Изобретение относится к устройствам фильтрации с переменными в зависимости от входного сигнала параметрами и может найти широкое применение в высокочастотных следящих системах, работающих в условиях помех высокого уровня.
Цель изобретения - повышение точности устройства., .
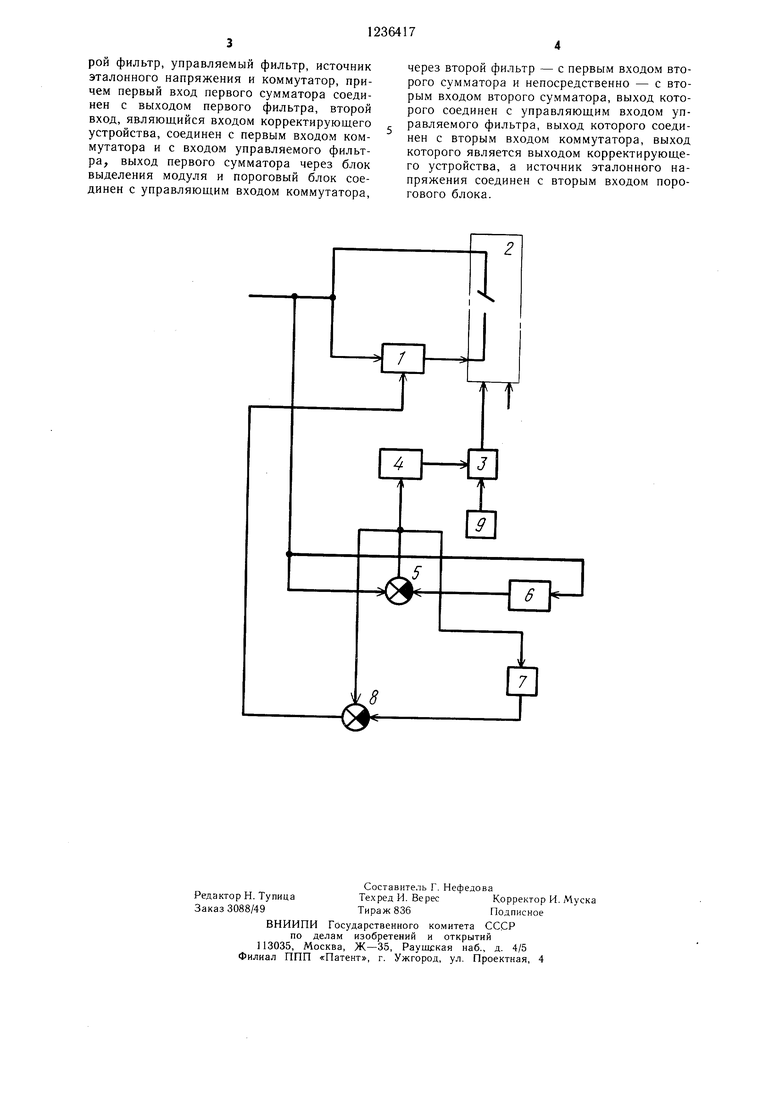
На .чертеже представлена структурная схема корректируюш,его устройства.
нал), то сигнал Л , прошедший через блок 4, не вызовет срабатывания блока 3. Блок 4 выделяет из любого сигнала модуль этого сигнала. В случае повышения уровня помехи срабатывает блок 3 и подключает выход коммутатора 2 к его второму входу. Входной сигнал UBX. проходит через фильтр 1, который начинает фильтровать помеху входного сигнала. Эффективность третьего фильтра 1 является функцией выходного
Приняты следуюш.ие обозначения: уп- ю сигнала второго сумматора 8, например, по
равЛаемый фильтр 1, коммутатор 2, поро- блок 3, блок.4 модуля, первый сумматор 5, первый и второй фильтры 6 и 7, второй сумматор 8, источник 9 эталонного напряжения.
Корректирующее устройство работает следующим образом.
На выходе источника 9 напряжения устанавливается напряжение, при превышении которого срабатывает блок 3. Выставленное при настройке пороговое значение о срабатывания блока 3 выбрано из условия определяемого заранее соотношения между полезным сигналом и шумом. Коммутатор 2 в исходном состоянии (при установке начальных условий) выходом подключен к своему первому сигнальному входу. Коммутатором 2 может служить обычное реле с нормально замкнутым контактом. При подаче на вход самонастраивающегося фильтра сигнала ошибки следящей системы, представляющего собой аддитивэтому сигналу изменяется сопротивление R-RC-фильтра, если в качестве фильтра 1 применен RC-фильтр.
Сигналы на входы сумматора 8 поступают с выхода сумматора 5 и выхода фильтра 6, например, с передаточной функцией.
i
w- (P)
(3)
где Т - постоянная времени фильтра 7 На выходе сумматора 8 формируется следующий сигнал:
л 1г Тбр уг ,-. ивх.(р)Твр
А (Р) (Тф4-1)(Т,р+1)
25 ТбТтр
(Тбр+ 1)(Т7р.+ 1)
(4)
т.е. сигнал, пропорциональный второй производной сигнала ошибки следящей системы. Сигнал &. несет информацию о частотных свойствах шумового сигнала помехи.
ную смесь полезного сигнала и помехи, этот 0 Сигналом Д изменяют частоту среза фильтсигнал проходит с входа самонастраивающегося фильтра на его выход без преобразования. При этом происходит сравнение входного сигнала и сигнала, прошедшего через первый фильтр 6, например, с передаточной функцией
W6(p)
1
Тер
постоянная времени первого фильтра 6.
выходе сумматора 5 формируется ий сигнал:
UBX.(P)
p)
.Тбр
Тбр+ 1
Uw (р),
(2)
где UBX. (р) - отображение входного сигнала
самонастраивающегося фильт- 50 / ра.
Сигнал Л (р) пропорционален первой производной сигнала .ошибки следящей системы.
Сигнал Д несет информацию о величине
40 ходит через фильтр 1, постоянная времени которого является функцией второй производной Д сигнала ошибки следящей системы. Поэтому каждый раз, осуществляя подавление помехи, самонастраивающийся фильтр вносит минимально возможные фазовые запаздывания в следящую систему. Тем самым за счет адаптивной перестройки самонастраивающегося фильтра удается повысить точность следящей системы, в которой он установлен.
Формула изобретения
Корректирующее устройство, содержащее первый фильтр, вход которого явля(по амплитуде) сигнала помехи (более вы-55 ется входом устройства, а также два суммасокочастотного, чем полезный сигнал). Еслитора, пороговый блок и блок выделения мополученный сигнал мал, в случае низкогодуля, отличающееся тем, что, с целью поуровня помехи (плавно изменяющийся сиг-вышения его точности, в него введены втонал), то сигнал Л , прошедший через блок 4, не вызовет срабатывания блока 3. Блок 4 выделяет из любого сигнала модуль этого сигнала. В случае повышения уровня помехи срабатывает блок 3 и подключает выход коммутатора 2 к его второму входу. Входной сигнал UBX. проходит через фильтр 1, который начинает фильтровать помеху входного сигнала. Эффективность третьего фильтра 1 является функцией выходного
сигнала второго сумматора 8, например, по
этому сигналу изменяется сопротивление R-RC-фильтра, если в качестве фильтра 1 применен RC-фильтр.
Сигналы на входы сумматора 8 поступают с выхода сумматора 5 и выхода фильтра 6, например, с передаточной функцией.
i
w- (P)
(3)
где Т - постоянная времени фильтра 7 На выходе сумматора 8 формируется следующий сигнал:
л 1г Тбр уг ,-. ивх.(р)Твр
А (Р) (Тф4-1)(Т,р+1)
25 ТбТтр
(Тбр+ 1)(Т7р.+ 1)
(4)
т.е. сигнал, пропорциональный второй производной сигнала ошибки следящей системы. Сигнал &. несет информацию о частотных свойствах шумового сигнала помехи.
Сигналом Д изменяют частоту среза фильтра
Положительный эффект предлагаемого самонастраивающегося фильтра заключается в том, что с введением новых функциональных связей входной сигнал с помехой малого уровня проходит без преобразования, что не ухудшает фазовой характеристики следящей системы, а входной сигнал с помехой относительно большего уровня проходит через фильтр 1, постоянная времени которого является функцией второй производной Д сигнала ошибки следящей системы. Поэтому каждый раз, осуществляя подавление помехи, самонастраивающийся фильтр вносит минимально возможные фазовые запаздывания в следящую систему. Тем самым за счет адаптивной перестройки самонастраивающегося фильтра удается повысить точность следящей системы, в которой он установлен.
Формула изобретения
Корректирующее устройство, содержащее первый фильтр, вход которого является входом устройства, а также два суммарой фильтр, управляемый фильтр, источник эталонного напряжения и коммутатор, причем первый вход первого сумматора соединен с выходом первого фильтра, второй вход, являющийся входом корректирующего устройства, соединен с первым входом коммутатора и с входом управляемого фильтра, выход первого сумматора через блок выделения модуля и пороговый блок соединен с управляющим входом коммутатора.
через второй фильтр с первым входом второго сумматора и непосредственно - с вторым входом второго сумматора, выход которого соединен с управляющим входом управляемого фильтра, выход которого соединен с вторым входом коммутатора, выход которого является выходом корректирующего устройства, а источник эталонного напряжения соединен с вторым входом порогового блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с переменным моментом инерции | 1983 |
|
SU1141375A1 |
| Система управления с перемен-НОй СТРуКТуРОй | 1978 |
|
SU840797A1 |
| Устройство для определения коэффициента усиления объекта | 1984 |
|
SU1228080A1 |
| Нелинейное корректирующее устройство | 1980 |
|
SU951231A1 |
| Способ формирования сигнала управления | 1979 |
|
SU857931A1 |
| Следящая система | 1977 |
|
SU642676A1 |
| Устройство для подавления помех | 1983 |
|
SU1095419A1 |
| Самонастраивающаяся по входному сигналу система управления | 1987 |
|
SU1529176A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU744446A1 |
| Следящая система | 1980 |
|
SU1003016A2 |
Изобретение относится к устройствам фильтрации с переменными в зависимости от входного сигнала параметрами и может найти широкое применение в высокочастотных следящих системах, работающих в условиях помех высокого уровня. Целью изобретения является повышение точности устройства. Цель достигается тем, что входной сигнал в устройстве поступает на первый вход коммутатора и через управляемый фильтр на второй вход коммутатора, который переключается в зависимости от величины производной входного сигнала. Постоянная времени управляемого фильтра изменяется пропорционально второй производной входного сигнала. ю со О5 4
| ДИЙСЯ АКТИВНЫЙ RC-фильтр | 0 |
|
SU273319A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Многошпиндельный станок для сверления радиальных отверстий | 1933 |
|
SU36130A1 |
| Способ переработки сплавов меди и цинка (латуни) | 1922 |
|
SU328A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU628457A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
