Изобретение относится к машиностроению,, может быть использовано для преобразования вращательного движения в сложное, состоящее из вращательного и возвратно-поступательного дзижения и является дополнительным к авт. св. № 1033796.
Цель изобретения - расширение кинематических возможностей механизма за счет получения по необходимости как сложного, так и только возвратно поступательного движения ведомого звена.
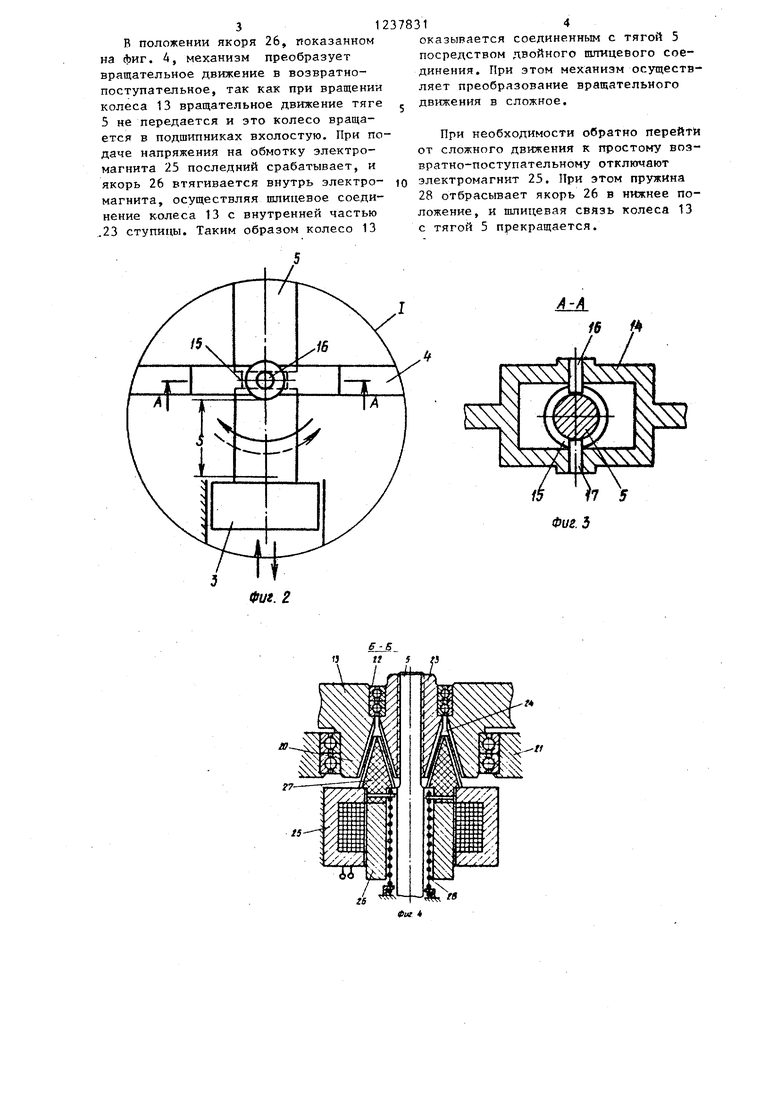
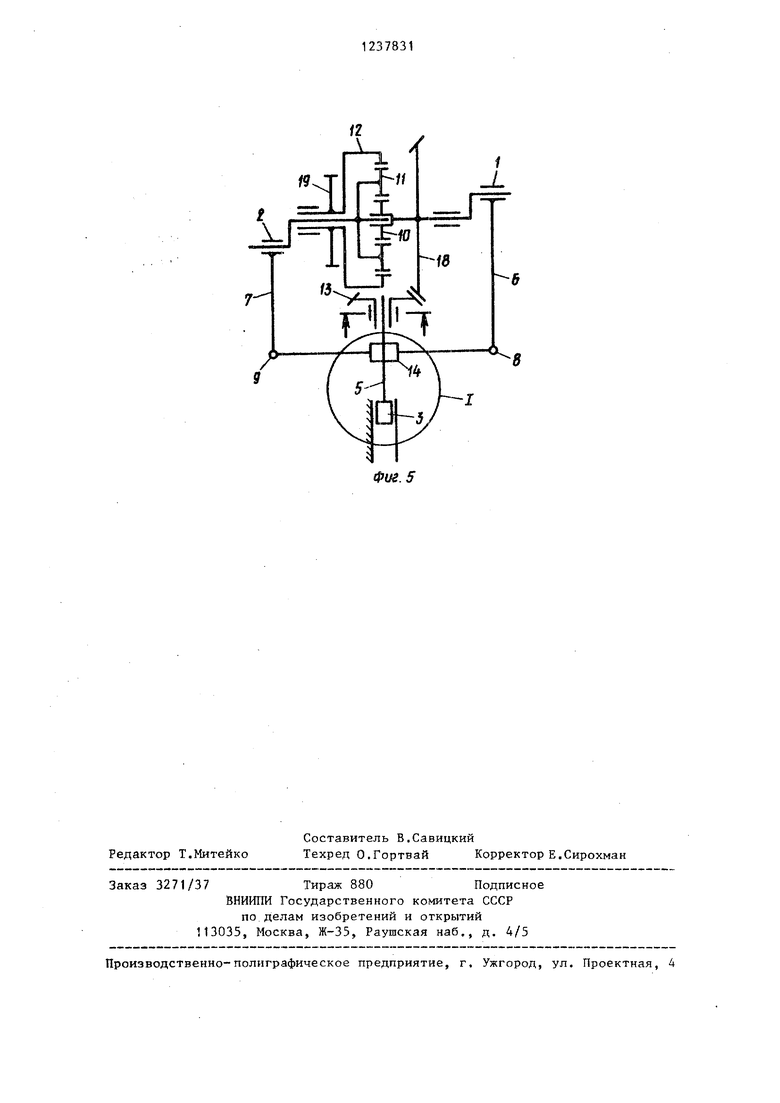
На фиг, 1 показана структурная Схема предлагаемого механизма; на фиг о 2 - узел 1 на фиг. .1 и 5J на фиг.З - разрез А-А на фиг, 2; на фиг. 4 - разрез Б-Б на фиг 1; на фиг.З - вариант вьшолнения механизма применительно к дифференциалу с цилиндрическими колесами.
Шарнирно-кривошипный механизм содержит (фигс, 1 и 2) два соосно установленных кривошипа 1 и 2. Ползун 3 связан с суммирующим рычагом 4 с помощью тяги 5. Одни концы шатунов 6 и 7 через шарниры 8 и 9 связаны с концами рычага 4, а другие - с кривошипами 1 и 2 Между концами кривошипов 1 и 2 размещен дифференциал,
Солнечная шестерня 10 и сателлиты
11дифференциала связаны с кривошипами 1 и 2, а солнечная шестерня
12- с приводом (не показан) управления ходом ползуна 3, установленным между концами кривошипов 1 и 2э причем привод управления ходом ползуна 3 может быть любым.
Механизм снабжен дополнительным коническим зубчатым колесом 13, жестко связанным с тягой 5, например, посредством шлицевого соединения Дпина ступицы конического колеса 13 немного больше (на 3-5 см) величины хода ползуна 3. Колесо 13 сцеплено с ведущей солнечной шестерней 10 дифференциала вместе с сателлитами 11, В связи с 3TfiM солнечная шестерня 10 вьшолнена с широким венцом, взаимодействующим с сателлитами 11 и колесом 13о Средняя часть суммирующего рычага 4 вьшолнена в виде рамки 14 (или кольца), сквозь которую проходит тяга 5 ползуна 3. На поверхности тяги 5 (фиг. 2 и 3) выполнен радиальный кольцевой паз 15. Рамка 14 суммирующего рычага 4 с помощь.ю соос ных пальцев 16 и 17, входящих в паз 15, шарнирно соединена с тягой
9
5
0
5
0
S
0
5
5, что позволяет ползуну 3 осуществлять сложное движение (вращательное с возвратно-поступательным). Колеса 18 и 19 (фиг« 5) связьшают кривошип 1 и солнечное колесо 12 с приводным двигателем и приводом управления ходом ползуна соответственно (не показаны) .
Предлагаемый механизм позволяет осуществлять либо сложное движение, либо простое возвратно-поступательное. Для этого он снабжен устройством для селективного выбора вида движения (фиг. 4).
Коническое колесо 13, установленное наружной частью 20 ступицы в подшипниках в корпусе 21 механизма, связано с тягой-5 ползуна 3 через подшипники 22 и внутреннюю часть 23 ступицы, жестко соединенную с тягой 5, например, с помощью ишицевого соединения. Отверстия в наружной части 20 и и внешняя поверхность внутренней части 23 ступицы колеса 13 вьтолнены коническими с одинако- вь1м., но противоположным углом наклона и в них нарезаны шлицы, например, треугольного сечения. Таким образом, части ступицы 20 и 23 образуют вместе кольцевой конический шлицевой паз 24. В корпусе 21 механизма неподвижно укреплен электромагнит 25 электромагнитной шлицевой муфты с цилиндрическим полым якорем 26, сквозь который проходит тяга 5. Якорь 26 снабжен неферромагнитной надставкой 27, внутренняя и внешняя поверхности которой вьтолнены коническими аналогично пазу 24 и снабжены шлицами, ответными шлицам этого паза.
Якорь 26 снабжен пружиной 28 растяжения, один конец которой занево- лен Б надставке 27, а другой - в корпусе 21 механизма.
Механизм работает следующим образом (фиг„ 1).
При вращении кривошипа 1 движение через солнечную шестерню 10 и сателлиты 11 дифферентдиала передается кривошипу 2,, а через шатуны 6 и 7 и рычаг 4 - ползуну 3, в результате чего последний получает возвратно-поступательное перемещение. Одновременно от солнечной шестерни 10 получает вращение колесо 13, которое вращает тягу 5, а вместе с ней и ползун 3. В итоге ползун 3 получает сложное движение, состоящее из вращательного и возвратно-поступательного движений.
31
в положении якоря 26, показанном на фиг. 4, механизм преобразует вращательное движение в возвратно- поступательное, так как при вращении колеса 13 вращательное движение тяге 5 не передается и это колесо вращается в подшипниках вхолостую. При по даче напряжения на обмотку электромагнита 25 последний срабатывает, и якорь 26 втягивается внутрь электромагнита, осуществляя пшицевое соединение колеса 13 с внутренней частью .23 ступицы. Таким образом колесо 13
378314
оказывается соединенным с тягой 5 посредством двойного питицевого соединения. При этом механизм осуществляет преобразование вращательного , движения в сложное.
При необходимости обратно перейтЯ от сложного движения к простому возвратно-поступательному отключают 10 электромагнит 25, При этом пружина 28 отбрасьгаает якорь 26 в нижнее положение, и пшицевая связь колеса 13 с тягой 5 прекращается.
Фиг. 5
Фиг. 2
/5
л
1
L
Редактор Т.Митейко
Составитель В.Савицкий
Техред О.Гортвай Корректор Е.Сирохман
Заказ 3271/37Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг. 5
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1982 |
|
SU1033796A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
