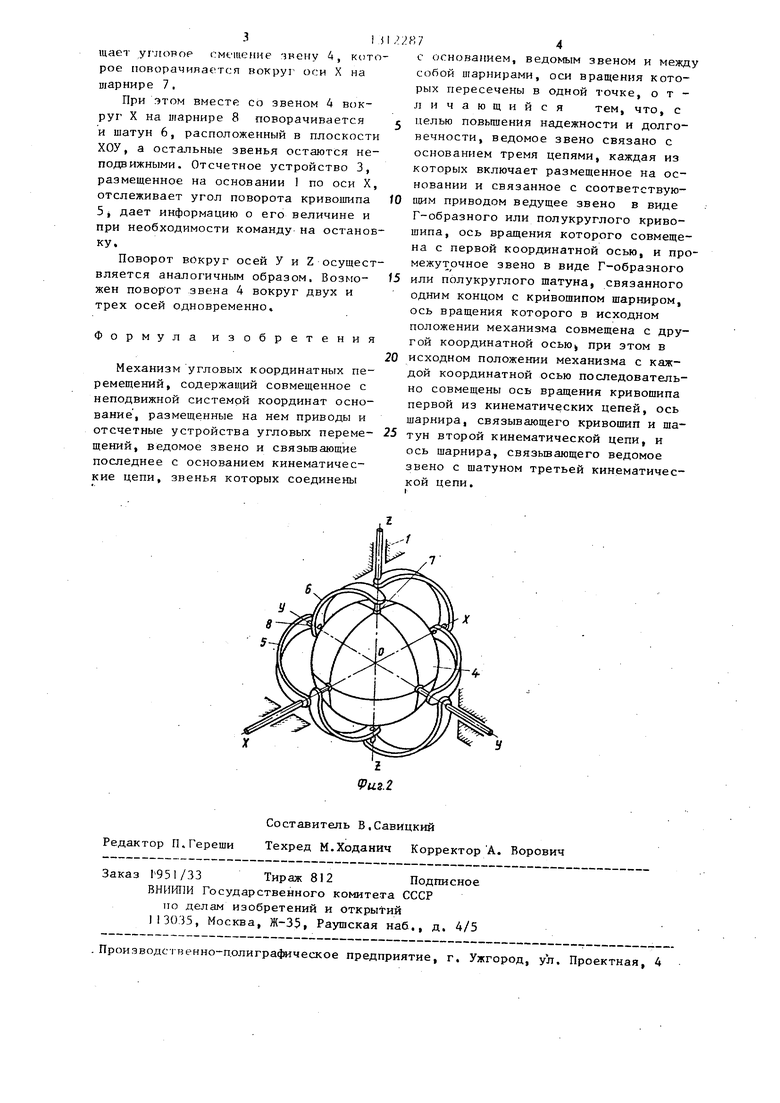
На фиг,1 показана кинематическая схема механизма; на фиг,2 - конструктивная схема механизма, сферический вариант.
Механизм содержит основание 1, размещенные на нем приводы 2 и от- счетные устройства 3 угловых перемещений, ведомое звено 4 и три кинематические цепи, включающие в себя каждая Г-образный или полукруглый кривошип 5, взаимодействуюш 1й с соот ветств ующими приводом 2 и отсчетным устройством 3., Г-образный или полукруглый шатун 6, связанный шарниром 7 с ведомым звеном 4 и шарниррм 8 с кривошипом 5 одной из двух остальных кинематических цепей. Кривошипы 5 и шатуны 6 каждой кинематической цепи расположены так, что в исходном положении механизма, ось вращения
натной осью и ось шарнира 7 - с третьей координатной осью, При повороте кривошипа 5 он через шатун 6 и шарниры 7 и 8 сообщает движение звену 4, поворачивающегчуся на шарнире 7 шатуна .6 другой кинематической цепи, расположенном на одной оси с кривошипом 5, Шатун 5 третьей кинематической цепи поворачивается вместе со звеном 4, остальные звенья неподвижны. На каждой координатной оси последовательно размещены ось вращения кривошипа 5 одной кинематической цепи, ось шарнира 8 другой кинематической цепи и ось шарнира 7 третьей кинематической цепи. Возможен одновременный поворот ззена 4 вокруг двух или трех координатных осей, 2 ил.
кривошипа 5 совмещена с одной из трех координатных осей неподвижной системы координат, совмещенной с основанием 1, ось шарнира 8, связьшающего
шатун 6 и кривошип 5 другой кинематической цепи, совмещена с другой координатной осью и ось шарнира 7, связывающего шатун 6 с ведомым звеном 4, совмещена с третьей координатной
осью.
На каждой координатной оси последовательно размещены кривошип 5, сообщающий ведомому звену 4 поворот вокруг этой оси, шарнир 8, связьшающий
кривошип 5 и изатун 6 второй кинематической цепи, и шарнир 7, связываюший ведомое звено 4с шатуном 6 третьей кинематической цепи. Оси вращения всех шарниров пересечены в одной точке, совмещенной с центром системы координат,
Механизм работает следующим образом.
Пусть, например, требуется звено 4 повернуть на некоторый угол вокруг оси X, Дпя этого включают соответствующий привод 2,. приводящий в движение кривошип 5, ось вращения которого совмещена с осью X. Этот кривошип 5 через шарниры В и 7 шатуна 6, расположенного в плоскости YOZ, сооб31
щает yfjiopop смещение чнену 4, которое поворачияается вокруг оси X на шарнире 7,
При этом вместе со звеном 4 вокруг X на шарнире 8 поворачивается и шатун 6, расположенный в плоскости ХОУ, а остальные звенья остаются неподвижными. Отсчетное устройство 3, размещенное на основании 1 по оси X, отслеживает угол поворота кривошипа 5 i дает информацию о его величине и при необходимости команду на остановку.
Поворот вокруг осей У и Z осуществляется аналогичным образом. Возможен поворот звена 4 вокруг двух и трех осей одновременно.
Формула изобретения
Механизм угловых координатных перемещений, содержащий совмещенное с неподвижной системой координат основание , размещенные на нем приводы и отсчетные устройства угловых перемещений, ведомое звено и связьшающие последнее с основанием кинематические цепи, звенья которых соединены
,14
с основанием, ведомым звеном и между собой шарнирами, оси вращения которых пересечены в одной точке, отличающийся тем, что, с
целью повышения надежности и долговечности, ведомое звено связано с основанием тремя цепями, каждая из которых включает размещенное на основании и связанное с соответствующим приводом ведущее звено в виде Г-образного или полукруглого кривошипа, ось вращения которого совмещена с первой координатной осью, и промежуточное звено в виде Г-образного
или полукруглого шатуна, связанного одним концом с кривошипом шарниром, ось вращения которого в исходном положении механизма совмещена с другой координатной осью при этом в
исходном положении механизма с каждой координатной осью последовательно совмещены ось вращения кривошипа первой из кинематических цепей, ось шарнира, связывающего кривошип и шатун второй кинематической цепи, и ось шарнира, связьшающего ведомое звено с шатуном третьей кинематической цепи.
7
Редактор П.Гереши
Составитель В,Савицкий
Техред М.Ходанич Корректор А. Ворович
Заказ Г951/33Тираж 812Подписное
ВННИ1Ш Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-долиграфическое предприятие, г. Ужгород, ул. Проектная, 4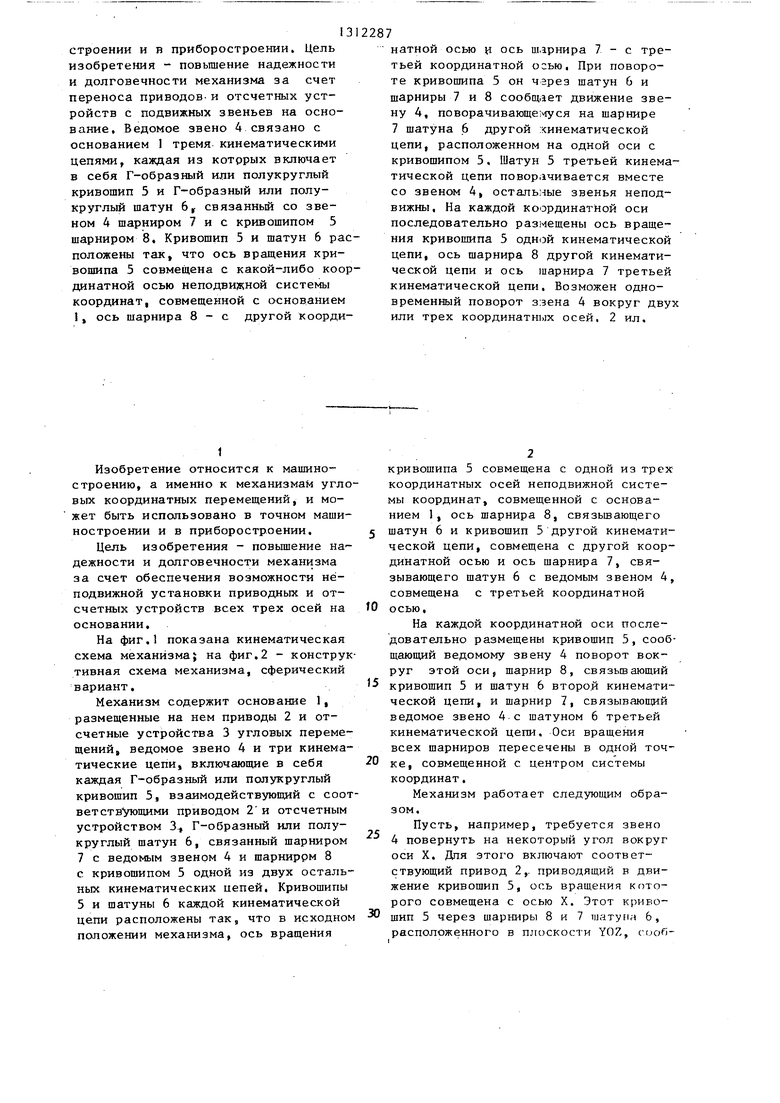
| название | год | авторы | номер документа |
|---|---|---|---|
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| Механизм координатных перемещений | 1980 |
|
SU896292A1 |
| Направляющий механизм | 1983 |
|
SU1116246A1 |
| Шарнирно-рычажный дифференциальный механизм И.Х.Файзиева | 1985 |
|
SU1370349A1 |
| ИНЕРЦИОННЫЙ ТРАНСФОРМАТОР МАТВЕЕВА | 2012 |
|
RU2526729C2 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНЫЙ МЕХАНИЗМ | 2007 |
|
RU2338104C1 |
| РЕГУЛИРУЕМЫЙ ЗУБЧАТО-РЫЧАЖНЫЙ ПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 2010 |
|
RU2440526C1 |
| Пространственный шарнирно-рычажный механизм | 1985 |
|
SU1421921A1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В КУЛИСНОМ МЕХАНИЗМЕ И КУЛИСНЫЙ МЕХАНИЗМ ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2133832C1 |
Изобретение относится к машиностроению, а именно к механизмам угловых координатных перемещений, и найдет применение в точном машиноФиг.1 (Л с со tSD 1C 00 
| Ракетная техника и космонавтика, 1968, № 3, с | |||
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
