lit
L
СД
4 СО СО 4:
143
Изобретение относится к машиностроению,, а именно к шарнирно- рьгчажным механизмам,, к может быть использовано в различных устройствах где требуется преобразование вращательного движения в возвратно-посту- патедьное или сложное двиясение, состоящее из вращательного к возвратно- поступательного или колебательного и возвратно-поступательного движений является дополнительным к основному автосв. № 1337586.
Цель изобретения - расширение ки- нематическргх возмолшостей механизма за счет получения дополнительного сложного движения, состоящего из возвратно-поступательного и колебательного движений.
На фиг. 1 показана кинематическая схема механизма; на фиг- 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 1.
Механизм содержит два соосных кривошипа 1 и 2, шарнирно связанных с концами шатунов 3 и 4 соответственно. Другие концы шатунов 3 и 4 связаны.с соответствующими концами сзтммирующего рычага 5 через шарниры 6 и 7. Рычаг 5 выполнен из немагнитного материала.
В прямолинейной направляющей 8 основания 9 размещен ползун 10, связанный с рычагом 5 тягой 11, выпол- ненной из ферромагнитного материала.
Механизм содержит дифференциал, солнечное колесо 12 которого жестко связано с кривошипом t,, сателлит 13 жестко связан с кривошипом 2, а сол- нечное колесо 14 свободно вращается на оси кривошипа 2 и взаимодействует с приводом управления (не показан).
Зубчатое колесо 15 связано с тягой 11 шлицевым соединением, управля .емым электромагнитной муфтой 16 Сфиг. 4), и взаимодействует с солнечным колесом 12, имеюгщм для этого удлиненный венец.
Средняя часть суммирующего рычага 5 выполнена в виде рамки 17, сквозь которую проходит тяга 11, в которой выполнена кольцевая проточка 18. Рамка 17 одновременно является неподвижным магнитопроводом электромагнит- ной муфты 19 управления пальцами 20, которые установлены в двух противоположных сторонах pat iKH 17 и периодически взаимодействуют с кольцевой
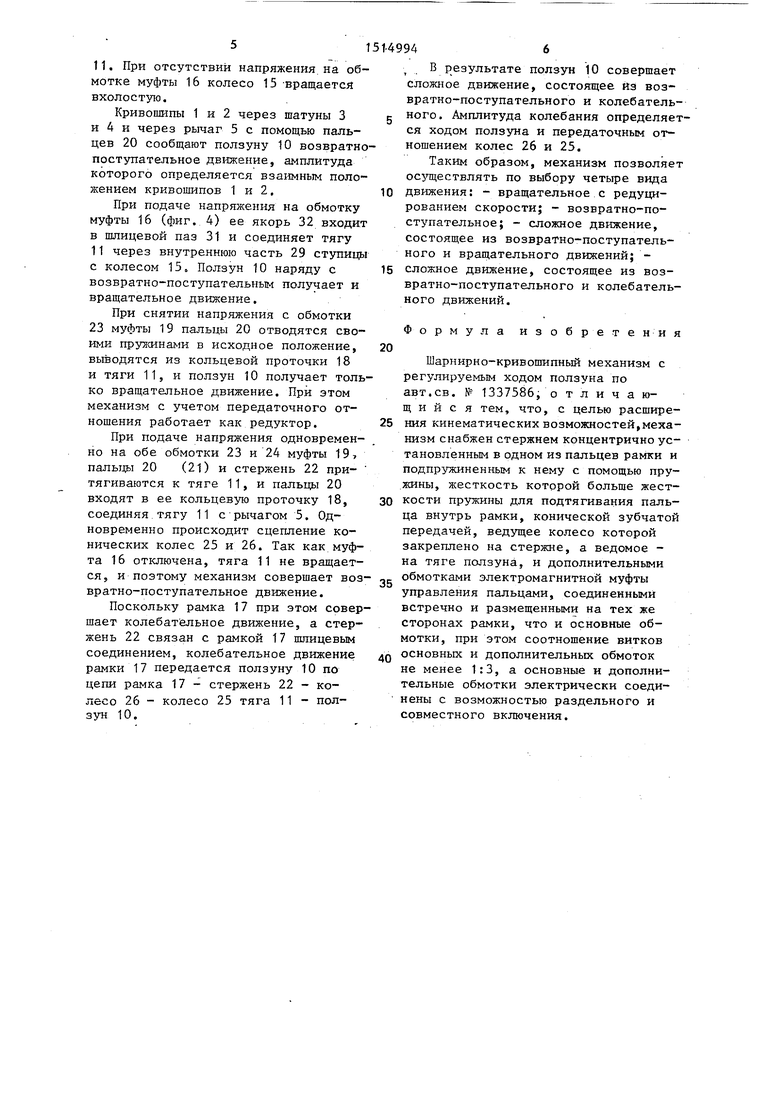
проточкой 18 тяги 11, Один из пальцев 20 выполнен двухзвенньп-. в виде стакана 21 и концентричного ему стержня 22, установленного внутри стакана 21 и связанного с ршчкой 17 шлицевьм соединением. Каждое из - звеньев 21 и 22 притягивается внутрь рамки 17 отдельной пружиной, при этом жесткость пружины стерлшя 22 не менее чем в 3-4 раза больше и есткос- ти пружины стакана 21.
Муфта 19 имеет основную и дополнительную обмотки с большой разницей (не менее чем в 3-4 раза) в число витков обмоток. Обмотки 23 (с малым числом витков) и 24 (с большим числом витков) имеют калсдая по две части, которые по отдельности размещены на двух сторонах , не имеющих пальцев 20, и соединены между собой встречно. Обмотки. 23 и 24 имеют возможность раздельного и совместного включения.
Механизм снабжен конической зубчатой передачей, ведомое колесо 25 которой закреплено на тяге 11 ползуна 10, а ведущее колесо 26 закреплено на наружном конце стержня 22 пальца 20 муфты 19.
Для центрирования рамки ,17 относительно тяги 11 на рамке 17 закреплен упругий фиксатор 27, выпол- ненньш, например, в виде подпру7ки- ненных к тяге 11 шариков 28.
Ступица колеса 15 (фиг. 4) выполнена из двух частей, внутренняя часть 29 которой имеет возможность свободного вращения относительно колеса 15 и жестко связана с тягой 11.
Наружная 30 и внутренняя 29 части ступицы образуют конический кольцевой паз 31 со птицами, с которыми взаимодействует якорь 32 электромагнитной Муфты 16, имеюгций наружные пшицы, аналогичные шлица.м паза 31. При отключенной муфте 16 якорь 32 выведен из паза 31 прулшпой 33.
Механизм работает следую1цим образом.
При подаче напряжетшя па основную обмотку 23 муфты 19 с мa. ЧР-СЛОМ витков пальцы 20 входят в кольцевую проточку 18 тяги 11 и соединяют ее с рычагом 5, Солнечное колесо 12 вращает сателлит 13 и колего 15„ От сателлита 13 с водилом полумает праще- ние кривошип 2, а от колеса 15 при включенной муфте 1б - врс ияенио тяг я
11. При отсутствий напряжения на обмотке муфты 16 колесо 15 -вращается вхолостую.
Кривошипы 1 и 2 через шатуны 3 и 4 и через рычаг 5 с помощью пальцев 20 сообщают ползуну 10 возвратно поступательное движение, амплитуда которого определяется взаимным положением кривошипов 1 и 2,
При подаче напряжения на обмотку муфты 16 (фиг. 4) ее якорь 32 входит в шлицевой паз 31 и соединяет тягу 11 через внутреннюю часть 29 ступицы с колесом 15. Ползун 10 наряду с возвратно-поступательным получает и вращательное движение.
При снятии напряжения с обмотки 23 муфты 19 пальцы 20 отводятся своими пружинами в исходное положение, выводятся из кольцевой проточки 18 и тяги 11, и ползун 10 получает только вращательное движение. При этом механизм с учетом передаточного отношения работает как редуктор.
При подаче напряжения одновременно на обе обмотки 23 и 24 муфты 19 палыда 20 (21) и стержень 22 притягиваются к тяге 11, и пальцы 20 входят в ее кольцевую проточку 18, соединяя тягу 11 с рычагом 5. Одновременно происходит сцепление конических колес 25 и 26. Так как муфта 16 отключена, тяга 11 не вращается, и поэтому механизм совершает воз
вратно-поступательное движение.
Поскольку рамка 17 при этом совершает колебательное движение, а стержень 22 связан с рамкой 17 шлицевым соединением, колебательное движение рамки 17 передается ползуну 10 по цепи рамка 17 - стержень 22 - колесо 26 - колесо 25 тяга 11 - ползун 10.
В результате ползун 10 совершает сложное движение, состоящее из возвратно-поступательного и колебатель- ного. Амплитуда колебания определяется ходом ползуна и передаточным отношением колес 26 и 25.
Таким образом, механизм позволяет осуществлять по выбору четьфе вида движения: - вращательное с редуцированием скорости; - возвратно-поступательное; - сложное движение, состоящее из возвратно-поступательного и вращательного движений; - сложное движение, состоящее из возвратно-поступательного и колебательного движений.
Формула изобретения
Шариирно-кривошнпный механизм с регулируемым ходом ползуна по авт.св. № 1337586; о т л и ч а ю- щ и и с я тем, что, с целью расширения кинематических возможностей,механизм снабжен стержнем концентрично ус- тановленньп в одном из пальцев рамки и подпружиненньм к нему с помощью пружины, жесткость которой больше жесткости пружины для подтягивания пальца внутрь рамки, конической зубчатой передачей, ведущее колесо которой закреплено на стержне, а ведомое - на тяге ползуна, и дополнительными обмотками электромагнитной муфты управления пальцами, соединенными встречно и размещенными на тех же сторонах рамки, что и основные обмотки, при этом соотношение витков
основных и дополнительных обмоток не менее 1:3, а основные и дополнительные обмотки электрически соеди- нены с возможностью раздельного и совместного включения.
(9 23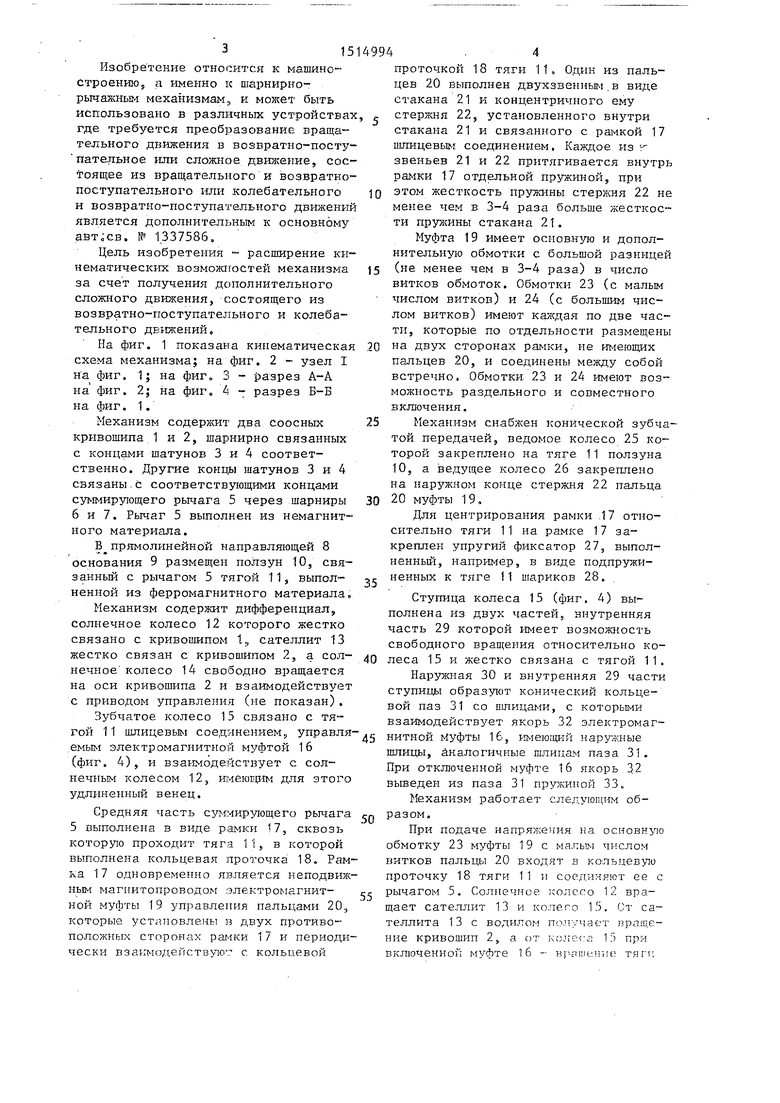
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1986 |
|
SU1337586A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1996 |
|
RU2110717C1 |
| Рычажно-зубчатый механизм для преобразования вращательного движения в сложное | 1988 |
|
SU1566130A1 |
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1985 |
|
SU1237831A1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1997 |
|
RU2132987C1 |
| Вышивальная машина | 1980 |
|
SU1044696A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Навивочное устройство автомата для изготовления спиральных пружин | 1977 |
|
SU657894A1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
Изобретение относится к машиностроению и может найти применение, в частности, в переналаживаемых автоматических системах. Цель изобретения - расширение кинематических возможностей механизма. Вращение ведущего колеса 12 через сателлит 13 и колесо 14 передается кривошипам 1 и 2, которые сообщают суммирующему рычагу 5 возвратно-поступательное движение. Размещенные в рамке 17 и управляемые электромагнитной муфтой соединительные пальцы входят в кольцевую проточку тяги 11 и возвратно-поступательное движение сообщается ползуну 10. При включении электромагнитной муфты 16 колесо 15, постоянно сцепленное с колесом 12, сообщает ползуну 10 и вращательное движение. При включении обеих обмоток электромагнитной муфты 19 при отключенной электромагнитной муфте 16 ползун получает сложное движение, состоящее из возвратно-поступательного и колебательного движений. Переключая муфты, сообщают ползуну различные движения. При отключении обеих муфт ползун сохраняет неподвижность. 4 ил.
К-А
20
Фиг. 3
ФиёЛ
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1986 |
|
SU1337586A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
