Изобретение относится к измерительной ехнике и может быть использовано для опеделения неуравновешенности роторов углоых акселерометров при их статической баланировке.
Цель изобретения - повышение точности алансировки ротора, закрепленного на жестом упрутом подвесе, который обеспечивает аботоспособность углового акселерометра жестких условиях эксплуатации.
Повышенная точность балансировки обеспеивается за счет компенсации жесткости упругого подвеса кручению.
На фиг. 1 представлена конструктивная схема установки для реализации предлагаемого способа; на фнг. 2 - ротор углового аксе. лерометра на упругом подвесе, вариант; на фиг. 3 - графики выходного нагфяжения преобразователя перемещения ротора бапансируе- емого углового акселерометра при плавном вращении прибора в горизонтальном положе, НИИ оси упругого подвеса ротора.
Предлагаемый способ осуществляется с помощью испытательной установки (фиг. 1), которая содержит поворотное устройство 1, оправку 2 для крепления акселерометра 3, в корпусе которого на упругих подвесах 4 закреплен ротор 5, преобразователь 6. углового перемещения ротора, генератор 7 с регулируемой амплитудой выходного сигнала и регистратор 8 выходного сигнала с преобразователя перемещения.
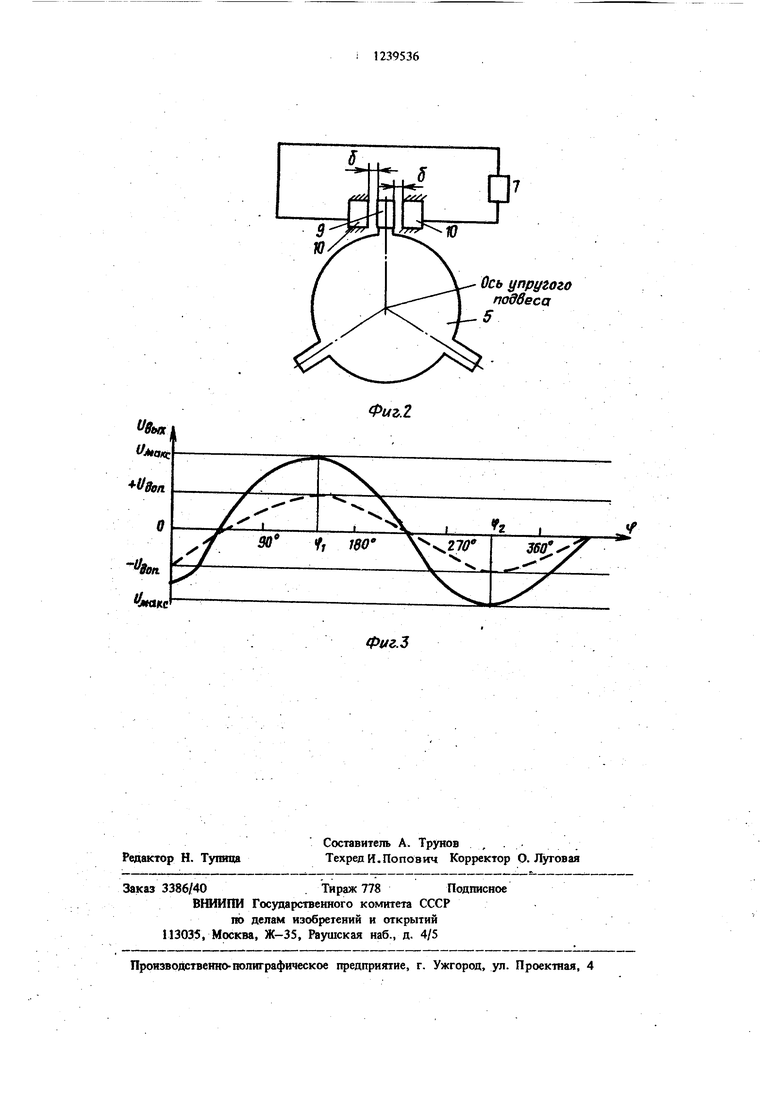
Кроме того, обозначены (фиг. 2): ротор 5 углового акселерометра с подвижным элементом 9 преобразователя злглового переме- щения, неподвижные элементы 10 преобразователя углового перемещения, зазор S между элементами преобразователя перемещения.
Балансировка ротора углового акселерометра производится следующим образом.
Балансируемый акселерометр устанавливается с помощью поворотного устройства в положение, в котором ось упругого подвеса ротора вертикальна (фиг. I Q ).
Момент сопротивления кручению упругого подвеса компенсируется моментом сил взаимодействия между подвижным и непод- вижнь1м элементами преобразователя углового перемещения. Противодействующий момент сопротивления упругого подвеса компенсируется до тех пор, пока при приложении к ротору момента, равного требуемой неурав- новещенности ротора, на выходе преобразователя перемещения появится сигнал величиной, достаточной для регистрации имею- щимися средствами. Момент к ротору прикладывается с помощью датчика момента, имеющегося в акселерометре, а в случае его отсутствия осуществляется приложением
2395361
известной силы на определенном расстоянии от оси вращения ротора.
Для создания нормированной силы, прикладываемой к ротору на определенном рас-
J стоянии от его оси вращения, можно, например, использовать струю воздуха, выходящую из сопла. Сила, создаваемая струей воздуха, заранее определяется в зависимости от давления воздуха и расстояния от сопла,
0 из которого выходит воздух, до места на роторе, на которое попадает струя воздуха. Величину компенсирующего момента регулируют изменением напряжения питания емкостного или индуктивного преобразователя
f J перемещения, подаваемого на неподвижные элементы от генератора с регулируемой амплитудой выходного сигнала, а также изменением зазора между элементами 1фербразова- теля перемещения. В качестве неподвиж2Q ных элементов могут использоваться как штатные элементы преобразователя перемещения, так и специальные, которые допускают АЧЧ на них сигнала большой амплитуды. Балансируемый акселерометр устанавливает25 ся с помощью поворотного устройства в положение, при котором ось упругого подвеса ротора горизоигтальна (фиг. IS ), и плавно поворачивается вокруг оси ynpjToro подвеса в пределах 360°.
30
I
35
40
45
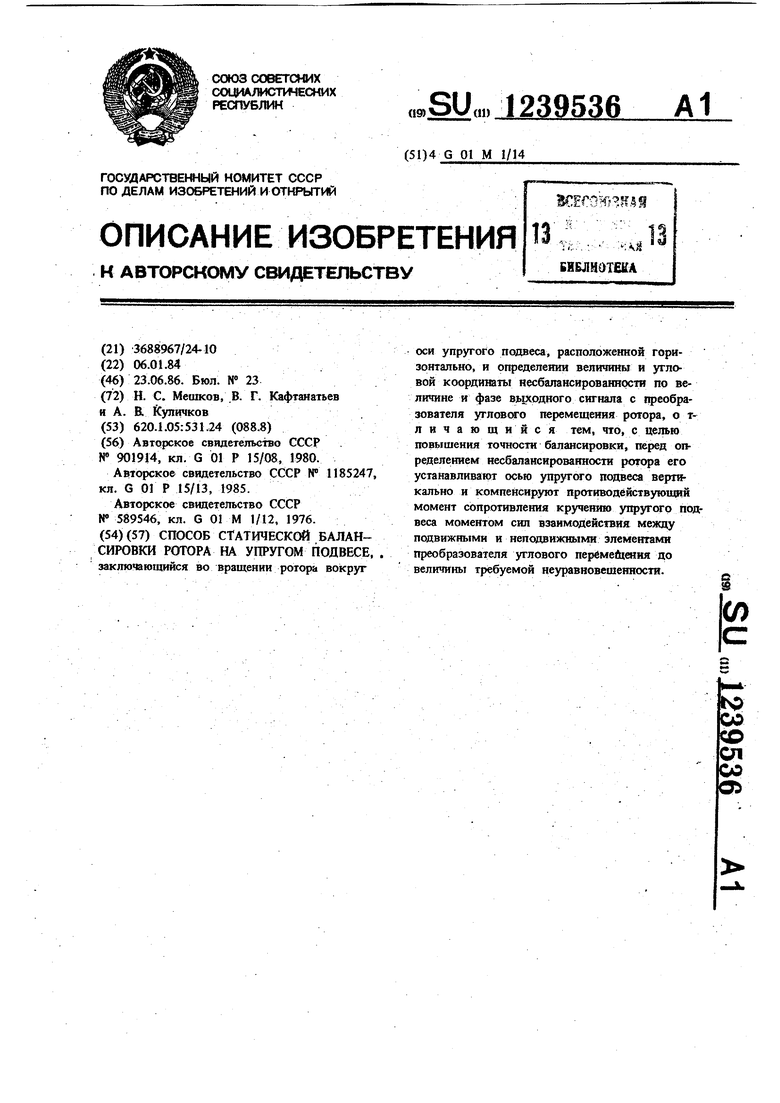
При повороте рото;-а в пределах угла V О-ЗбО при наличии его неуравновешенности на выходе преобразователя перемещения появится сигнал Овых зависящий от углового положения ротора (фиг. 3).
По амплитуле и фазе выходного сигнала с емкостного или индуктивного преобразователя перемещения определяют, величину и угловую координату неуравновешенности ро тора, которую удаляют любым известным способов.,
Наличие Омакс мин говорит о наличии неуравновешенности ротора, а соотношения имакс Удоп и UMHH - доп - о превышении неуравновешенности допустимой величины; углы 3, и 3, определяют угло
вую координату неуравновешенности ротора.
Последовательным удалением неуравновешенности любым известным способом и поворотом акселерометра или чувствительного элемента в пределах угла У 0-360° добиваются, чтобы UMSKC и стали меньше + идоп и - Кдоп соответственно.
Получение указанного соотношения говорит о том, что неуравновешенность ротора не превышает допустимую Мнеб Мдоп, н процесс балансировки закончен.
Так как предлагаемый способ позволяет обеспечить прецизионную балансировку, то
первоначально ротор должен балансироваться любым известным способом до величины ЫО Н см.
При подаче напряжения питания емкостного или индуктивного преобразователя перемещения ротора балансируемого углового акселерометра от генератора с регулируемой амплитудой выходного сигнала непосредственно на неподвижные элементы преобразователя характеристика создаваемой при этом отрицательной жесткости будет нелинейной, тогда как характеристика жесткости упругого подвеса ротора линейна. Поэтому в случае появления на выходе преобразователя перемещения сигнала искаженной формь при повороте ротора в пределах 360° вокруг оси вращения упругого подвеса при горизон
;Тальном его положении, необходимо ось
упругого подвеса и ось вращения поворотного устройства установить под таким углом к горизонту, чтобы форма сигнала была близка к синусоидальной. После балансировкн ротора угол наклона оси упругого подвеса и оси вращения пово ютного устройства к горизонту уменьшают и вновь проводят балансировку ротора предлагаемым способом. Окончательную балансировку ротора проводят при горизонтальном положении оси упругого подвеса и оси вращения поворотного устройства. Если создание отрицательной жесткос ти производится в соответствии с известным, то предлагаемый способ реализуется при повороте балансируе1 ого акселерометра -из положения (фиг. 1 q ) непосредственно в поло; жение (фиг. IS).

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО ДИСБАЛАНСА БЫСТРОВРАЩАЮЩИХСЯ ТЕЛ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085847C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |
| Устройство для балансировки роторов | 1985 |
|
SU1296877A1 |
| СТАНОК ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1993 |
|
RU2105962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ДИСБАЛАНСА | 1991 |
|
RU2016384C1 |
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
v.
Фиг.1
Ось упругого
подвеса 5
Редактор Н. Тупица
Составитель А. Трунов , . .
Техред И.Попович Корректор О. Луговая
Заказ 3386/40. Тираж 778Подписное
ВНШ1ПИ Государственного колтотета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Пронзводственно-полиграфическое предприетие, г. Ужгород, ул. Проектная, 4
Фиг2
Фиг.Ъ
| Акселерометр | 1980 |
|
SU901914A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Компенсационный маятниковый акселерометр | 1983 |
|
SU1185247A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для статической балансировки роторов | 1976 |
|
SU589546A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
