Изобретение относится к машиностроению, а именно к направляющим механизмам для перемещения объекта по различным криволинейным траекториям, и может быть использовано в переналаживаемых устройствах для перемещения по заданной траектории обрабатывающего инструмента или рабочих органов контрольной и измерительной аппаратуры.
Цель изобретения - поыгаение быстродействия за счет иного выполнения направляющей.
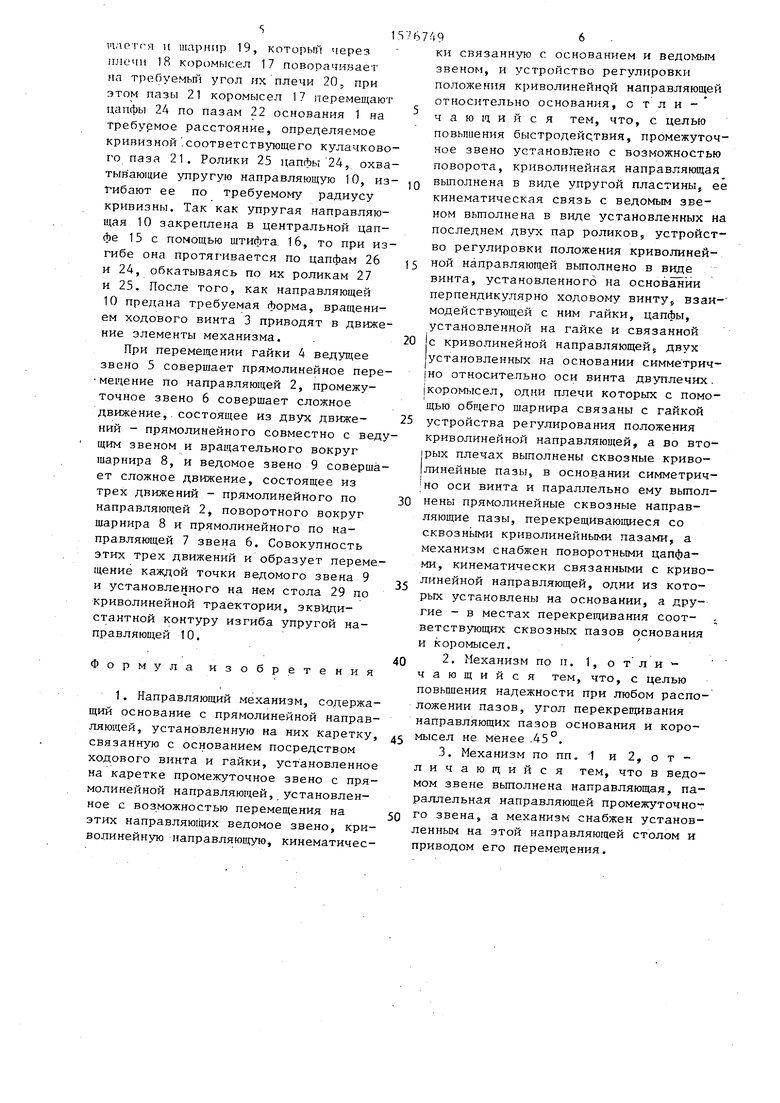
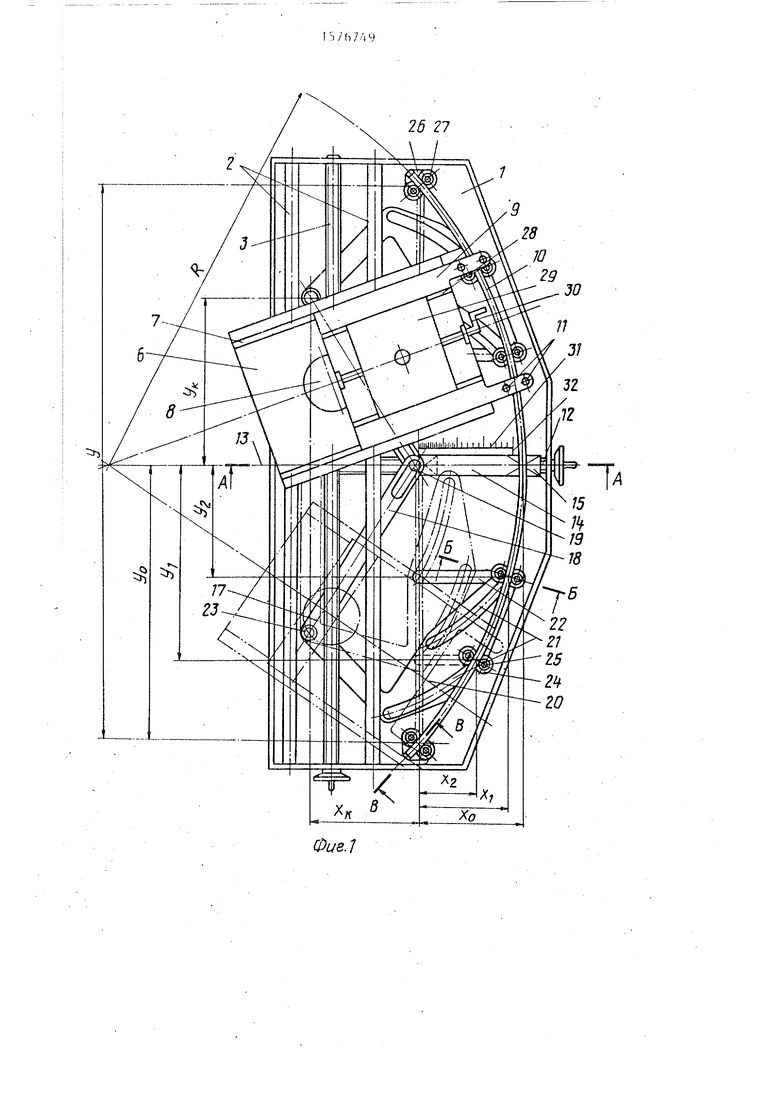
На фиг. 1 показана схема механизма с дугообразной направляющей; ча фиг. 2 - механизм с направляющей, имеющей прямолинейный участок; на
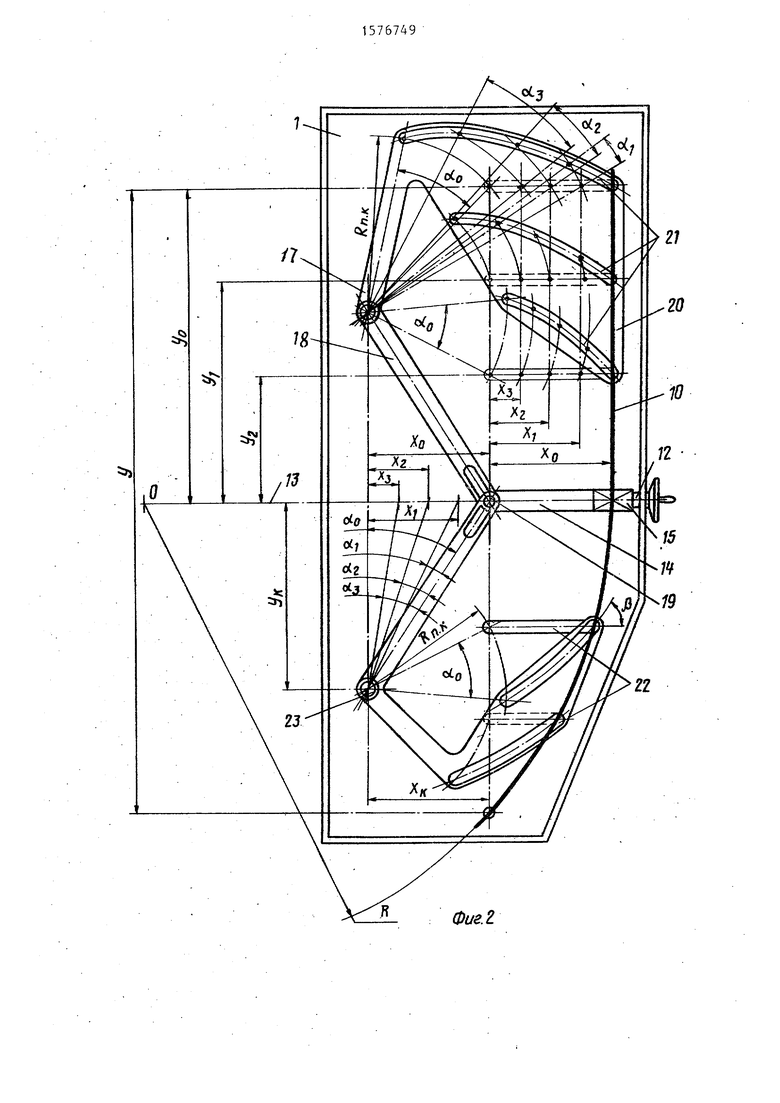
фиг. 3 - сечение А-А ча фиг. 1; на фиг. 4 - сечение Б-Б на Аиг.1; па фиг,5 - сечение В-В на фиг,1.,
Направляющий механизм содержит основание 1 с прямотинейной направляющей 2, ходовой винт 3, ось которо- гго параллельна направляющей 2, и гай- KV 4 s каретку 5, установленную на направляющей 2 с возможностью поступа1- тельного перемещения и жестко связанную с гайкой 4, промежуточное звено 6 с выполненной в чем прямолинейной направляющей 7, связанное с кареткой 5 с возможностью относительного поворота на шарнире 8, ведомое звено 9, установленное в направляющей 7 с возможностью поступательного перемещения,
СП -ч
оэ J
nU
315
и направляющую 10, выполненную в виде упругой пластины. На ведомом звене установлены две пары роликов 11, попарно охватывающих направляющую 10. На основании 1 расположено устройство регулировки положения направляющей, содержащее винт 12, установленный по оси 13 симметрии направляющего механизма перпендикулярно оси винта 3, взаимодействующую с ним гайку 14, цапфу 15, установленную на гайке 14, в прорези которой с помощью штифта 16 зафиксирована направляющая 10, Два симметрично установленные на осно- вании 1 двуплечие коромысла 17 имеют плечи 18, которые общим шарниром 19 связаны с гайкой 14. Во вторых плечах 20 коромысел 17 выполнены сквозные криволинейные пазы 21. В основании 1 симметрично и параллельно оси 13 симметрии выполнены прямолинейные сквозные направляющие пазы 22. Расположение осей 23 вращения коромысел 17 выбирают так, чтобы пазы 22 основания 1 и пазы 21 коромысел 17 при любом положении последних скрещивались под углом /3 45° (фиг.2). В местах перекрещивания пазов 21 коромысел 17 и пазов 22 основания 1 с возможностью перемещения установлены цапфы 24 с роликами 25, охватывающими упругую направляющую 10. Для уменьшения сил трения цапфы 24 перемещаются по пазам 21 и 22 на подшипниках качения (фиг. 4). Пазы 21 в каждом смежном Нлече 20 имеют требуемый контур.
Кроме того, на основании 1 могут быть установлены поворотные цапфы 26 с роликами 27, которые охватывают направляющую 10.
Для быстрой регулировки радиуса кривизны в небольших пределах в ведомом звене 9 выполнена прямолинейная направляющая 28, в которой с возможностью поступательного перемещения установлен стол 29 с его приводом перемещения в виде, например, винтового механизма 30.
Для контроля за настройкой механизма на требуемый радиус кривизны на основании 1 имеется шкала 31, указатель 32 которой закреплен на гайке 14. Г1кала 31 показывает величину X стрелы прогиба направляющей 10 в миллиметра
Профиль кулачковых пазов в плечах 20 коромысел 17 определяется по cbop- муле
R
Гп
Kj. (,
где R(nK;)j текущий радиус кулачкового паза (фиг. 2); X - расстояние от хорды изгиба упругой направляющей 10 (прямой, на которой расположены оси вращения крайних поворотных цапф) до осей вращения коцомы- сел 17 (конструктивная величина);
У„ - расстояние от оси 13 сим- i
метрии механизма до оси вращения коромысел 17 (конструктивная величина); Y, - расстояние от оси 13 симметрии до соответствующего направляющего паза в основании 1 (конструктивная величина);
0 5
с
0
5
0
0
5
YR -Y
- величина стрелы прогиба дуги упругой направляющей 10, соответствующей требуемому радиусу кривизны, траектории перемещения объекта;
R - требуемый радиус кривизны траектории перемещения объекта.;
v - половина длины хорды изгиба (расстояния между осями вращения крайних поворотных цапф Z6) упругой направляющей 10 (конструктивная величина);
о Х0arctg -X угол поворота коромысел 17 для изгиба упругой направляющей 10 до кривизны с минимальным радиусом R нМ (задается конструктивно); максимальная стрела прогиба упругой направляющей 10 (задается конструктивно) .
Универсальный направляющий механизм работает следующим образом.
Вращением винта 12 перемещают гайку 14 и закрепленную на ней цапфу 15 так, чтобы стрела прогиба X. упругой направляющей 10 соответствовала требуемому радиусу R- кривизны траектории перемещения объекта. Величину X.
контролируют по шкале 31 и ее указателю 32. Вместе с гайкой 14 переме I
I ueior и шарнир 19, который через ичочи 18 коромысеп 17 поворачивает на требуемый угол их плечи 20, при этом пазы 21 коромысел 1 перемещают цапфы 24 по пазам 22 основания 1 на требуемое расстояние, определяемое кривизной соответствующего кулачкового паза 21. Ролики 25 цапЛы 24, охватывающие упругую направляющую 10, изгибают ее по требуемому радиусу кривизны. Так как упругая направляющая 10 закреплена в центральной цапфе 15 с помощью штиЛта 16, то при изгибе она протягивается по цапфам 26 и 24, обкатываясь по их роликам 27 и 25. После того, как направляющей 10 предана требуемая форма, вращением ходового винта 3 приводят в движение элементы механизма.
При перемещении гайки 4 ведущее звено 5 совершает прямолинейное перемещение по направляющей 2, промежуточное звено 6 совершает сложное движение, состоящее из двух движений - прямолинейного совместно с ведущим звеном и вращательного вокруг шарнира 8, и ведомое звено 9 совершает сложное движение, состоящее из трех движений - прямолинейного по направляющей 2, поворотного вокруг шарнира 8 и прямолинейного по направляющей 7 звена 6. Совокупность этих трех движений и образует перемещение каждой точки ведомого звена 9 и установленного на нем стола 29 по криволинейной траектории, эквидистантной контуру изгиба упругой направляющей 10.
Формула изобретения
1. Направляющий механизм, содержащий основание с прямолинейной направляющей, установленную на них каретку, связанную с основанием посредством ходового винта и гайки, установленное на каретке промежуточное звено с прямолинейной направляющей, установленное с возможностью перемещения на этих направляющих ведомое звено, криволинейную направляющую, кинематичес0
7 96
ки связанную с основанием и ведомым звеном, и устройство регулировки попожения криволинейнрй направляющей относительно основания, отличающийся тем, что, с целью повышения быстродействия, промежуточное звено установлено с возможностью поворота, криволинейная направляющая выполнена в виде упругой пластины, ее кинематическая связь с ведомым звеном выполнена в виде установленных на последнем двух пар роликов, устройство регулировки положения криволинейной направляющей выполнено в виде винта, установленного на основании перпендикулярно ходовому винтуf взаимодействующей с ним гайки, цапфы, установленной на гайке и связанной с криволинейной направляющейs двух установленных на основании симметрично относительно оси винта двуплечих коромысел, одни плечи которых с помощью общего шарнира связаны с гайкой устройства регулирования положения криволинейной направляющей, а во вторых плечах выполнены сквозные криволинейные пазы, в основании симметрично оси винта и параллельно ему выполнены прямолинейные сквозные направляющие пазы, перекрещивающиеся со сквозными криволинейными лазами, а механизм снабжен поворотными цапфами, кинематически связанными с криво5
0
5
0
линейной направляющей, одни из которых установлены на основании, а другие - в местах перекрещивания соот- . ветствующих сквозных пазов основания и коромысел.
2.Механизм по п. 1, о т л и - чающийся тем, что, с целью повышения надежности при любом расположении пазов, угол перекрещивания направляющих пазов основания и коромысел не менее 45°.
3.Механизм по пп. 1 и 2, о т - личающийся тем, что в ведомом звене выполнена направляющая, параллельная направляющей промежуточного звена, а механизм снабжен установленным на этой направляющей столом и приводом его перемещения.
t
nj
li

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения по дуге при стереофотосъемке | 1988 |
|
SU1597851A1 |
| Непрерывно-протяжной станок | 1982 |
|
SU1115869A1 |
| Устройство для обработки контактных линз | 1974 |
|
SU618196A1 |
| Устройство фиксации привода вагонной двери | 2024 |
|
RU2840952C1 |
| Винтовой механизм | 1986 |
|
SU1337587A1 |
| Устройство для перемещения по дуге при стереофотосъемке | 1985 |
|
SU1278791A1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| ЛЕСОПИЛЬНАЯ РАМА | 1992 |
|
RU2038949C1 |
| Установка для физико-механических испытаний образцов материалов | 1988 |
|
SU1536253A1 |
| Устройство для сварки криволинейных швов по копиру | 1981 |
|
SU1047642A1 |
Изобретение относится к направляющим механизмам для перемещения объекта по различным криволинейным траекториям и может быть использовано в машиностроении. Цель изобретения - повышение быстродействия. Положительный эффект обеспечивается выполнением направляющей в виде упругой пластины и применением устройства, быстро изменяющего ее кривизну. При вращении винта перемещается центральная цапфа и одновременно поворачиваются двуплечие коромысла. Их пазы перемещают по направляющим пазам основания промежуточные цапфы. Крайние поворотные цапфы остаются на месте. Далее изгибают упругую направляющую по форме, например, дуги окружности. После изгиба упругой направляющей до требуемой кривизны вращением ходового винта перемещают каретку. При этом ролики, обкатываясь по упругой направляющей, разворачивают звенья относительно каретки. Одновременно звено перемещается по направляющим и в итоге совершает движение по криволинейной траектории, определяемой формой кривизны упругой направляющей. 2 з.п. ф-лы, 5 ил.
5-Б
Фие4
//
Фиг.З
в-в
26
Фие5
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Г | |||
| II, 1971 г | |||
| Пропеллер-радиатор | 1924 |
|
SU951A1 |
