Изобретение относится к .подъемно- транспортному машиностроению, конкретнее к грузоподъемникам с большой свободной высотой подъема, им€ .ющим улучшенную обзорность, достигаемую высвобождением внутреннего пространства, и может быть использовано в конструкциях электро- и автопогрузчиков, перерабатывакщих грузы внутри железнодорожных вагонов иконтейнеров,
Цель изобретения - повьшение надежности, упрощение управления и улучшение обзорности.
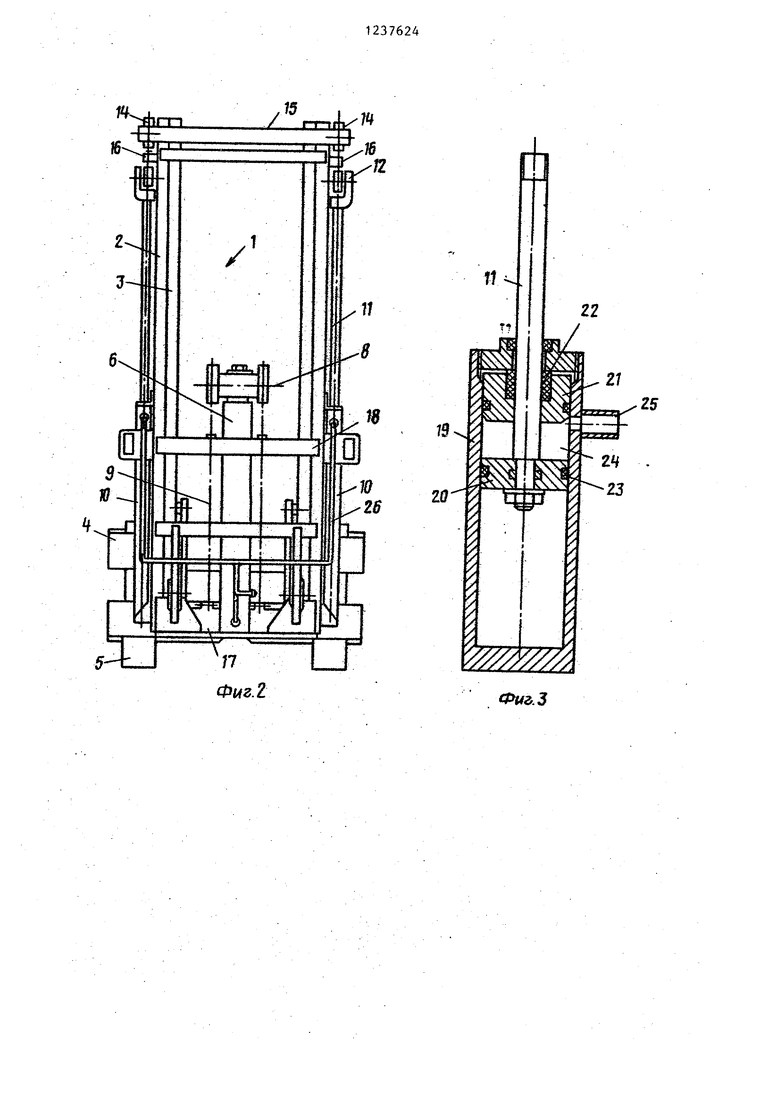
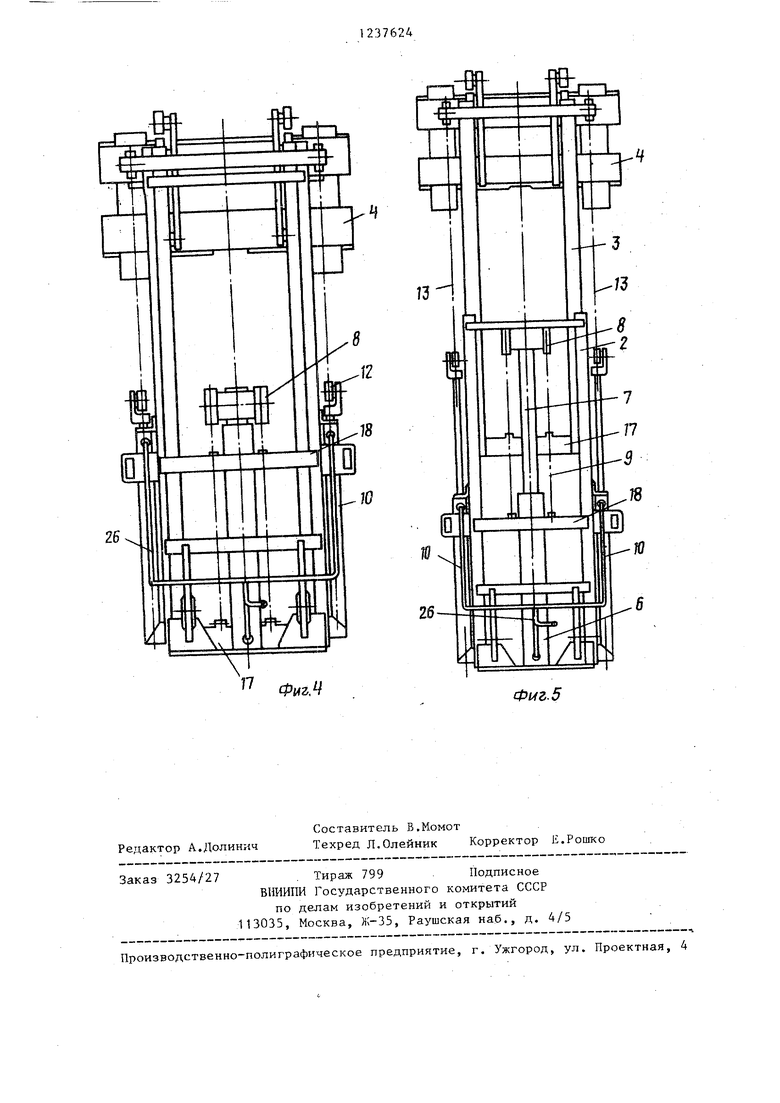
На фиг. 1 изображен общий вид вилочного погрузчика с грузоподъемником, вид сбокуJ на фиг. 2 - вид с места водителя на грузоподъемник при нижнем положении каретки; на фиг.З - один из дополнительных цилиндров| на фиг. 4 вид с места водителя на грузоподъемник при верхнем положении каретки, на фиг. 5 - вид с места води- таля на грузоподъемник при поднятой знутренней раме и верхнем положении каретки.
Грузоподъемник 1 вилочного погрузчика содержит наружную неподвижную раму 2, перемещающуюся по ней внутреннюю подвижную раму 3, каретку 4, снабженную вилами 5 и перемещающуюся по подвижной раме 3, укрепленный на нижней части неподвижной рамы центрально расположенньй укороченный силовой цилиндр 6 одностороннего действия со штоком 7, несущим блоки 8, контактирующие с гибкими элементами 9, соединяющими подвижную раму 3 и неподвижную раму 2. Для обеспечения привода подъема каретки 4 по боковым сторонам неподвижной раму 2 установлены два поршневых цилиндра 10 одностороннего действия со штоками 11, несущими блоки 12, контактирующие с другими гибкими элементами 13, взаи- модействуницими с блоками 14, установленными на верхней связи 15 подвижно рамы 3. Эти гибкие элементы 13, выполненные в виде пластинчатых цепей, закреплены одними своими концами к грузовой каретке 4, а другими - к кронштейнам 16, установленным с наружной стороны рамы 2. Гибкие элементы 9, выполненные в виде пластинчатых цепей, закреплены одними своими концами на нижней связи 17 подвижной раша 3, другими - на связи 18 неподвижной рамы 2 о
0
3
Цилиндр 6 может быть как порщне- вого, так и плунжерного типа. Поршневые цилиндры 10 одностороннего действия содержат гильзу 19, поршень 20 со штоком 11, корпус 21 уплотнений, уплотнения 22 и 23. Штоковая полость 24 - рабочая, рабочая жидкость подается в нее через отверстие 25.
Рабочая площадь штоковой полости 24 цилиндра 10 в 4 раза меньше площади поршня (или плунжера, если цилиндр плунжерньй) цилиндра 6. Рабочая жидкость к цилиндру 6 и к цилиндрам 10 подводится по жесткому трубопрово- S ду 26.
Устройство работает следующим образом.
Из исходного положения, показанного на фиг. 2, при одновременном нагнетании рабочей жидкости в рабочую (бесштоковую) полость цилиндра 6 и в рабочие (штоковые) полости цилиндров 10 первыминачнут движение поршня 20 и штоки 11 цилиндров 10 (опре- дeляeтcя соотношением рабочих площадей и нагрузок. Штоки 11 цилиндров 10, несущие блоки 12, с помощью гибких элементов 13 осуществляют подъем каретки 4 в крайнее верхнее положение относительно подвижной рамы 3 (см. фиг. 4), при этом штоки 11 втягиваются в цилиндры 10. При дальнейшем нагнетании рабочей жидкости в ; рабочую (бесютоковую) полость цилиндра 6 и в рабочие (штоковые) полости цилиндров 10 движение получит шток (плунжер) 7 цилиндра 6 с установленными на нам блоками 8, осуществляющими с помощью гибких элементов 9 подъем подвижной рамы 3 вместе с установленными на ней блоками 14, кон- тактирукмцими с гибкими элементами 13, вьдвигающими штоки 11 цилиндров 10. Рабочая жидкость, из штоковых полостей цилиндров 10 перетекает в бесштоковую полость цилиндра 6, обеспечивая постоянную скорость подъема харетки 4 относительно неподвижной рамы 2. Подъем каретки 4 и подвижной рамы 3 будет происходить до тех пор, пока цилиндры 6 и цилиндры 10 не исчерпают своего хода (см. фиг. 5). Опускание подвижной рамы 3 и каретки 4 происходит при отключении подачи рабочей жидкости под действием веса груза в обратной последовательности.
0
0
5
0
55
.«С
1В
Ф|/аЗ
ФигМ
Фиг. 5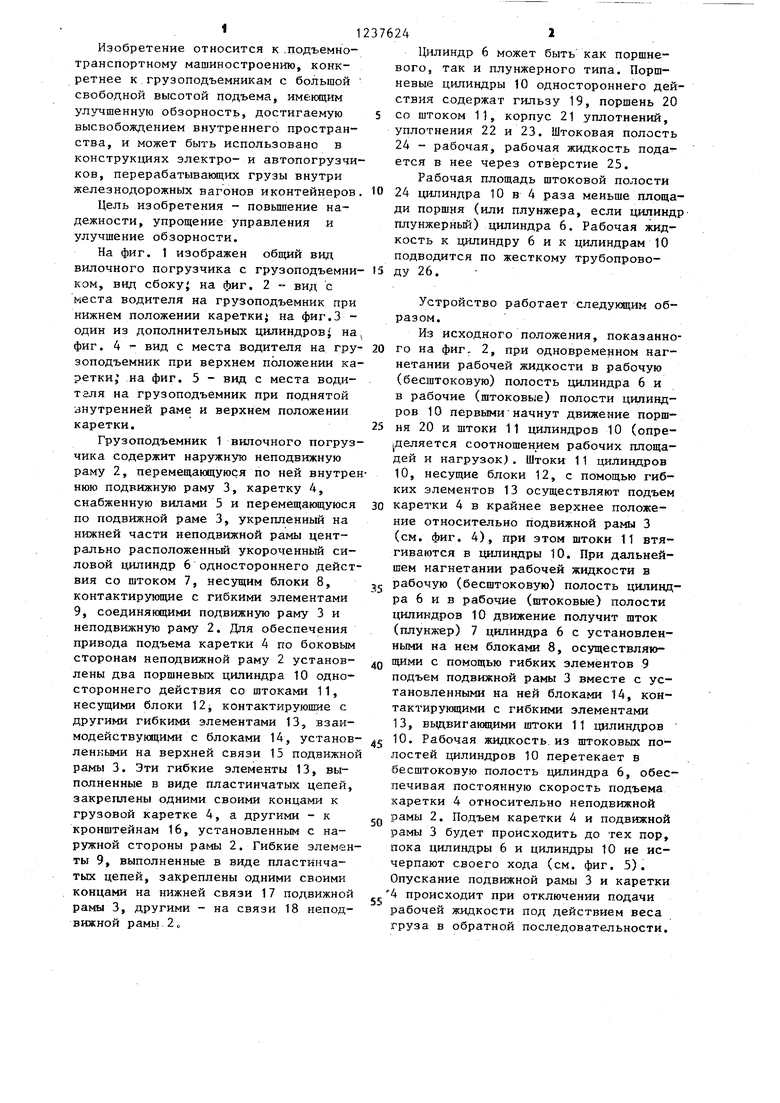
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления рабочим органом | 1989 |
|
SU1654609A1 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| Гидравлическая система навесного погрузчика | 1989 |
|
SU1723016A1 |
| Поворотное устройство вилочного захвата погрузчика | 1982 |
|
SU1041507A1 |
| Вилочный электропогрузчик | 1972 |
|
SU459883A3 |
| ГРУЗОЗАХВАТ-СТАЛКИВАТЕЛЬ К ПОГРУЗЧИКУ | 1996 |
|
RU2116958C1 |
| ГРУЗОПОДЪЕМНИК ПРОМЫШЛЕННОГО ПОГРУЗЧИКА | 1991 |
|
RU2048431C1 |
| Захват для сыпучих грузов к погрузчику | 1988 |
|
SU1596655A1 |
| Вилочный захват погрузчика | 1990 |
|
SU1770261A1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2005 |
|
RU2297383C2 |
Редактор А.Долинич
Составитель В.Момот
Техред Л.Олейник Корректор Е.Рошко
3254/27
. Тираж 799Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Кислотостойкий жаропрочный и пластичный припой | 1960 |
|
SU671964A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
