Изобретение относится к автоматизированным системам и может найти применение в следящих электроприводах с фотоимпульсными датчиками положения, в частности металлорежущих станков с числовым программным управлением.
Цель изобретения - повышение помехозащищенности и надежности формирователя.
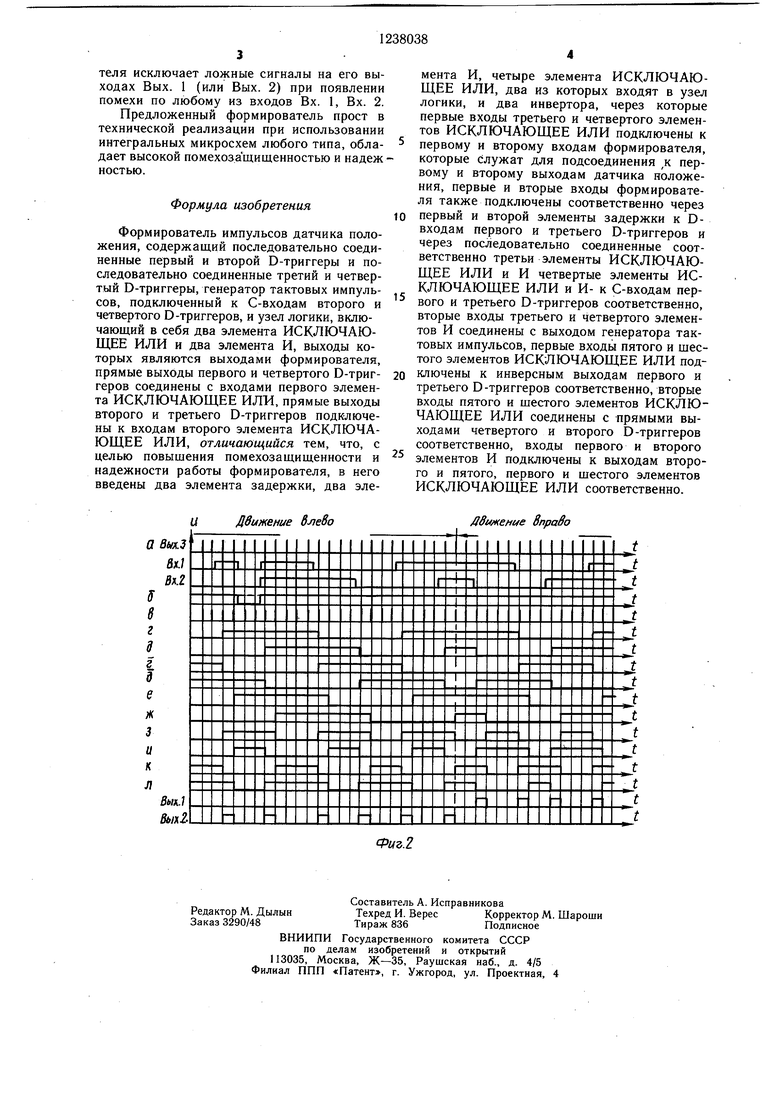
На фиг. 1 изображена схема формиро- вателя; на фиг. 2 - временные диаграммы работы формирователя.
Формирователь содержит D-триггеры 1 - 4, элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 5 и 6, элементы 7 и 8 задержки, элементы И 9 и 10, инверторы 11 и 12, генератор 13 тактовых импульсов, узел 14 логики, в состав которого входят элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 15-18 и элементы И 19 и 20.
На фиг. 2 обозначено: U - напряжение, t - время, а - выход генератора тактовых импульсов 13, Вх. 1 - вход 1 формирователя, Вх. 2 - вход 2 формирователя, б - выход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5, в - выход элемента И 9, г - прямой выход D-триггера , д - прямой выход D-триггера 1, г - инверсный выход D-триггера , д - инверсный выход D-триггера 3, е - прямой выход D-триггера 2, ж - прямой выход D-триггера 2,
Вх. 1
Вых. 11
1
О 1
1
1 О
в момент времени to при поступлении очередного сигнала по Вх. 1 D-триггер 1 устанавливается по его прямому выходу в «1. D-триггеры 3 и 4 в это время установлены по их прямым выходам в «О (см. фиг. 2). Период частотного сигнала тактового генератора 13 выбирается из условия Ti3 Siep,
Вх. 15 Вх. 16 Вх. 17 Вх.18 Вых. 15 Вых. 16 Вых. 17 Вых.18 Вых.1 Вых.2
1 О
0000
О 1
При нормальной работе в зависимости от направления вращения датчика положения (или направления перемещения в случае линейного датчика положения) на Вых. 2 (или Вых. 1) формируются импульсы единичного уровня длительностью, равной Tia.
При появлении помехи, например, в канале Вх. 1 (см. момент времени на фиг. 2) на выходе элемента 5 появляется сигнал
3, К, Л, м - соответственно выходы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 15-18, Вых. 1 - первый выход формирователя. Вых. 2 - второй выход формирователя, to - момент времени поступления очередного сигнала по входу 1, ti - момент времени появления помехи.
Формирователь работает следующим образом.
В исходном состоянии при неподвижном датчике положения независимо от состояния выходов всех четырех D-триггеров 1-4 на Вых. 1 и Вых. 2 сигналы нулевого уровня. Сигналы Вх. 1, Вх. 2 и имверсные через инверторы 11 и 12 по линии связи поступают от датчика положения на входы формирователя. При работе привода датчик положения, связанный кинематически с валом двигателя или осью объекта регулирования, приходит во вращение и на его выходах Вх. 1 и Вх. 2 появляются Сигналы единичного уровня. Сигналы Вх. 1, Вх. 2 поступают от датчика положения на входы формирователя. Сигналы Вх. 1 и Вх. 2 сдвинуты на 90 эл. град, а выходы инверторов 11, 12 инверсны по отношению к этим сигналам. При отсутствии помех в линии связи на выходах элементов 5 и 6 сигналы единичного уровня, что соответствует таблице истинности для элемента типа ИСКЛЮЧАЮЩЕЕ ИЛИ.
Вх. 2 Вых. 12
1 о 1
1 1
о
где Е пер - время переключения D-триггеров 1-4. С учетом этого на прямом выходе D-триггера 2 сигнал единичного уровня появляется со сдвигом . Опи- санному состоянию выходов D-триггеров 1 - 4 соответствует следующее состояние входов и выходов элементов 15-20 ( см. фиг. 2).
О
О
1
о
5
«О. Элемент 4 закрывается для прохождения импульсов генератора 13 на С-вход D-триггера 1, на его прямом выходе сохраняется сигнал единичного уровня. Для исключения ложного переключения, связанного с «гонкой сигналов при прохождении через элементы 5 и 9, установлен элемент временной задержки с +дТ9. Такое построение схемы формирователя исключает ложные сигналы на его выходах Вых. 1 (или Вых. 2) при появлении помехи по любому из входов Вх. 1, Вх. 2. Предложенный формирователь прост в технической реализации при использовании интегральных микросхем любого типа, обладает высокой помехозащищенностью и надеж ностью.
Формула изобретения
Формирователь импульсов датчика положения, содержащий последовательно соединенные первый и второй D-триггеры и последовательно соединенные третий и четвертый D-триггеры, генератор тактовых импульсов, подключенный к С-входам второго и четвертого D-триггеров, и узел логики, включающий в себя два элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и два элемента И, выходы которых являются выходами формирователя, прямые выходы первого и четвертого D-триггеров соединены с входами первого элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, прямые выходы второго и третьего D-триггеров подключены к входам второго элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, отличающийся тем, что, с целью повыщения помехозащищенности и надежности работы формирователя, в него введены два элемента задержки, два элеиДвижение Влево
S
г д
е ж
3
и к л
0
5
0
мента И, четыре элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, два из которых входят в узел логики, и два инвертора, через которые первые входы третьего и четвертого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ подключены к первому н второму входам формирователя, которые служат для подсоединения ,к первому и второму выходам датчика положения, первые и вторые входы формирователя также подключены соответственно через первый и второй элементы задержки к D- входам первого и третьего D-триггеров и через пос.ледовательно соединенные соответственно третьи элементы ИСКЛЮЧАЮЩЕЕ ИЛИ и И четвертые элементы ИСКЛЮЧАЮЩЕЕ ИЛИ и И- к С-входам первого и третьего D-триггеров соответственно, вторые входы третьего и четвертого элементов И соединены с выходом генератора тактовых импульсов, первые входь пятого и щес- того элементов ИСКЛЮЧАЮЩЕЕ ИЛИ подключены к инверсным выходам первого и третьего D-триггеров соответственно, вторые входы пятого и щестого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соединены с прямыми выходами четвертого и второго D-триггеров соответственно, входы первого и второго элементов И подключены к выходам второго и пятого, первого и щестого элементов ИСКЛЮЧАЮЩЕЕ ИЛИ соответственно.
ДВи/кенме Вправо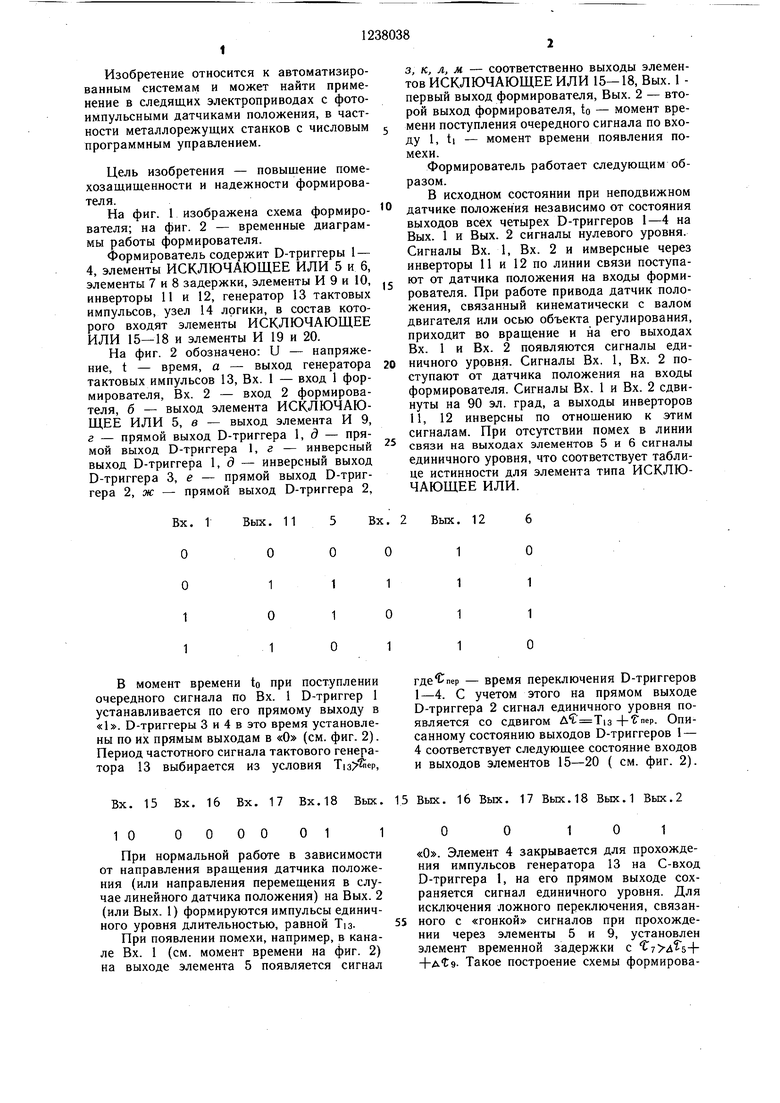
| название | год | авторы | номер документа |
|---|---|---|---|
| Формирователь импульсов датчика положения | 1991 |
|
SU1836661A3 |
| Преобразователь синусоидальных сигналов перемещения в код | 1984 |
|
SU1234968A1 |
| Преобразователь напряжения с защитой от перегрузок | 1989 |
|
SU1713051A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ИЗМЕНЯЮЩЕЙСЯ ТОЛЩИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2044314C1 |
| Измеритель временных интервалов | 1985 |
|
SU1307444A1 |
| Многоканальная система измерения и регистрации | 1988 |
|
SU1707546A1 |
| Устройство для контроля и управления глубинно-насосной установкой нефтяных скважин | 1988 |
|
SU1649569A1 |
| Резервированное многоканальное устройство для формирования тактовых импульсов | 1990 |
|
SU1714607A1 |
| Устройство для измерения суммарного расхода жидкостей и газа | 1983 |
|
SU1151822A1 |
| Система связи с ретрансляцией сообщений | 1987 |
|
SU1522417A1 |
Изобретение относится к области автоматизированных систем и позволяет повысить помехозащищенность и надежность работы формирователя. В исходном состоянии при неподвижном датчике положения независимо от состояния выходов всех четырех триггеров 1-4 на вых. I и вых. 2 сигналы нулевого уровня. При работе привода датчик положения приходит во вращение и на его выходах появляются сигналы единичного уровня, которые поступают на входы формирователя вх. 1, вх. 2. При нормальной работе в зависимости от направления вращения датчика положения (или направления перемещения в случае линейного датчика положения) на вых. 2 (или вых. 1) формируются импульсы единичного уровня. При появлении помехи, например,в канале вх. 1 на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 5 появляется сигнал «О, аяемент И 9 закрывается для прохождения импульсов тактового генератора 13 на С-вход триггера I, на его выходе сохраняется сигнал единичного уровня. Элемент задержки 7 исключает ложное переключение, связанное с «гонкой сигналов при прохождении сигналов через элементы ИСКЛЮЧАЮЩЕЕ ИЛИ 5 и И 9. 2 ил. СЛ
| Патент США № 3914677, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ПАРОПЕРЕГРЕВАТЕЛЬ ДЛЯ ПАРОВОЗНЫХ И ДРУГИХ ПОДОБНЫХ КОТЛОВ | 1924 |
|
SU3397A1 |
| RURZ BEI VORLIEGENDER OPTIMIE- RUNG фирмы BOSCH, ФРГ. | |||
