1
Изобретение относится к машиностроению, а именно к устройствам программного управления оборудованием для обработки давлением.
Цель изобретения - повышение надежности работы системы управлени прессом и расширение технологических возможностей за счет достижения более высокой точности записи зон .действия команд, а также путем использования комакдоаппарата в составе микропроцессорной системы управления прессом.
На чертеже приведена фрикци онная схема бесконтактногоiконмандоаппара та.
Бесконтактный командоаппарат содержит генератор 1 опорной частоты, выход которого соединен со счетным ,входом двоичного счетчика 2, выходы которого, в свою очередь, соединены с адресными входами перепрограммируемого постоянного запоминающего устройства 3. Выходы последнего соединены с входами многоразрядного буферного регистра 4, формирующего сигналы команд управления. Выход генератора 1 подключен к входу формирвателя 5 трехфазного напряжения пит ния датчика 6 (например, сельсина). Выход датчика 6 подключен к формирователю 7 прямоугольных импульсов, вход которого соединен через квантов тель 8 с синхровходом регистра 4,
Вал сельсина(датчика 6)механичес ки связан с рабочим валом 9, привод мым в движение электроприводом 10.. Рабочим органом пресса является ползун 11, кинематически связанный с рбочим валом 9. Выход регистра 4 формирователя команд соединен с системой 12 управления прессом.
На счетный вход двоичного счетчика 2 поступают тактовые импульсы с выхода генератора 1. Частота импульсов, поступающих на вход счетчика в 360 раз выше частоты питания сельсина (датчика 6). В начале каждого периода опорной фазы питания датчика счетчик обнуляется, чем обеспечивается счет от О до 359. Выходы счетчка 2 соединены с адресными входами перепрограммируемого постоянного
запоминающего устройства 3. Зоны действия команд с дискретностью в , предварительно запрограммированы в перепрог раммируемом постоянном заo
5
20
поминающем устройстве 3. Сигналы зон команд .появляются на выходах этого устройства в каждом периоде питания сельсина - датчика 6 при переборе v адресов от О до 359. Сигнал, несущий информатдию об угловом положении рабочего вала, поступает с выхода сельсина - датчика 6 после формирователя 7 и квантователя 8 на синхро- вход регистра 4, где осуществляет опрос состояния зон команд. Состояние триггеров регистра 4 определяет команды в пределах каждого оборота датчика.
Бесконтактный командоаппарат работает следующим образом.
Электропривод 10 пресса приводит во вращение рабочий вал 9, вращательное движение которого преобразуется в возвратно-поступательное движение ползуна 11. За полный цикл хода ползуна 11 сельсин - датчик 6 делает один оборот. Фазовый сдвиг выходного напряжения сельсина относительно 25 одной из фаз питания, выбранной за опорную, соответствует углу поворота вала 9. Генератор 1 опорной частоты синхронизирует работу командоаппара- та. Формирователь 7 преобразует сину- соидапьное напряжение с выхода сельсина - датчика 6 в гф ямоугольные импульсы. Квантователь 8 преобразует фазовый сдвиг выходного сигнала формирователя 7 в дискретный фазовый сдвиг, благодаря чему устраняется неопределенность границ сфррмированных команд, поскольку сигналы, определяющие зоны действия команд, получаются путем записи в соответствующие ячейки устройства 3 логической 1,
30
40
45
Таким образом, обеспечивается подача в систему 12 управления пр.есса . необходимых команд по ходу ползуна с дискретностью, т.е. точностью в 1 угла поворота рабочего вала.
50
При использовании командоаппарата совместно с микропроцессорной системой управления многоразрядный буферный регистр позволяет производить опрос состояния команд в запоминающем устройстве.
Э4)фективность использования предлагаемого бесконтактного командоаппарата обусловливается повышением на- 55 дежности р аботы и расширением областей использования.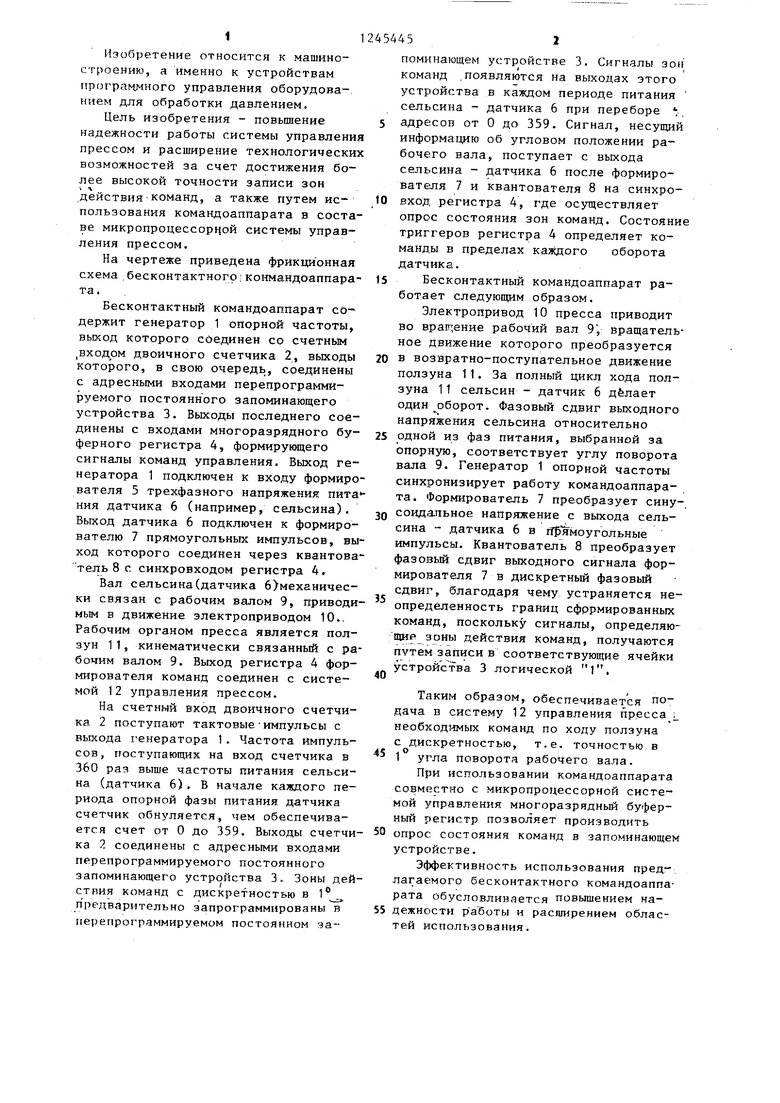
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления прессом | 1980 |
|
SU1055658A1 |
| Бесконтактный командоаппарат | 1978 |
|
SU774968A1 |
| Бесконтактный командоаппарат управления прессом | 1985 |
|
SU1260249A1 |
| Бесконтактный командоаппарат | 1978 |
|
SU810529A1 |
| Устройство для измерения глубины скважины | 1983 |
|
SU1099057A1 |
| Система управления размером петли, образуемой в рулонном материале приводным подающим органом обрабатывающей машины | 1981 |
|
SU1009579A1 |
| Преобразователь перемещения в код | 1981 |
|
SU960882A1 |
| Бесконтактный командоаппарат | 1979 |
|
SU826278A1 |
| Система автоматического управления строительно-дорожными и землеройно-транспортными машинами | 1991 |
|
SU1813144A3 |
| Устройство управления рабочим валом машины | 1981 |
|
SU1055556A1 |
Редактор А.Сабо
Составитель В.Стоколов
Техред О.Сопко Корректор С.Шекмар
3947/9
Тираж 597Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производсппенно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| Бесконтактный командоаппарат | 1978 |
|
SU774968A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
