1
Изобретение относится к машиностроению, а именно к шарнирно-рычаж ньм механизмам, и может быть использовано в различных устройствах,где требуется преобразование вращательного движения в возвратно-поступательное или в сложное, состоящее из вращательного и возвратно-поступательного движений.
Цель изобретения - расширение кинематических возможностей механизма за счет размещения пальцев рамки с возможностью возвратно-поступательного перемещения.
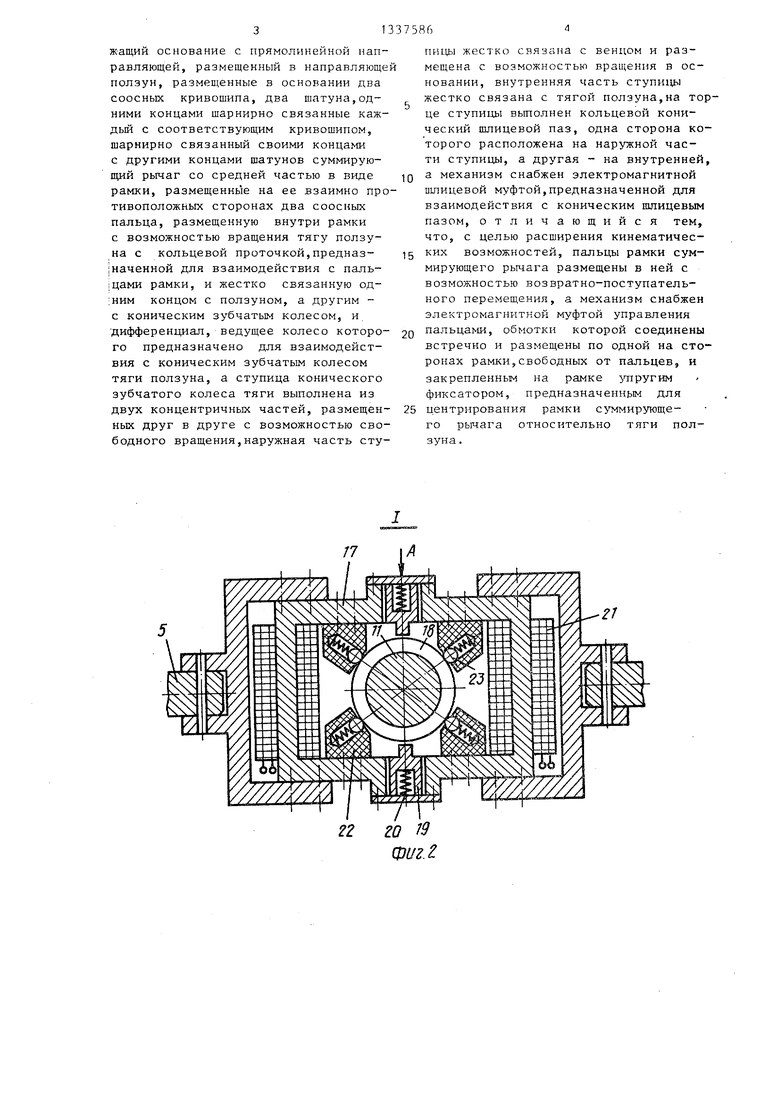
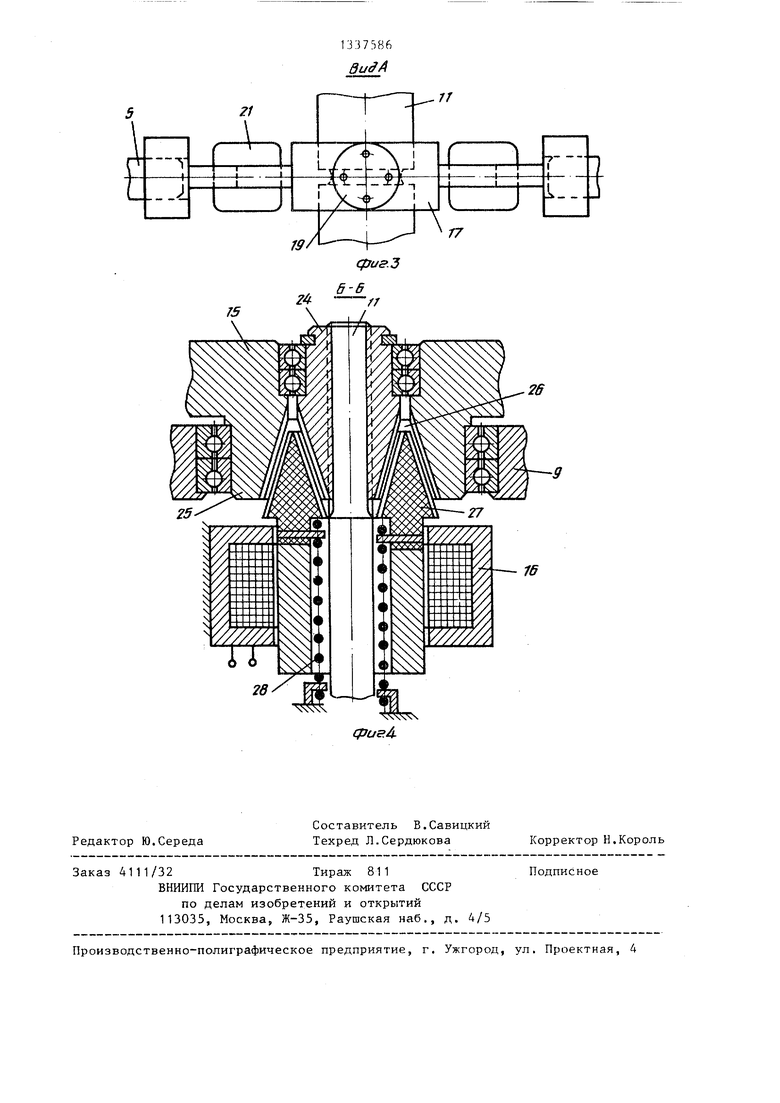
На фиг. 1 показана кинематическа схема механизма;на фиг. 2 - узел I на фиг. 1;на фиг. 3 - вид А на фиг.2 на фиг. А - сечение Б-Б на фиг. 1.
Механизм содержит два соосных кр вошипа 1 и 2, шарнирно связанных с концами шатунов 3 и 4, соответственно. Другие концы шатунов 3 и 4 связны с соответствующими концами суммирующего рычага 5 через шарниры 6 и Рычаг 5 выполнен из немагнитного материала.
Б прямолинейной направляющей 8 онования 9 размещен ползун 10, связаный с рычагом 5 тягой 11, выполненной из ферромагнитного материала.
Механизм содержит дифференциал, солнечное колесо 12 которого жестко связано соответственно с кривошипом 1, сателлит 13 жестко связан с кривошипом 2, а солнечное колесо 14 свободно вращается на оси кривошипа 2 и взаимодействует с приводом управления (не показан).
Зубчатое колесо 15 связано с тягой 11 шлицевым coeдинeниeмJуправляемым электромагнитной муфтой 16 (фиг. 4),и взаимодействует с солнечным колесом 12,имеющим для этого удлиненньш венец.
Средняя часть суммирующего рычаг 5 выполнена в виде рамки 17,сквозь которую проходит тяга 11,в которой выполнена кольцевая проточка 18. В двух противоположных сторонах рамки 17 размещены с возможностью возвратно-поступательного движения палцы 19, периодически входящие в кольцевую проточку тяги 11. Пружинами 20 пальцы 19 подтягиваются внутрь рамки 17. Пальцы 19 управляются элетромагнитной муфтой,обмотки 21 которой размещены на двух сторонах рамки 17, не имеющих пальцев 19, и сое
динены встречно. Для центрирования рамки 17 относительно тяги 11 на рамке 17 закреплен упругий фиксатор 22, выполненный, например, в виде подпружиненных в тяге 11 шариков 23.
Ступица колеса 15 выполнена из двух частей,внутренняя часть которой имеет возможность свободного вращения относительно колеса 15 и жестко связана с тягой 11. Наружная 25 и внутренняя 24 части ступицы образуют конический кольцевой паз 26 со шлицами, с которыми взаимодействует якорь 27
электромагнитной муфты 16, имеющий наружные шпицы,, аналогичные шлицам паза 26. При отключенной муфте 16 якорь 27 выведен из паза 26 пружиной 28.
Механизм работает следующим образом.
При подаче напряжения на обмотку 21 муфты пальцы 19 входят в кольцевую проточку 18 тяги 11 и соединяют
ее с рычагом 5., Солнечное колесо 12 вращает сателлит 13 и колесо 15. От сателлита 13 с водилом получает вращение кривошип 2, а от колеса 15 при включенной муфте 16 - вращение тяга
11, При отсутствии напряжения на об- мотке муфты 16 колесо 15 вращается вхолостую.
Кривошипы 1 и 2 через шатуны 3 и 4 и через рычаг 5 с помощью пальцев
19 сообщают ползуну 10 возвратно-поступательное движение, амплитуда которого определяется взаимным положением кривошипов 1 и 2,
При подаче напряжения на обмотку
муфты 16 ее якорь 27 входит в шлице- вой паз 26 и соединяет тягу 11 через внутреннюю часть 24 ступицы с колесом 15. Ползун 10 наряду с возвратно- поступательным получает и вращательное движение.
При снятии напряжения с муфты 21, пальцы 19 пружинами 20 выводятся из кольцевой проточки 18 тяги 11, и ползун 10 получает только вращательное движение. При этом механизм с учетом передаточного отношения будет работать как редуктор.
Снятие напряжения с муфт 16 и 21 одновременно приводит ползун 10 в состояние неподвижности.
Формула изобретения
Шарнирно-кривошипный механизм с регулируемым ходом ползуна, содержащий основание с прямолинейной направляющей, размещенный в направляюще ползун, размещенные в основании два соосных кривошипа, два шатуна,од ними концами шарнирно связанные каждый с соответствующим кривошипом, шарнирно связанный своими концами с другими концами шатунов суммирующий рычаг со средней частью в виде рамки, размещенные на ее взаимно противоположных сторонах два соосных пальца, размещенную внутри рамки с возможностью вращения тягу ползуна с кольцевой проточкой,предназ- |наченной для взаимодействия с паль- |цами рамки, и жестко связанную од- ;ним концом с ползуном, а другим - с коническим зубчатым колесом, и дифференциал, ведущее колесо которо- го предназначено для взаимодействия с коническим зубчатым колесом тяги ползуна, а ступица конического зубчатого колеса тяги выполнена из двух концентричных частей, размещен- ных друг в друге с возможностью свободного вращения,наружная часть ступии)1 жестко связана с венцом и размещена с возможностью вращения в основании, внутренняя часть ступицы жестко связана с тягой ползуна,на тоце ступицы выполнен кольцевой конический шлицевой паз, одна сторона которого расположена на наружной части ступицы, а другая - на внутренней а механизм снабжен электромагнитной пшицевой муфтой,предназначенной для взаимодействия с коническим шлицевым пазом, отличающийся тем, что, с целью расширения кинематических возможностей, пальцы рамки суммирующего рычага размещены в ней с возможностью возвратно-поступательного перемещения, а механизм снабжен электромагнитной муфтой управления пальцами, обмотки которой соединены встречно и размещены по одной на сторонах рамки,свободных от пальцев, и закрепленным на рамке зтгругим фиксатором, предназначенньм для центрирования рамки суммирующего рычага относительно тяги ползуна .
Изобретение относится к шарнир- но-кривошипным механизмам с регулируемым ходом ползуна, предназначено для сообщения ползуну по выбору или возвратно-поступательного, или вращательного, или одновременно обоих движений и найдет применение, в частности, в переналаживаемых автоматических системах. Цель изобретения расширение кинематических возможностей механизма. Вращение ведущего колеса 14 через сателлит 15 и колесо 12 передается кривошипам 1 и 2,которые сообщают суммирующему рычагу 5 возвратно-поступательное движение. Размещенные в рамке 17 и управляемые электромагнитной муфтой соединительные пальцы входят в кольпевую проточку тяги 11, и возвратно-поступательное движение сообщается ползуну 10, При включении другой электромагнитной муфты колесо 13, постоянно сцепленное с колесом 12, сообщает ползуну 10 и вращательное движение. Переключая муфты,сообщают ползуну различные движения. При отключении обеих муфт ползун сохраняет неподвижность. 4 ил, / с (Л 1U 00 со ел 00 а 8 Фиг. г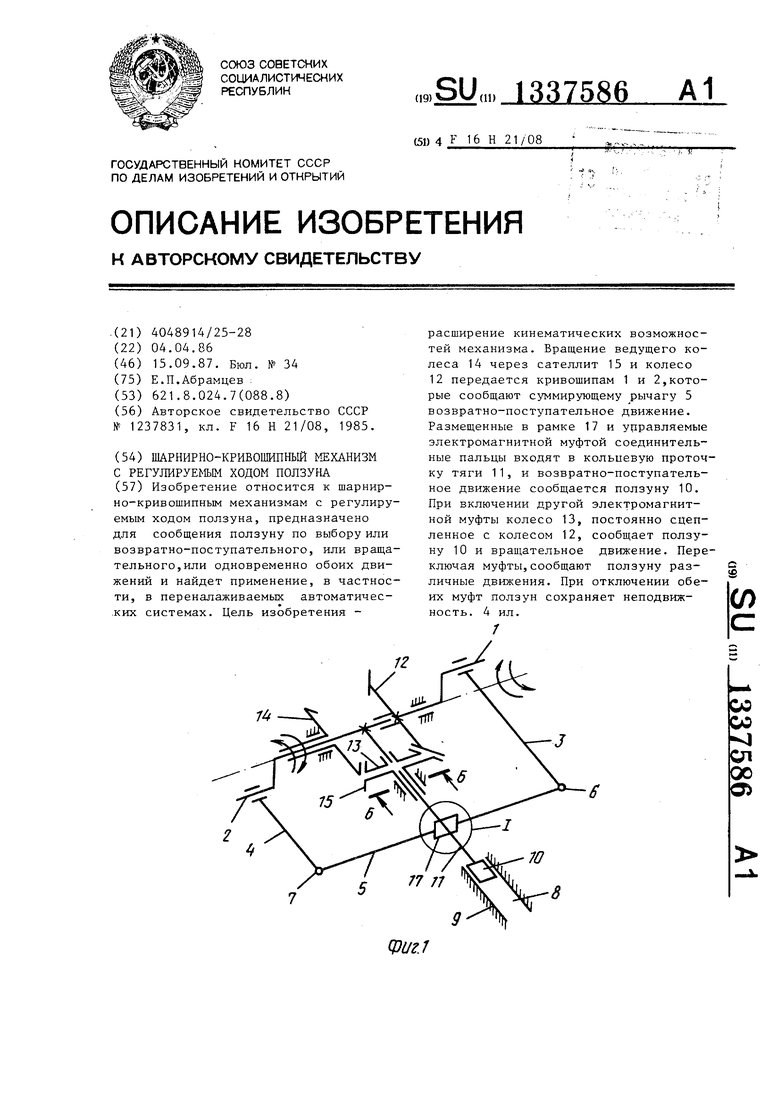
22 го 3 фиг. г
1337586
фиг.З
26
Редактор Ю.Середа
Составитель В.Савицкий Техред Л.Сердюкова
Заказ 4111/32Тираж 811Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фигА
Корректор И.КорОЛЬ
| Шарнирно-кривошипный механизм с регулируемым ходом ползуна | 1985 |
|
SU1237831A1 |
