Предложение относится к погрузочно-транспортной технике и может быть использовано в авто- и электропогрузчиках.
Известен грузоподъемник, содержащий неподвижную и подвижную секции, грузовую каретку, по крайней мере один гидроцилиндр подъема, цепь и шкив, причем подвижная секция соединена с неподвижной секцией с возможностью своего перемещения вверх, грузовая каретка соединена с подвижной секций с возможностью своего перемещения вверх, на штоке гидроцилиндра размещен шкив, через который сверху переброшена цепь, концы которой прикреплены к неподвижной секции и грузовой каретке [Вайнсон А.А. Подъемно-транспортные машины, М.: Машиностроение, 1989, стр.495, абзац 5]. Недостатком этого грузоподъемника является отсутствие специального свободного хода возможности без увеличения габаритной высоты грузоподъемника перемещать вверх грузовую каретку с грузозахватным приспособлением на высоту, соизмеримую с высотой обрабатываемого груза, что ограничивает возможности обработки грузов этим грузоподъемником в помещениях с низкими потолками (вагонах, фурах, контейнерах), поскольку этот грузоподъемник не способен обработать груз, размещенный на втором и последующих ярусах.
Известен грузоподъемник, содержащий неподвижную и подвижную секции, грузовую каретку, по крайне мере один гидроцилиндр подъема, две цепи и два шкива, причем подвижная секция соединена с неподвижной секцией с возможностью своего перемещения вверх, грузовая каретка соединена с подвижной секцией с возможностью своего перемещения вверх, к штоку гидроцилиндра прикреплен первый шкив, через который сверху переброшена первая цепь, концы которой прикреплены к подвижной и неподвижной секциям, на подвижной секции прикреплен второй шкив, через который сверху переброшена вторая цепь, концы которой прикреплены к неподвижной секции и грузовой каретке [Патент ФРГ №3139758, МПК В 66 F 9/08, 1981]. Недостатком этого грузоподъемника также является отсутствие специального свободного хода.
Известен грузоподъемник, содержащий неподвижную и подвижную секции, грузовую каретку, гидроцилиндр подъема, гидроцилиндр свободного хода, цепь и два шкива, причем подвижная секция соединена с неподвижной секцией с возможностью своего перемещения вверх, грузовая каретка соединена с подвижной секцией с возможностью своего перемещения вверх, к подвижной секции прикреплен гидроцилиндр свободного хода, к штоку которого прикреплен первый шкив, через который переброшена цепь, концы которой прикреплены к подвижной секции, и через прикрепленный к подвижной секции второй шкив - к грузовой каретке [Пат. Франции №2460883, МПК В 66 F 9/08, 1980]. Недостатком этого грузоподъемника является наличие дополнительного узла - гидроцилиндра свободного хода с элементами подачи к нему на подвижную секцию жидкости высокого давления, что делает этот грузоподъемник сложным и ненадежным.
Известен грузоподъемник погрузчика, содержащий неподвижную и подвижную секции, грузовую каретку, гибкий тяговый элемент (например, цепь), ограничитель перемещения гибкого тягового элемента, гидроцилиндр подъема и три шкива, причем подвижная секция соединена с неподвижной секцией с возможностью своего перемещения вверх, грузовая каретка соединена с подвижной секцией с возможностью своего перемещения вверх, гидроцилиндр подъема и ограничитель перемещения гибкого тягового элемента прикреплены к неподвижной секции, первый шкив прикреплен к штоку гидроцилиндра подъема, второй шкив прикреплен к подвижной секции, третий шкив прикреплен к неподвижной секции, концы гибкого тягового элемента прикреплены к подвижной секции и к грузовой каретке, гибкий тяговый элемент огибает сверху второй, снизу третий и сверху первый шкивы (FR 2057287 А1, 21.05.1971).
Недостаток этого грузоподъемника заключается в том, что при подъеме каретки на высоту, превышающую ее ход относительно подвижной секции, каретка не находится в крайнем верхнем положении относительно подвижной секции, что приводит к потере высоты подъема груза в помещениях.
Технический эффект предложения заключается в том, в нем реализован режим подъема груза "под потолок", т.е. такой режим, при котором обеспечивается подъем каретки на любую (не выше максимальной) высоту, превышающую ее ход относительно подвижной секции, при одновременном достижении кареткой крайнего верхнего положения относительно подвижной секции, и, как следствие, предотвращение потери высоты подъема груза в помещениях.
Данный технический результат достигается тем, что в грузоподъемнике погрузчика, содержащем неподвижную и подвижную секции, грузовую каретку, гибкий тяговый элемент, выполненный, например, в виде цепи, ограничитель перемещения гибкого тягового элемента, гидроцилиндр подъема, причем подвижная секция соединена с неподвижной секцией с возможностью своего перемещения вверх, грузовая каретка соединена с подвижной секцией с возможностью своего перемещения вверх, к поршню гидроцилиндра подъема прикреплен первый шкив, к подвижной секции прикреплен второй шкив, к неподвижной секции прикреплены третий шкив или звездочка, концы гибкого тягового элемента прикреплены к подвижной секции и к грузовой каретке, гибкий тяговый элемент огибает сверху второй шкив, снизу третий шкив или звездочку и сверху первый шкив, при этом гидроцилиндр подъема и ограничитель гибкого тягового элемента прикреплены к неподвижной секции, ограничитель перемещения гибкого тягового элемента выполнен с возможностью блокирования последнего в любых или некоторых фиксированных положениях.
При этом ограничитель перемещения гибкого тягового элемента может иметь фиксатор с приводом, выполненный с возможностью перемещения фиксатора относительно упомянутой звездочки, взаимодействующей с цепью и выполненной с выступами для взаимодействия с фиксатором.
На графических материалах изображено:
фиг.1 - грузоподъемник в исходном положении;
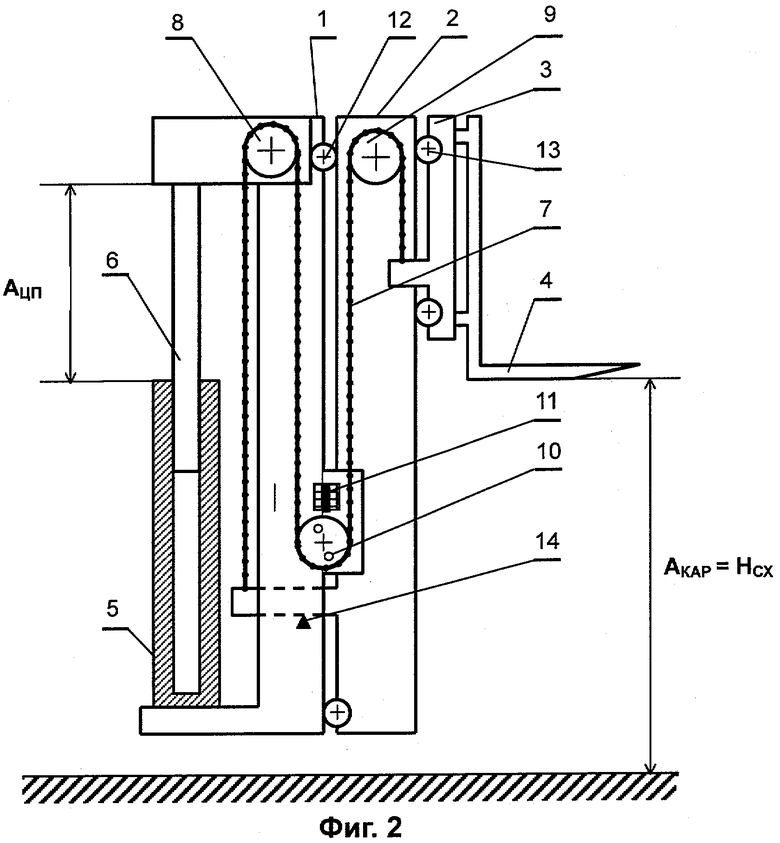
фиг.2 - грузоподъемник в режиме максимального свободного хода;
фиг.3 - грузоподъемник в режиме подъема груза на максимальную высоту;
фиг.4 - грузоподъемник в режиме подъема груза на максимальную высоту при работе в помещении с низким потолком;
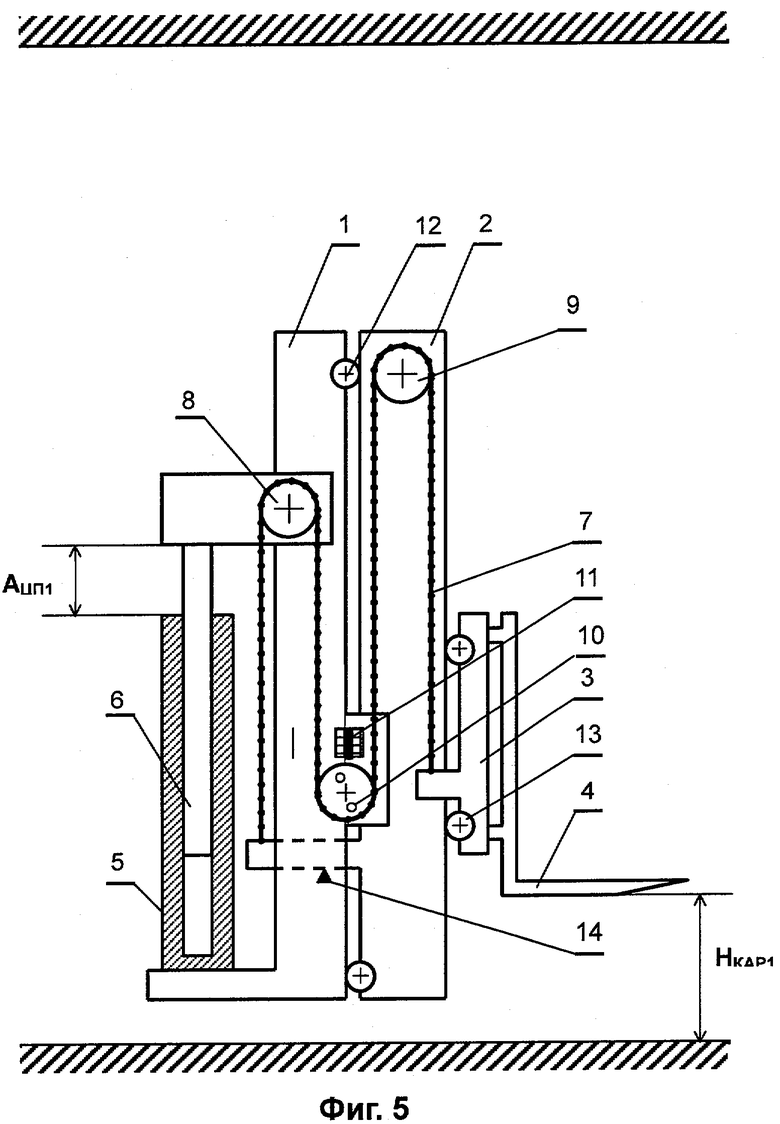
фиг.5 - грузоподъемник в промежуточном положении режима "подъем груза под потолок";
фиг.6 - грузоподъемник в окончательном положении режима "подъем груза под потолок";
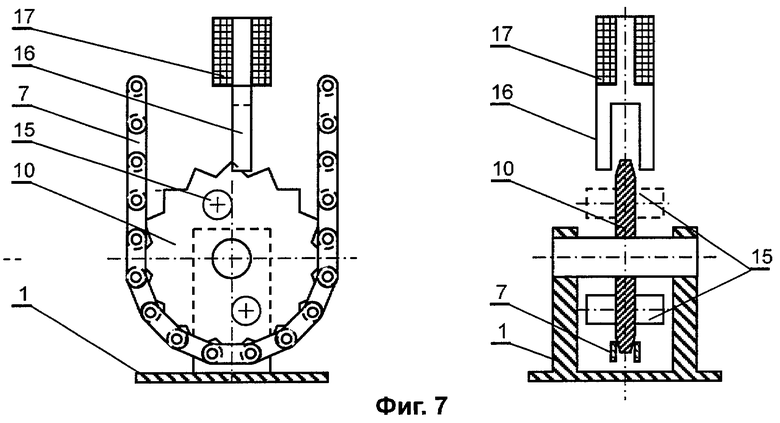
фиг.7 и 8 - вариант выполнения ограничителя перемещения гибкого тягового элемента в выключенном и включенном состояниях.
Грузоподъемник содержит неподвижную 1 и подвижную 2 секции (далее - НС 1 и ПС 2), грузовую каретку 3, к которой прикреплено грузозахватное приспособление 4 (например, вилы), гидроцилиндр подъема 5 (далее - ЦП) с поршнем 6, гибкий тяговый элемент 7 (например, цепь, далее - ГТЭ), шкивы 8, 9 и 10, ограничитель перемещения ГТЭ 11 (далее - ограничитель). ПС 2 перемещается вверх вдоль НС 1 с помощью роликов 12, каретка 3 перемещается вдоль ПС 2 с помощью роликов 13. В крайнем нижнем положении ПС 2 располагается на опоре 14, закрепленной на НС 1. Шкивы 8, 9 и 10 расположены, соответственно, на поршне 6, ПС 2 и НС 1. Один конец ГТЭ 7 прикреплен к каретке 3, а второй - к ПС 2.
Ограничитель 11 может, по выбору оператора (водителя погрузчика), находиться в выключенном или включенном состояниях. В выключенном состоянии ограничитель 11 не препятствует перемещению ГТЭ 7, а во включенном - блокирует возможность перемещения относительно НС 1 (по крайней мере в ту сторону, при котором происходит перемещение каретки 3 вверх) того участка ГТЭ 7, на который он воздействует. Воздействие может осуществляться на любой участок ГТЭ 7, расположенный между шкивами 8 и 9.
Вариант выполнения ограничителя 11 приведен на фиг.7 (в выключенном состоянии) и 8 (во включенном состоянии). В этом варианте ПГЭ 7 выполнен в виде цепи, шкив 10 - в виде звездочки, к которой прикреплены один или несколько выступов 15, с которыми может взаимодействовать фиксатор 16. Привод фиксатора 16 может быть механическим, электрическим и пр. На фиг.7 и 8 для примера изображено втягивающее реле 17 электропривода, выключатель которого расположен на панели управления погрузчиком. В выключенном состоянии ограничителя 11, т.е. при подаче питания на втягивающее реле 17, фиксатор 16 поднимается в верхнее положение, поэтому шкив 10 может свободно вращаться, и, таким образом, для перемещения ГТЭ 7 нет препятствий. Во включенном состоянии ограничителя 11, т.е. при снятии питания с реле 17, фиксатор 16 под действием своего веса или пружины (не показано) опускается в нижнее положение и, взаимодействуя с выступом 15, препятствует вращению шкива 10, по крайней мере в ту сторону, при котором происходит перемещение каретки 3 вверх (на схеме - по часовой стрелке), и, следовательно, перемещению вышеуказанного участка ГТЭ 7 относительно НС 1.
В других вариантах выполнения ограничителя 11 усилие фиксатора или тормозных колодок может воздействовать непосредственно на ГТЭ 7.
НС 1 может быть прикреплена к корпусу погрузчика или входить в состав более сложных (3-, 4-секционных и более) грузоподъемников.
В исходном положении (фиг.1) поршень 6 полностью вдвинут внутрь ЦП 5, ПС 2 занимает крайнее нижнее положение, опираясь на опору 14. Каретка 3 также находится в крайнем нижнем положении будучи подвешенной к натянутому ГТЭ 7.
Грузоподъемник может функционировать в трех режимах.
Режим свободного хода (фиг.2). В этом режиме ограничитель 11 постоянно выключен. После подачи жидкости высокого давления в ЦП 5 его поршень 6 перемещается вверх и воздействует на ГТЭ 7 посредством шкива 8, при этом на ПС 2 действуют по вертикали следующие силы:
- вес РПС ПС 2, приложенный к ее центру тяжести и направленный вниз;
- две силы, приложенные к шкиву 9 и направленные вниз, равные каждая Т, где Т - натяжение ГТЭ 7. Пренебрегая трением в шкивах 8, 9 и 10, будем считать Т одинаковым по всей длине ГТЭ 7;
- сила Т, приложенная к точке крепления ГТЭ 7 к ПС 2 и направленная вверх;
- сила трения FТР.КАР между ПС 2 и кареткой 3, приложенная к точке крепления роликов 13 и направленная вверх;
- сила трения FТР.НС между ПС 2 и НС 1, приложенная к точке крепления роликов 12 и направленная вниз;
- направленная вверх сила FОП реакции опоры 14.
В результате на ПС 2 действует сила

Учитывая, что

получаем

т.е. сила F направлена вниз, по величине не меньше, чем вес ПС 2, и парируется реакцией опоры FОП. В результате ПС 2 остается в исходном положении, располагаясь на опоре 14.
Шкивы 9 и 10 функционируют в качестве неподвижных блоков, а шкив 8 - в качестве подвижного блока, поэтому каретка 3 перемещается вверх на расстояние, в 2 раза большее, чем перемещение шкива 8, равное ходу 6, т.е. 2 АЦП
При выполнении условия

каретка 3 займет крайнее верхнее положение относительно ПС 2 в момент полного выдвижения поршня 6, т.е. при этом условии достигается максимально возможная (равная АКАР) величина свободного хода при заданных геометрических размерах элементов грузоподъемника, или свободный ход является полноразмерным.
При снятии давления в ЦП 5 каретка 3 под действием своего веса (а также грузозахватного приспособления 4 и груза, если он есть) перемещается вниз, и вместе с ним в исходное положение возвращается и поршень 6.
Режим подъема груза на максимальную высоту (фиг.3). В этом режиме ограничитель 11 включают перед подъемом. При этом участок ГТЭ 7, расположенный между шкивами 9 и 10, имеет натяжение, равное (РКАР+РГЗП+РГР), а участок ГТЭ 7, расположенный между шкивами 8 и 10, равное (РПС+РКАР+РГЗП+РГР), т.е. суммарный момент сил, приложенных к шкиву 10, стремится повернуть его в том направлении, в котором ограничитель 11 этому препятствует (на чертеже - по часовой стрелке), и ГТЭ 7 фактически распадается на два независимых участка, причем один из концов каждого из них неподвижен относительно НС 1 так, как если бы эти концы были к ней прикреплены. После подачи давления в ЦП 5 его поршень 6 перемещается вверх и воздействует на ГТЭ 7 посредством шкива 8, который выполняет функцию подвижного блока. Поэтому перемещение поршня 6, а вместе с ним и шкива 8 вверх на величину АЦП приводит к перемещению ПС 2 вверх на величину, вдвое большую, т.е. 2 АЦП. Вместе с ПС 2 на ту же величину перемещается вверх и прикрепленный к ней шкив 9, выполняющий теперь функцию подвижного блока. Каретка 3 при этом перемещается вверх на величину, вдвое большую, чем перемещение шкива 9 или ПС 2, т.е.

При выполнении условия [4] каретка 3 займет крайнее верхнее положение относительно ПС 2 в момент полного выдвижения поршня 6, и при этом сама ПС 2 также поднимется вверх на величину 2 АЦП, при которой еще обеспечивается жесткость и прочность грузоподъемника.
При снятии в ЦП 5 давления ПС 2 под действием своего веса перемещается вниз до упора 14, каретка 3 под действием своего веса (а также грузозахватного приспособления 4 и груза, если он есть) перемещается вниз, и вместе с ними в исходное положение возвращается и поршень 6. После полного опускания ПС 2 и соприкосновения ее с опорой 14 ограничитель 11 может быть выключен.
Режим подъема груза "под потолок". Пусть грузоподъемник работает в помещении, причем расстояние от верхней точки ПС 2 грузоподъемника до потолка равно АПОТ, где

В этом случае в режиме свободного хода груз может быть поднят на высоту не более, чем HСХ, равному АКАР. В режиме подъема груза на максимальную высоту (фиг.4) ПС 2 может переместиться вверх на расстояние, не более, чем на величину АПОТ, т.к. в этот момент верхняя часть ПС 2 соприкоснется с потолком. При этом шток 6 будет выдвинут на вдвое меньшую величину, равную АПОТ/2. В результате, согласно [5], высота, на которую в режиме подъема на максимальную высоту можно поднять груз в помещении, составляет 2 АПОТ.
Как видно на фиг.4, в этот момент каретка 3 не находится в максимально верхнем положении относительно ПС 2 (этого положения в режиме подъема груза на максимальную высоту она достигает только в момент максимального выдвижения ПС 2), что приводит к потере высоты подъема груза в этих условиях.
Подъем груза "под потолок" осуществляется в два этапа. Сначала (фиг.5) каретку 3 с грузом поднимают в режиме свободного хода (ограничитель 11 выключен) на высоту HКАР1, равную

Поршень 6 за первый этап переместится вверх на величину

Поскольку на первом этапе подъем выполняется в режиме свободного хода, ПС 2 остается на месте. Затем, на втором этапе, ограничитель 11 включают и дальнейший подъем (фиг.6) осуществляется в режиме подъема груза на максимальную высоту. Поршень 6 на втором этапе перемещается вверх на величину

при этом ПС 2 перемещается вверх на вдвое большую величину, т.е. АПОТ, а каретка 3 - на величину, в 4 раза большую, т.е.

Таким образом, за два этапа ПС 2 переместится вверх на величину, равную АПОТ, т.е. достигнет потолка, а каретка 3 переместится вверх относительно пола на величину

а относительно ПС 2 - на величину 2 АЦП, и при выполнении условия [4] займет относительно нее максимально верхнее положение. Таким образом, потери высоты подъема груза не происходит. Указанное справедливо в том случае, если конструкция ограничителя 11 позволяет блокировать перемещение ГТЭ 7 в любом его положении. Если конструкция ограничителя 11 позволяет блокировать перемещение ГТЭ 7 лишь в некоторых фиксированных положениях (напр. N раз за каждый оборот шкива 10, где N - количество выступов 15), то потеря высоты подъема груза в этом режиме может, в худшем случае, составить ттD/2N, где D - диаметр шкива 10. Увеличивая N, можно уменьшить потери до приемлимой величины.
Опускание груза также происходит в 2 этапа. При снятии давления в ЦП 5 ПС 2 под действием своего веса перемещается вниз до упора 14, каретка 3 под действием своего веса (а также грузозахватного приспособления 4 и груза, если он есть) перемещается вниз, и вместе с ними перемещается вниз и поршень 6. После полного опускания ПС 2 и соприкосновения ее с опорой 14 (каретка 3 в этот момент будет находиться на высоте HКАР1) нагрузка на часть ГТЭ 7, связанной с ПС 2, будет снята и ограничитель 11 может быть выключен. Каретка 3 опускается далее, обуславливая через ГТЭ 7 дальнейшее опускание поршня 6, чему ограничитель 11 не препятствует, поскольку его выключают в момент соприкосновения ПС 2 с опорой 14.
Грузоподъемность грузоподъемника в режиме подъема груза на максимальную высоту равна

где
m - количество цилиндров подъема,
РЦП - рабочее давление жидкости в ЦП 5,
SЦП - рабочая площадь сечения поршня 6.
Коэффициент 1/4 присутствует потому, что в этом режиме при перемещении на величину h каретка 3 с грузом перемещается на величину 4h. В режиме свободного хода при том же перемещении штока 6 каретка 3 с грузом перемещается на вдвое меньшую величину, равную 2h, т.е. при отсутствии других ограничений грузоподъемность грузоподъемника в режиме свободного хода в 2 раза больше, чем в режиме подъема груза на максимальную высоту, что соответствует обычной практике хранения более тяжелых грузов на нижних ярусах, а более легких - на верхних ярусах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА (ВАРИАНТЫ) | 2011 |
|
RU2474530C2 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2010 |
|
RU2437827C1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2010 |
|
RU2442744C1 |
| ГРУЗОПОДЪЕМНИК ПОГРУЗЧИКА | 2009 |
|
RU2392219C1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2008 |
|
RU2363639C1 |
| Устройство для управления приводом вертикального перемещения кареток грузоподъемной машины | 1981 |
|
SU1009927A1 |
| Гидроподъемник | 1988 |
|
SU1574528A1 |
| Судовое устройство для спуска и подьема груза | 1972 |
|
SU492424A1 |
| Грузоподъемник погрузчика | 1977 |
|
SU701927A1 |
| Грузоподъемник | 1977 |
|
SU627073A1 |




Использование: предложение относится к погрузочно-транспортной технике и может быть использовано в авто- и электропогрузчиках. Грузоподъемник содержит неподвижную и подвижную секции (НС и ПС), грузовую каретку с грузозахватным приспособлением, гибкий тяговый элемент (например, цепь), гидроцилиндр подъема, ограничитель перемещения цепи. ПС соединена с НС с возможностью своего перемещения вверх, каретка соединена с ПС с возможностью своего перемещения вверх, первый, второй и третий шкивы размещены на поршне гидроцилиндра, ПС и НС соответственно, один конец цепи прикреплен к грузовой каретке и далее последовательно огибает сверху второй, снизу третий и сверху первый шкивы, второй конец цепи прикреплен к ПС. Вместо третьего шкива может быть использована звездочка. Ограничитель перемещения гибкого тягового элемента выполнен с возможностью блокирования последнего в любых или некоторых фиксированных положениях. Изобретение обеспечивает исключение потери высоты подъема каретки в помещениях. 1 з.п. ф-лы, 8 ил.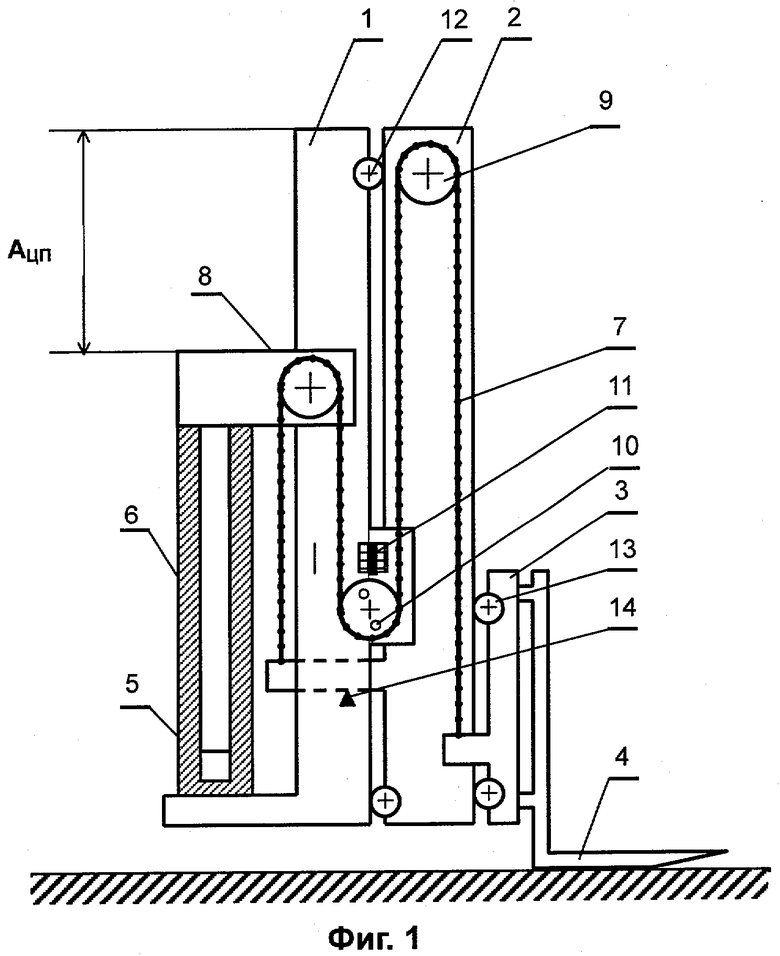
| ПРЕОБРАЗОВАТЕЛЬ КРУГОВЫХ ПЕРЕМЕЩЕНИЙ | 1990 |
|
RU2057287C1 |
| DE 2926657 А1, 15.01.1981 | |||
| Грузоподъемник погрузчика | 1987 |
|
SU1631038A1 |

