2, Рабочий орган по п, -1„ отличающийся тем, что привод перемещения дополнительной рамы выполнен в виде винтовой пары, кинематически связанной с гидромотором.
Изобретение относится к рабочим органам роторных снегоочистителей и может быть использовано для одновременной уборки снега в прилотковой полосе, и на части тротуара улицы.
Цель изобретения - пввышение эффективности путем расширения технологических возможностей.
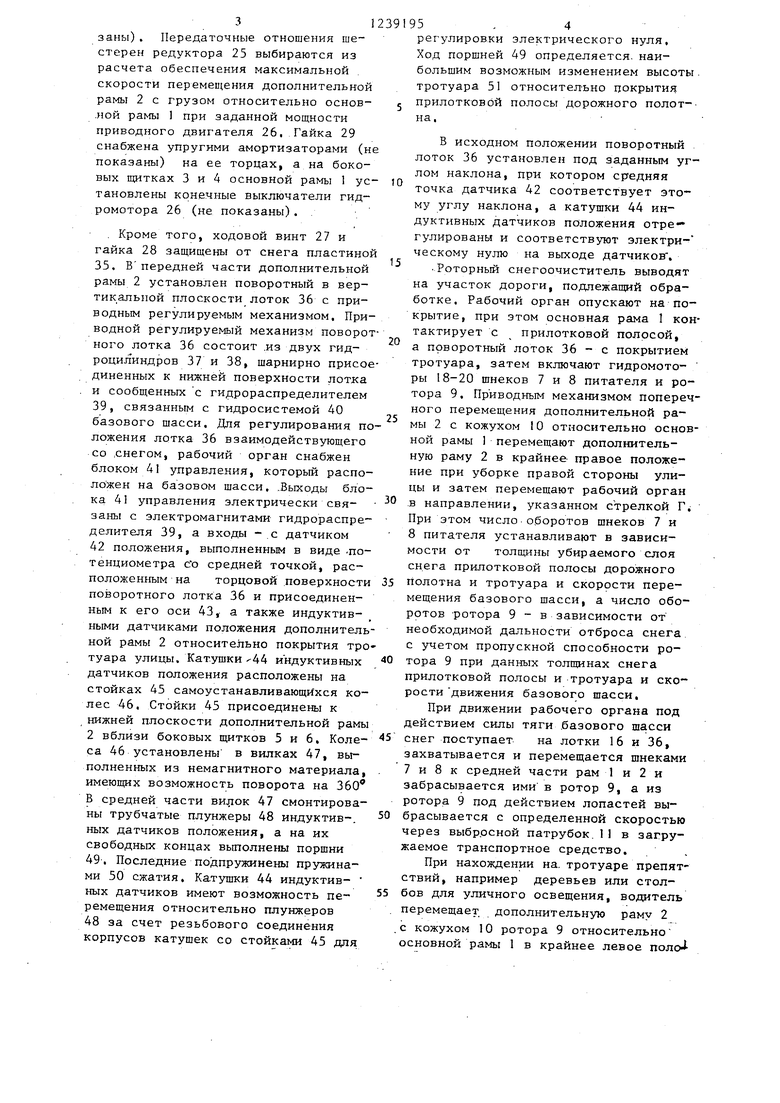
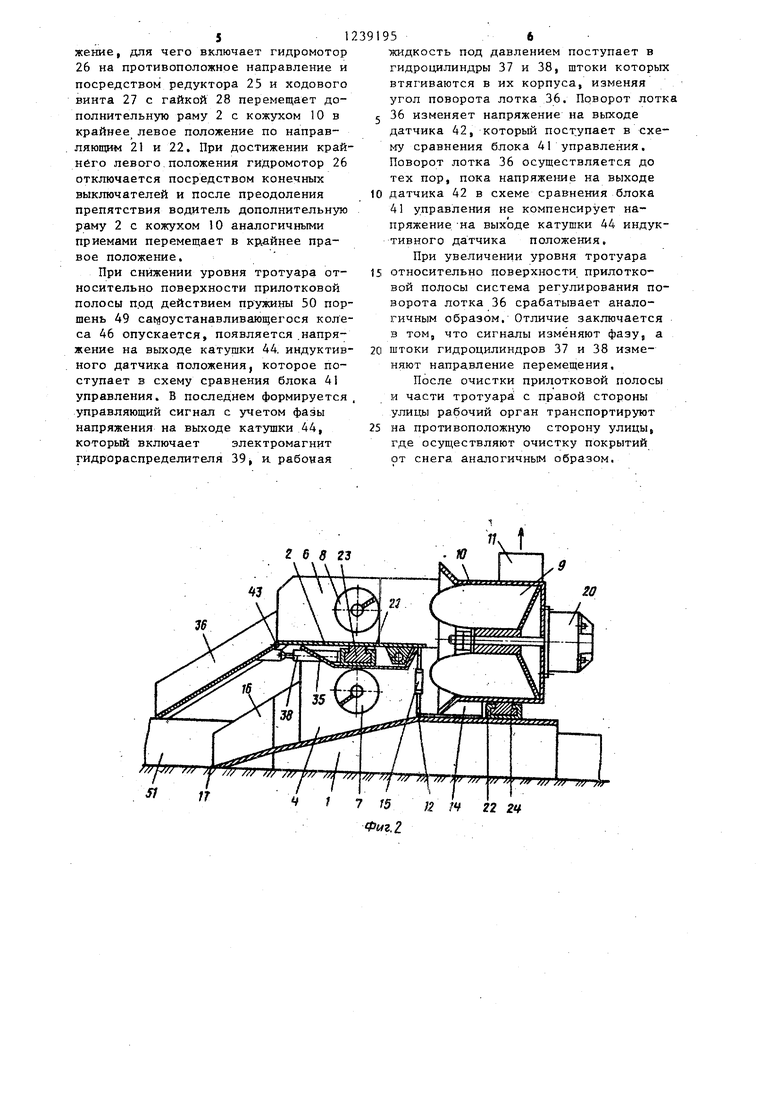
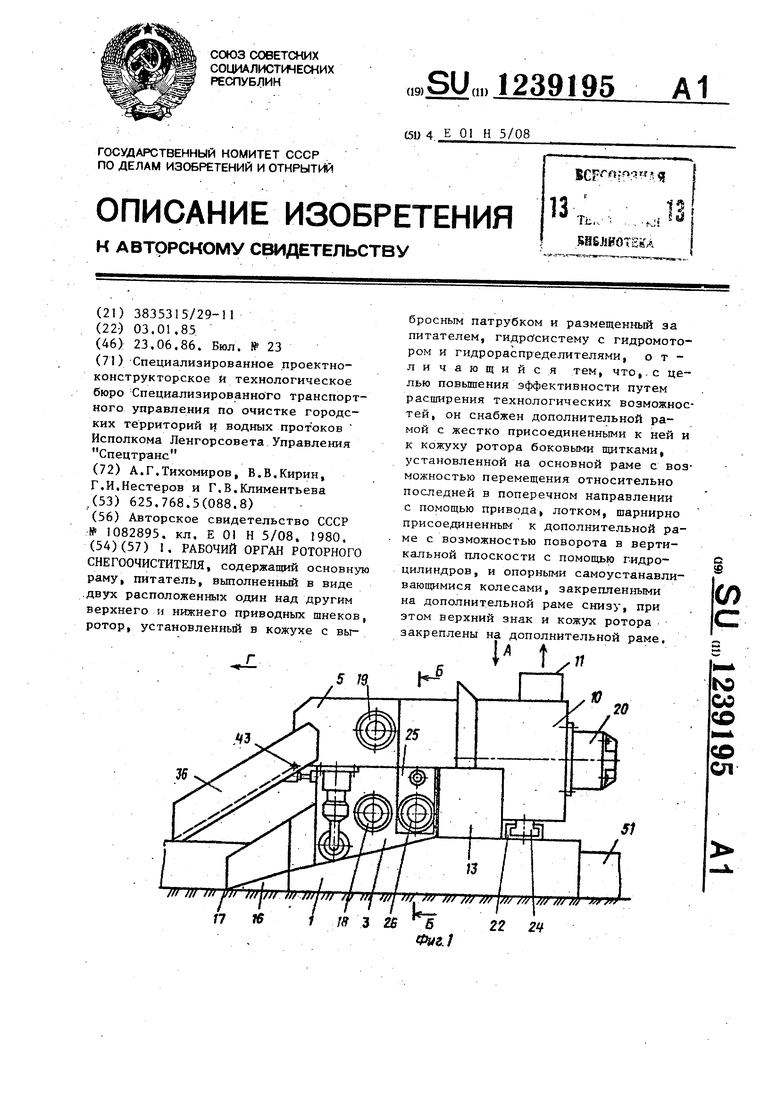
На фиг, 1 схематически изображен рабочий орган, роторного снегоочистителя, вид сбоку; на фиг. 2 - то же, продольный разрез; на фиг, 3 - вид А на фИ1р, U на фиг. 4 - разрез Б-Б на фиг, 1J на фиг, 5 - разрез В-В на фиг, 4j на фиг, 6 - принципиальная гидросхема.
Рабочий орган роторного снегоочистителя содержит установленные один над другим. основную 1 и дополнительную 2 рамы с жестко связанными с. ними -боковьми щитками 3-6, между которыми смонтированы нижний 7 и верхний 8 приводные шнеки питателя, имеющие левую и правую навивки лопастей а также ротор 9, установленный в кожухе 10 с выбросным патрубком 11, Передняя часть кожуха 10 выполнена прямоугольной формы, К боковьм щиткам 3 и 4.основной рамь 1 посредством осей 12 присоединены дополнитель ные секторообразные ;шитки 13 и 14 с двумя взаимно перпендикулярными плоскостями. Вертикальные плоскости щитков 13 и 14 взаимодействуют с кожухом 10 ротора 9, Щитки 13 и 14 прижаты к кожуху IО пруясинными механизмами 15. Задние торцы щитков 5 и 6 дополнитедьной рамы 2 жестко . присоединены к торцу верхней части кожуха 10 рото-ра 9.
Основная рама 1 в-передней части имеет расширяющийся лоток 16с режущей кромкой 17, Ширина дополнительной рамы 2 выполнена превышающей ширину основной рамы 1, Внутренние стенки основной 1 и дополни3, Рабочий орган по п, 1 , отличающийся тем, что ширина дополнительной рамы больше ширины основной рамы.
тельной 2 рам могут быть покрыты антифрикциэннь1м синтетическим материалом.
Шнеки 7 и 8 питателя, а также ротор 9 приводятся во вращение гидромоторами 18-20, соответственно связанными с гидросистемой базового шасси (не показана). Ротор 9 имеет криволинейные лопасти. Между рамами
1 и 2 и под кожухом 10 ротора 9 перпендикулярно к продольной оси основ.- ной рамы смонтированы направляющие 21 и 22, ползуны 23 и 24 которых закреплены соответственно на основании
дополнительной рамы 2 и на кожухе 10, установленном на раме 2, Направляющие 21 и 22 предназначены для обеспечения возможности поперечного перемещения дополнительной рамы 2
с кожухом 10 относительно основной рамы 1, Плоскости трения направляющих 21 и 22 и ползунов 23 и 24 noKpij- ты также антифрикционным синтетическим материалом.
Возвратно-поступательное перемещение дополн 1тельной рамы 2 с кожухом 10 ротора 9 относительно основной рамы 1 осуществляется приводньм механизмом, состоящим из кинематически связанных между собой редуктора 25 с приводным гидромотором 26 и ходового винта 27 с гайкой 28. Ре- дуктор 25 установлен на боковом , ке 3 и состоит, из ведущей 29, промежуточной 30 и ведомой 31 цилиндрических шестерен, установленных на валиках 32-34, Валик 32 ведущей шестерни 29 связан с выходным валом гидроматора 26, а валик 34 ведомой
шестерни 31 связан с ходовым винтом 27, который установлен между боко- Bbflvffl щитками 3 и 4 основной рамы 1. Гайка 28 закреплена на основании дополнительной рамы 2, Валики редук-,
тора 25 и ходовой винт 27 установлены в подшипниках качения (не пока312391
заны), Передаточные отношения шестерен редуктора 25 выбираются из расчета обеспечения максимальной . скорости перемещения дополнительной рамы 2 с грузом относительно основ- j .ной рамы 1 при заданной мощности приводного двигателя 26, Гайка 29 снабжена упругими амортизаторами (не показаны) на ее торцах, а на боковых щитках 3 и 4 основной рамы 1 ус- ш тановлены конечные выключатели гидромотора 26 (не показаны).
. Кроме того, ходовой винт 27 и гайка 28 защищены от снега пластиной 35. В передней части дополнительной рамы 2 установлен поворотный в вертикальной плоскости лоток 36 с приводным регулируемым механизмом. Приводной регулируемый механизм поворотного лотка 36 состоит .из двух гидроцилиндров 37 и 38, шарнирно присоединенных к нижней поверхности лотка и сообщенных с гидрораспределителем 39, связанным с гидросистемой 40 базового шасси. Для регулирования положения лотка 36 взаимодействующего со ,снегом, рабочий орган снабжен блоком 41 управления, который расположен на базовом шасси. .Выходы блока 41 управления электрически сея- заны с электромагнитами гидрораспре- делителя 39, а входы - с датчиком 42 положения, выполненным в виде -потенциометра с о средней точкой, расположенным на торцовой поверхности поворотного лотка 36 и присоединенным к его оси 43,- а также индуктивными датчиками положения дополнительной рамы 2 относительно покрытия тротуара улицы. Кат.ушки 44 индуктивных датчиков положения расположены на стойках 45 самоустанавливающИхся колес 46. Стойки 45 присоединены к нижней плоскости дополнительной рамы 2 вблизи боковых щитков 5 и 6. Коле- са 46 установлены в вилках 47, выполненных из немагнитного материала, имеющих возможность поворота на 360 В средней части вилок 47 смонтированы трубчатые плунжеры 48 индуктив-. ных датчиков положения, а на их свободных концах выполнены поршни 49. Последние подпружинены пружинами 50 сжатия. Катушки 44 индуктив- ных датчиков имеют возможность пе- ремещения относительно плунжеров 48 за счет резьбового соединения корпусов катушек со стойками 45 для
j
5
0
5
95 . 4 регулировки электрического нуля. Ход поршней 49 определяется, наибольшим возможным изменением высоты. тротуара 51 относительно покрытия прилотковой полосы дорожного полот-- на.
В исходном положении поворотный лоток 36 установлен под заданным углом наклона, при котором средняя точка датчика 42 соответствует этому углу наклона, а катушки 44 индуктивных датчиков положения отре- гулированы и соответствзтот электри- ческому нулю на выходе датчиков .
Роторньй снегоочиститель выводят на участок дороги, подлежащий обработке. Рабочий орган опускают на покрытие, при этом основная рама 1 контактирует с прилотковой полосой, а поворотный лоток 36 - с покрытием тротуара, затем включают гидромоторы 18-20 шнеков 7 и 8 питателя и ротора 9. Приводным механизмом поперечного перемещения дополнительной ра- мы 2 с кожухом 10 относительно основной рамы 1 перемещают дополнительную раму 2 в крайнее правое положение при уборке правой стороны улицы и затем перемещают рабочий орган .в направлении, указанном стрелкой Г При этом число-оборотов шнеков 7 и 8 питателя устанавливают в зависимости от толщины убираемого слоя снега прилотковой полосы дорожного полотна и тротуара и скорости перемещения базового шасси, а число оборотов ротора 9 - в зависимости от необходимой дальности отброса снега с учетом пропускной способности ротора 9 при данных толш;инах снега прилотковой полосы и тротуара и ско рости движения базового шасси.
При движении рабочего органа под действием силы тяги .базового шасси снег поступает на лотки 16 и 36, захватывается и перемещается шнеками 7 и 8 к средней части рам 1 и 2 и забрасывается ими в ротор 9, а из ротора 9 под действием лопастей выбрасывается с определенной скоростью через выбросной патрубок.1 в загружаемое транспортное средство.
При нахождении на, тротуаре препятствий, например деревьев или столбов для уличного освещения, водитель перемещает, дополнительную раму 2 .с кожухом 10 ротора 9 относительно основной рамы 1 в крайнее левое .51
жение, для чего включает гидромотор
26 на противоположное направление и посредством редуктора 25 и ходового винта 27 с гайкой 28 перемещает дополнительную раму 2 с кожухом 10 в крайнее левое положение по направляющим 21 и 22. При достижении крайнего левого положения гидромотор 26 отключается посредством конечных выключателей и после преодоления препятствия водитель дополнительную раму 2 с кожухом 10 аналогичными приемами перемещает в кр айнее правое положение.
При снижении уровня тротуара относительно поверхности прилотковой полосы под действием пружины 50 поршень 49 саг оустанавливающегося колеса 46 опускается, появляется .напряжение на выходе катушки 44. индуктивного датчика положения, которое поступает в схему сравнения блока 41 управления. В последнем формируется управляющий сигнал с учетом фазы напряжения на выходе катушки 44, который включает электромагнит гидрораспределителя 39, к рабочая
39195б
жидкость под давлением поступает в гидроцилиндры 37 и 38, штоки которых втягиваются в их корпуса, изменяя угол поворота лотка 36. Поворот лотка 5 36 изменяет напряжение на вьпсоде датчика 42, которьй поступает в схему сравнения блока 41 управления. Поворот лотка 36 осуществляется до тех пор, пока напряжение на выходе
10 датчика 42 в схеме сравнения блока 41 управления не компенсирует напряжение -на выходе катушки 44 индуктивного датчика положения.
При увеличении уровня тротуара
15 относительно поверхности прилотковой полосы система регулирования поворота лотка 36 срабатывает аналогичным образом. Отличие заключается в том, что сигналы изменяют фазу, а
20 штоки гидроцилиндров 37 и 38 изменяют направление перемещения.
После очистки прилотковой полосы и части тротуара с правой стороны улицы рабочий орган транспортируют
25 на противоположную сторону улицы, где осук1ествляют очистку покрытий от снега аналогичным образом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган роторного снегоочистителя | 1984 |
|
SU1208124A1 |
| Снегоочиститель | 1982 |
|
SU1040032A1 |
| Роторный снегоочиститель | 1984 |
|
SU1208125A1 |
| СНЕГОУБОРОЧНАЯ МАШИНА | 1996 |
|
RU2143027C1 |
| Подметально-уборочная машина | 1989 |
|
SU1700130A1 |
| АВТОНОМНАЯ МОБИЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА ДЛЯ ОЧИСТКИ СНЕГА | 2019 |
|
RU2730666C1 |
| ФРЕЗЕРНЫЙ СНЕГООЧИСТИТЕЛЬ | 1992 |
|
RU2032787C1 |
| Подметально-уборочная машина | 1988 |
|
SU1602922A1 |
| СНЕГОУБОРОЧНАЯ МАШИНА | 2015 |
|
RU2591726C1 |
| Рабочий орган снегоочистителя | 1986 |
|
SU1312128A1 |

г б 5 Z3
je
ZO
22 2V
48
. Составитель Т.Кашликова Редактор Н.Яцола Техред М.Ходанич
Заказ 3359/23 Тираж 514Подписное
ВНИИПЙ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое,предприятие, г. Ужгород, ул. Проектная, 4
Корректор О,Луговая
| Рабочий орган снегоочистителя | 1980 |
|
SU1082895A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
