1
Изобретение относится к машиностроению, в частности к устройствам управления оборудованием для обрабоки давлением.
Целью изобретения является повышение надежности работы пресса путем контроля исправности цепей питания сельсина-датчика.
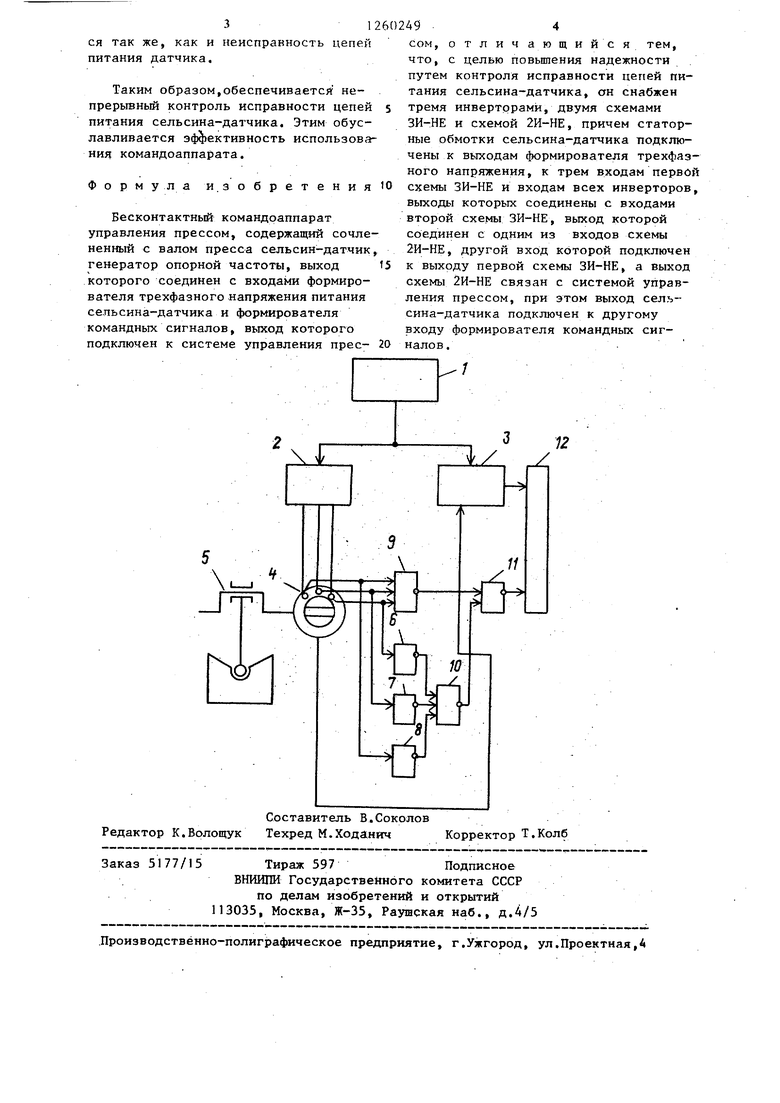
На чертеже представлена функциональная схема бесконтактного коман- доаппарата.
Бесконтактный командоаппарат содержит генератор I опорной частоты, выход которого соединен с формирователем 2 трехфазного напряжения и с формиройателем 3 командных сигналов выход формирователя 2 соединен со статорными обмотками сельсина-датчика 4, сочлененного с валом 5 пресса Выход сельсина-датчика 4 соединен с формирователем 3 командных сигналов Статорные обмотки сельсина-датчика соединены с входами инверторов 6 - 8 и входами первой схемы 9 ЗИ-НЕ. Выходы инверторов 6-8 соединены с входами второй схемь 10 ЗИ-НЕ. Выходы схем 9 и 10 соединены с входаО
ми схемы 11 2И-НЕ, выход формирователя 3 командных сигналов и выход схемы 11 соединены с системой 12 управления прессом.
, Бесконтактный командоаппа:рат ра бо.тает следующим образом.
Сельсин-датчик 4 включен по схеме фазовращателя, ротор его сочлене с валом 5 пресса. Фазовое положение выходного напряжения датчика 4 соответствует угловому положению его ротора и, следовательно, угловому положению вала 5 пресса. Сигнал свыхода датчика используется для формирования командных сигналов Зоны действия команд запрограммированы в формирователе 3, Эти сигналы используются для управления работой пресса. Синхронизация работы коман- доаппарата осуществляется генератором 1 опорной частоты. Питание сельсина-датчика 4 осуществляется трехфазным импульсным напряжением.
При выходе из строя хотя бы одного из усилителей питания датчика, при обрыве или замыкании на корпус одного из проводов питания сельсина датчика командные сигналы не формируются, либо появляются ложные сигналы, что может привести к поломке пресса и травмированию оператора.
60249:3
Для предотвращения этого осуществляется контроль исправности питания: сельсина-датчика формированием и вьщачей в систему 12 управления
5 сигнала аварии командоаппарата. Для этого статорные обмотки сельсина- датчика отдельными проводами соединены с входами первой схемы 9 ЗИ-НЕ и входами инверторов 6-8. При
О исправной системе питания сельсина- датчика на выходе схемы 9 удерживается 1, так как на входах схемы 9 в любой момент времени один из трех сигналов является нулевым,
5 Если произошел обрыв одного из питающих проводов, либо один из выходных усилителей формирователя 2 вышел из строя и на его выходе установилась 1, то на входе схемы 9
20 происходит совпадение трех сигналов 1, а на выходе схемы 9 появляется сигнал О. Этот сигнал, инвертированный схемой 1, поступает в систему 12 управления для аварийной оста новки работы пресса.
Если произошло замыкание на корпус хотя бы одного из проводов питания сельсина-датчика 4, либо усилитель питания датчика вьппел из
30 строя, так что на его выходе установился уровень О, то схема 9 не изменяет своего состояния. Для обнаружения такого родаiнеисправности полученные от статорных обмоток сель35 сина-датчика сигналы инвертируются инверторами 6 - 8 и поступают на входы схемы 10, на выходе которой как и на выходе схемы 9, удерживается уровень 1 при исправности цепей
40 питания датчика. При неисправности одной или более фаз питания датчика, приводящей к установлению на них уровня О , на выходе схемы 10 появляется сигнал О.
45
При исправных цепях питания сельсина-датчика на выходах схем 9 и 10 удерживаются сигналы 1, а на выходе схемы 1I 2И-НЕ постоянно удержи50 вается сигнал О. При нарушении
хотя бы одной из фаз питания датчика на выходе одной из схем 9,10 появляется сигнал О, а на выходе схемы II - сигнал 1, которьй воспринима55 ется системой 12 как сигнал аварии
командоаппарата. Обрыв или замыкание , проводников, идущих от статора датчика к схеме контроля, воспринимается так же, как и неисправность цепей питания датчика.
Таким образом,обеспечивается не- прерьшный контроль исправности цепей питания сельсина-датчика. Этим обуславливается эффективность использования командоаппарата.
Форм у л а и.з обретения
Бесконтактный командраппарат управления прессом, содержащий сочлененный с валом пресса сельсин-датчик генератор опорной частоты, выход которого соединен с входами формирователя трехфазного напряжения питания сельсина-датчика и формирователя командных сигналов, выход которого подключен к системе управления прес-
сом, отличающийся тем, что, с целью повышения надежности путем контроля исправности цепей питания сельсина-датчика, он снабжен тремя инверторами, двумя схемами ЗИ-НЕ и схемой 2И-НЕ, причем статор- ные обмотки сельсина-датчика подключены к выходам формирователя трехфазного напряжения, к трем входам перво схемы ЗИ-НЕ и входам всех инверторов выходы которых соединены с входами второй схемы ЗИ-НЕ, выход которой соединен с одним из входов схемы 2И-НЕ, другой вход которой подключен к выходу первой схемы ЗИ-НЕ, а выход схемы 2И-НЕ связан с системой управления прессом, при этом выход сельсина-датчика подключен к другому входу формирователя командных сигналов.
Составитель В.Соколов Редактор К.Волощук Техред М.Ходанич Корректор Т.Колб
5177/15
Тираж 597Подписное
ВНИИШ Государствейного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, наб., д.4/5
.Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный командоаппарат | 1978 |
|
SU810529A1 |
| Бесконтактный командоаппарат | 1978 |
|
SU774968A1 |
| Устройство управления прессом | 1988 |
|
SU1684090A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1146562A1 |
| Бесконтактный командоаппарат | 1984 |
|
SU1245445A1 |
| Измерительное устройство станка для балансировки коленчатых валов | 1986 |
|
SU1366893A1 |
| СЕЛЬСИНО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПОЛОЖЕНИЯ | 1992 |
|
RU2029642C1 |
| Устройство для управления технологической линией | 1986 |
|
SU1381426A1 |
| Устройство для управления автономным трехфазным двухмостовым инвертором тока | 1987 |
|
SU1561178A1 |
| Устройство для автоматического адресования объекта | 1991 |
|
SU1816729A1 |
Изобретение относится к области машиностроения, в частности, к устройствам управления кузнечно-прессо- вым оборудованием. Изобретение позволяет повысить надежность управления прессом путем непрерьгоного контроля исправности цепей питания датчика углового положения. Бесконтактный командоаппарат содержит сочлененный с валом пресса сельсин-датчик, гене- .ратор опорной частоты, формирователи напряжения питания и командных сигналов, а также схему для аварийной остановки работы пресса, вьтол- :Ненную на логических элементах. 1 ил.
| Авторское свидетельство СССР 774468, кл | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
