10
15
20
25
I12411
Изобретение- относится к автоматическому управлению, в частности к поисковым устройствам упра вления нели- нейными динамическими объектами, динамические параметры которых заранее неизвестны или меняются в процессе работы.
Целью изобретения является упроще- цне системы и повьппение ее быстродействия. ,.
На фиг. 1 приведена структурная схема предлагаемой системы, на фиг.2 и 3 - структурные схемы возможных реализаций определителя знака приращения и стабилизатора .амплитуды. Система содерлсит релаксационньм
генератор 1, первьй триггер 2 со счетным входом, первьш интегратор 3 с изменяемым коэффициентом передачи, объект управления 4, дифференциатор 5, стабилизатор 6 амплитуды, определитель 7 знака приращения, второй триггер 8 со счетным входом, второй интегратор, 9.. и сумматор 10.
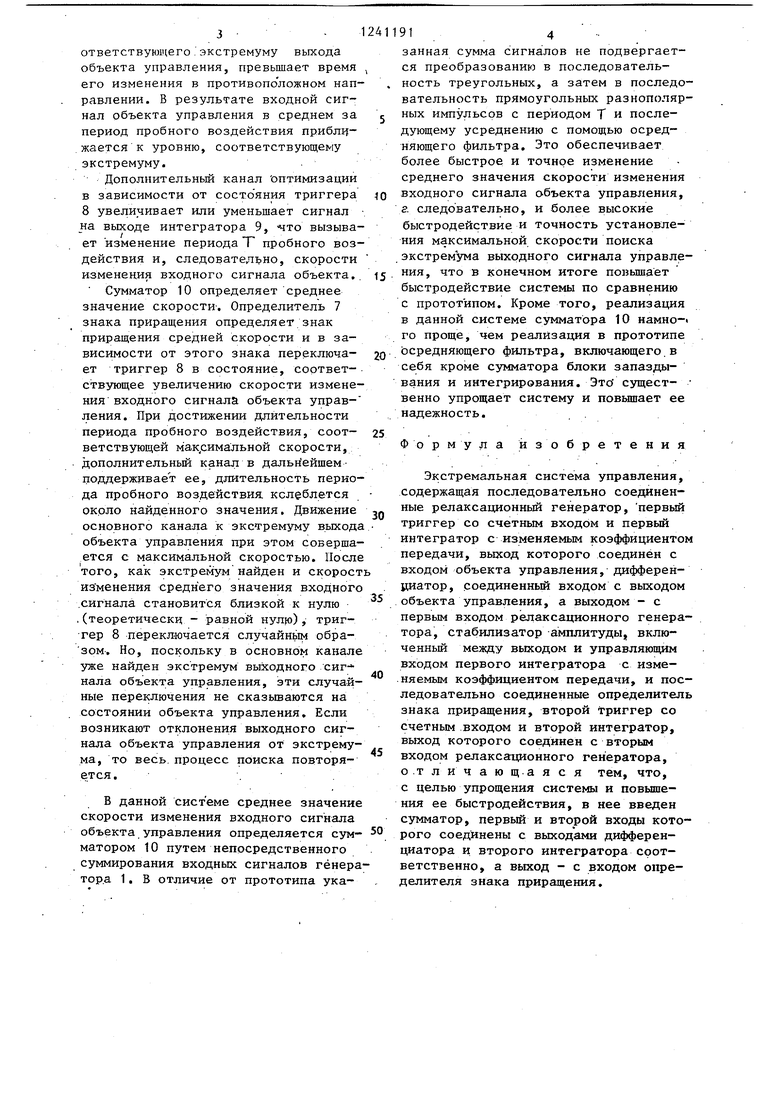
Определитель 7 знака приращения (фиг. 2) содержит .запоминающее.уст
ройство М, элемент 12 сравнения и
сигнум-реле 1.З.
ГГри работе определителя знака приращения запоминающее устройство 11 запоминает входной сигнал, только
при его.увеличении, на уменьшение входного сигнала оно не реагирует. Сиг- нал с запоминающего устройства непрерывно подается на элемент 12 сравнения, где срав нйвается с текущим значением входного сигнала. Разность запомненного и текущего значений поступает на сигнум-реле 13, И по
достижении зоны нечувствительности последнее срабатывает, и, изменяя свое состояние, одновременно .сбрасы-- вает запомненный в запоминающем уст- . ройстве -сигнал. Определитель 7 знака приращения определяет знак приращения средней скорости изменения входного сигнала, поступающий с сумматора 10, и. переключает триггер 8 лишь в том с лучае, если эта скорость меньшается. .
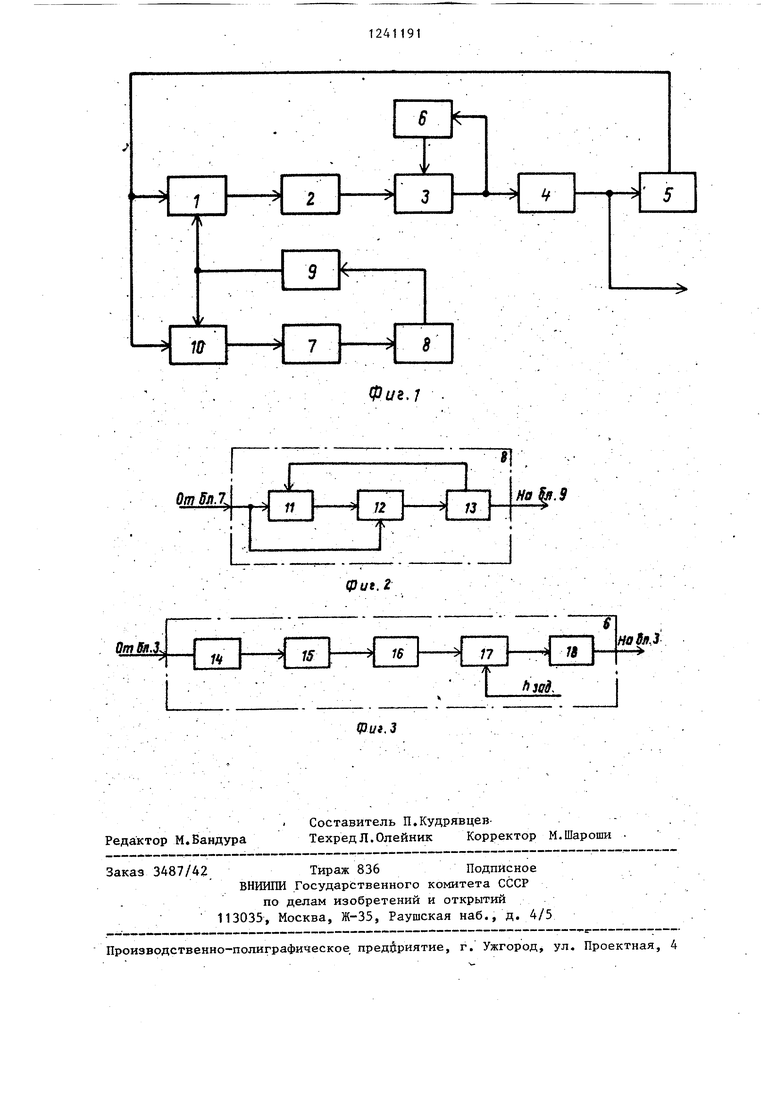
Стабилизатор 6 амплитуды (фиг. 3) содержит последовательно включенные
конденсатор 14, выпрямитель 15, ильтр 16 низких частот, элемент 17 сравнения и интегратор 18. Задача его - поддержать неизменной амплиту- у пробных воздействий интегратора 3 основного канала при изменении пеиода пробных воздействий. .
30
35
40
45
50
55
0
5
0
5
11
0
5
912
При работе стабилизатора конденсатор 14 вьщеляет из выходного сигнала интегратора 3 переменную составляющую, выпрямитель 15 выпрямляет ее, фильтр 16 выделяет из выпрямленного сигнала постоянную составляющую, которая пропорциональна амплитуде пробных воздействий h;; на входе объекта управления, в элементе.17 постоянная составляющая сравнивается с заданным значением амплитуды hjoco , ре- зультат сравнения интегрируется ин- .тегратором 18, и .сигнал с выхода интегратора 18, пропорциональный отклонениям амплитуды hx от заданного значения Ьзо8 поступает на управляющий вход интегратора 3. При этом изменяется коэффициент передачи интегратора 3, а амплитуда Ц поддерживается постоянной, равной
Система работает следующим образом.
Основной канал оптимизации осуществляет поис к экстремума выхода объек;та управления, работая с каким- то значением периода пробного воздействия, определяемьй суммой с.игна- дов на входах генератора 1. Генера- тор 1 преобразует сумму сигналов с вькода дифференциатора 5 и интегратора 9 в последовательность следующих друг за другом треугольных импульсов с длительностями Чн и fj , определяемыми и соотношения К сг-- К
г -г
-Ц Uo - Ux
Uo +
Ux
0
5
0
5
где К - коэффициент пропорциональности, и о опорное напряжение генерато
ра-1,
Ujc - .сумма сигналов, с выходов дифференциатора .5 и интегратора 9.
Триггер 2 преобразует сигнал с выхода генератора 1 в последовательность разнополярных прямоугольных импульсов одинаковой амплитуды с длительностями 1хд и L соответственно.
Интегратор 3 совместно со стаби-. лизатором 6 интегрирует последовательность разнополярных импульсов с выхода триггера 2. На выходе интегратора 3 образуется пипообразный
сигнал с периодом Т, равным Т . t + +1 , который поступает на вход объекта управления. При этом время .изменения входного сигнала объекта управления в направлении уровня, со3 - ответствующего экстремуму выхода объекта управления, превышает время его изменения в противоположном направлении. В результате входной сигнал объекта управления в среднем за период пробного воздействия приблч жается к уровню, соответствующему экстремуму.
Дополиительньш канал оптимизации в зависимости от состо яния триггера 8 увели чивает или уменьшает сигнал на выходе интегратора 9, «что вызывает изменение периода Т пробного воздействия и, следовател НО, скорости изменения входного сигнала объекта.
Сумматор 10 определяет среднее значение скорости-. Определитель 7 знака приращения определяет знак приращения средней скорости и в зависимости от этого знака переключа- ет триггер 8 в состояние, соответствующее увеличению скорости изменения входного сигнала объекта управ- ления. При достижении длительности периода пробного воздействия, соот- ветствующей максимальной скорости, дополнительный канал в дальн ейшем поддерживает ее, длительность периода пробного воздействия колеблется около найденного значения. Движение основного канала к экстремуму выхода объекта управления при этом совершается с максимальной скоростью. После того, как экстремум найден и скорост изменения средн его значения входного .сигнала становится близкой к нулю , (теоретически - равной нул|о), триггер 8 переключается случайньм обра- зом. Но, поскольку в основном канале уже найден экстремум выходного сиг- нала объекта управления, эти случайные переключения не сказьшаются на состоянии объекта управления. Если возникают отклонения выходного сигнала объекта управления от экстремума, то весь, процесс поиска повторяется..
В данной системе среднее значение скорости изменения входного сигнала объекта управления определяется сум- 50 матором 10 путем непосредственного суммирования входных сигналов гёнера- тор.а 1. В отличие от прототипа ука
4о 15
20 5 Q
5
0
5
0
1914
ванная сумма сигналов не подвергается преобразованирз в последовательность треугольных, а затем в последовательность прямоугольных разнополяр- ных импульсов с периодом Т и последующему усреднению с помощью осред- няющего фильтра. Это обеспечивает более быстрое и точное изменение среднего значения скорости изменения входного сигнала субъекта управления, г следовательно, и более высокие быстродействие и точность установления максимальной скорости поиска экстремума выходного сигнала управления, что в конечном итоге повышает быстродействие системы по сравнению с прототипом. Кроме того, реализация в данной системе сумматора 10 намно-« го проще, чем реализация в прототипе осредняющего фильтра, включающего.в себя кроме сумматора блоки запаздывания и интегрирования. Это cjraiecT- венно упрощает систему и повьшает ее надежность. . .
Формула изобретения
Экстремальная система управления, содержащая последовательно соединенные релаксационный генератор, первый триггер со счетным входом и первый интегратор с изменяемым коэффициентом передачи, вьщод которого соединён с входом объекта управления, дифферен- киатор, .соединенный входом с выходом объекта управления, а выходом - с первым входом релаксационного генератора, стабилизатор амплитуды, вклю- ченньй между выходом и управляющим входом первого интегратора с изменяемым коэффициентом передачи, и последовательно соединенные определитель знака приращения, второй триггер со счетным входом и второй интегратор, выход которого соединен с вторым входом релаксационного генератора, о.тличающаяся тем, что, с целью упрощения системы и повышения ее быстродействия, в нее введен сумматор, первый и второй входы которого соединены с выходами дифференциатора и второго интегратора соответственно, а выход - с входом определителя знака приращения.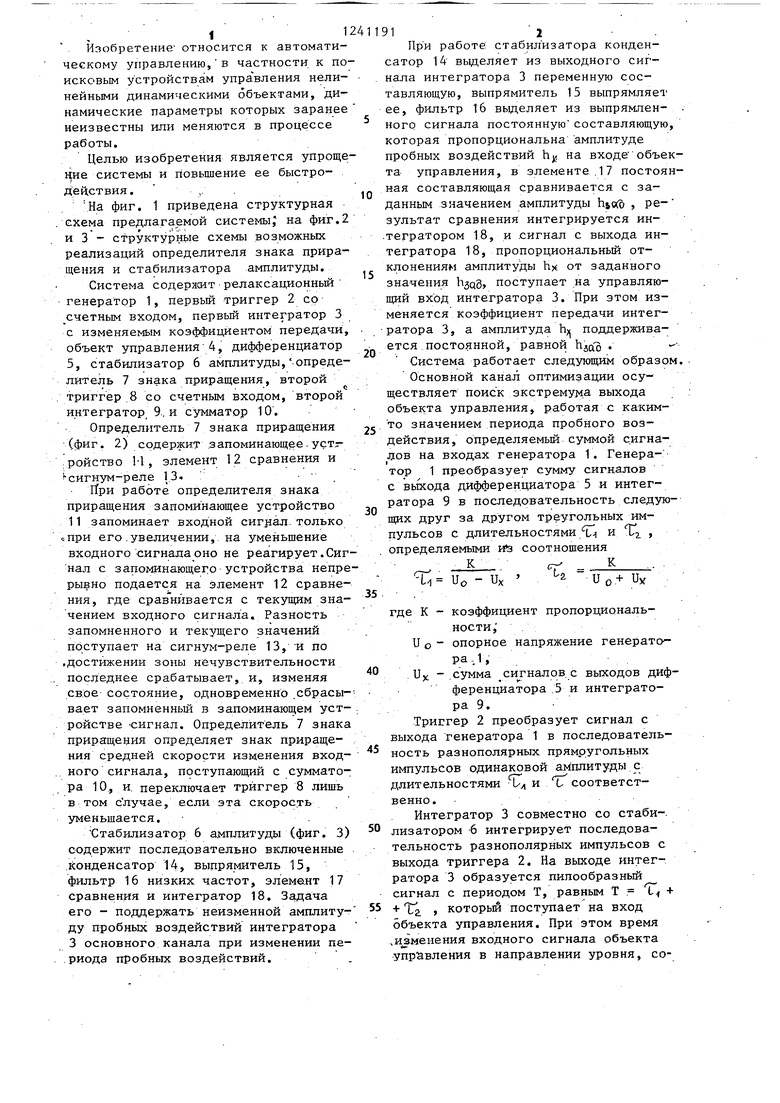
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поиска экстремума | 1983 |
|
SU1091119A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU746417A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Многоканальный автоматический оптимизатор | 1978 |
|
SU769490A1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
| Экстремальный регулятор | 1976 |
|
SU634233A1 |
| Способ поиска экстремума | 1978 |
|
SU744447A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
Изобретение относится к области автоматического управления, в частности к поисковым экстремальным устройствам управления нелинейными ди- . намическими.объектами. Цель изобретения - упрощение системы и повышение ее быстродействия. Поставленная цель достигается тем, что вместо сложного осредняющего фильтра в цепь управления релаксационнь1м генератором вво- ; дится сумматор. Принцип работы системы заключается в.том, что сигналы от генератора не подвергаются преобразованию в последовательность треугольных, а затем в последовател ь- ность прямоугольных импульсов с последующим усреднением. Это повьшает быстродействие. В системе имеются два контура: контур управления- объектом и контур упра1вления частотой работы релаксационного генератора, состоящий из сумматора, определителя знака, триггера и интегратора. 3 ил. с & (Л
От5л.7
HeSji.9
I
фуг. г
Редактор М.Бандура
Составитель П.Кудрявцев- Техред Л. Олейник Корректор М.Шароши
Заказ 3487/42Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое, предприятие, г. Ужгород, ул. Проектная, 4
| Гачинский Э.Е., Макаровский С.Н | |||
| Устройство для выпрямления многофазного тока | 1923 |
|
SU50A1 |
| - Приборы и системы управления, 1970, № 7, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
