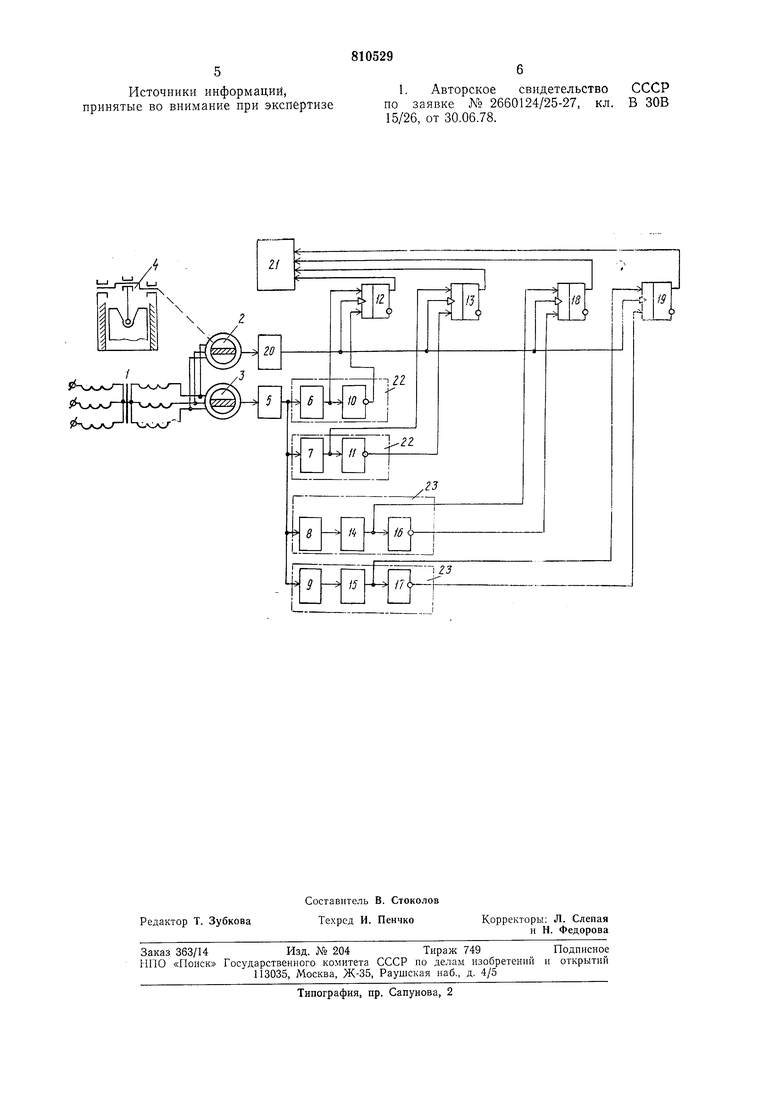
(54) БЕСКОНТАКТНЫЙ КОМАНДОАННАРАТ Сформированные команды с выходов командных триггеров 12, 13, 18, 19 поступают на логический блок управления 21, который формирует выходные команды включения различных механизмов пресса. Одновибраторы 6 и 7, включенные последовательно соответственно с инверторами 10 п 11, образуют двухэлементные ячейки 22. Последовательно соединенные одновпбраторы 8 (9) и 14 (15) вместе с инвертором 16 (17) образуют трехэлементные ячейки 23. Командоаппарат, изображенный на чертеже, реализует четыре команды, две из которых (ячейки 22) сформированы от пачала шага фазового датчика, а две другие (ячейки 23) - виутри шага. Бесконтактный командоаппарат работает следуюшим образом. Настройка датчика 2, сочлененного с эксцентриковым валом 4, и задатчика 3 осуш,ествляется таким образом, чтобы при положенпн ползуна пресса в верхней мертвой точке фазовый сдвиг между опорным напряжением и напряжением датчика равиялся нулю. При враш,ении эксцентрикового вала 4 цнклическп с частотой врашепия изменяется фазовый сдвиг от О до 360°, т. е. обеспечивается пропорциональность между электрическим углом и угловым поворотом вала в пределах его одного поворота. Но так как период частоты питания сельсина Т пропорционален фазовому сдвигу 360°, то длительность задающего импульса т, нропорционального заданному угловому положению ф вала, опре деляется из соотношения Формирование импульсов обеспечивают одповибраторы. При этом одновибраторы 6 и 7 формируют импульсы, пропорциональные командам с начала действия от верхней мертвой точки, одновибраторы 8 н 9 - импульсы, пропорциональные углу до начала команды, действующей внутри шага фазового датчика, одновибраторы 14 и 15 - импульсы, пропорциональиые команде внутри шага. Импульсы одмовибраторов 6, 7, 14, 15 через инверторы 10, 11, 16, 17 поступают на управляющие входы триггеров 12, 13, 18, 19 по счетным входам, которые запускаются от прямоугольных импульсов формирователя 20. Так как входные частоты триггеров одинаковы, но сдвинуты по фазе, то сигналы на входах триггеров опрокидывают те триггеры, которые по управляющему входу к моменту прихода сигнала открыты. При этом состояние этих триггеров будет иоддерживаться и циклически нодтверждаться с частотой иитания на всю длительность сформированного импульса. Количество комапд п их нахожденпе в пределах шага датчика определяют чпсло ячеек и командных триггеров. В систему управления прессы формируются команды останова пресса в верхней мертвой точке в режиме одиночных ходов, команды включения средств околопрессовой механизацни (например, валковой подачи), команды па зашиту при ходе ползуна вниз рук оператора при случайном их вводе в опасную зону (команды сопровождения рук) и др. В завнсимости от состояния командных триггеров 12, 13, 18, 19 реализуется в логическом блоке 21 заданный алгоритм. В процессе переналадки пресса во многих случаях требуется смеш,ение всех команд относительно первоначально выставленного положения. Задатчик, работаюпдий в режиме фазоврашателя, позволяет дистапционно смещать опорную фазу в пределах всего шага датчика, При пеобходимости можно обеспечить п автоматическую подстройку, если задатчик связать кинематически с рабочим органом. Кроме того, имеется возможность первоначальной дистанционной настройки датчика его командоаппарата с помощью задатчика путем смещения ротора относительно статора. Эффективность использования предлагаемого бесконтактного командоапнарата обусловливается повышением точностн его работы п улучшеппем условий эксплуатации и удобства переналадки. Формула изобретения 1.Бесконтактный командоаппарат, содержащий источник питания, сочлененный с рабочим валом фазовый датчик, выход которого через формирователь опорного напряжения соединен с командными триггерами, подключенными к блоку управления, а также соединенный с другим формирователем опорного напряжения задатчик, отличающийся тем, что, с целью повышения точности и улучшения условий эксплуатации, он снабжен комплектом двух- и трехэлементных ячеек, при этом каждая двухэлемеитная ячейка вынолнена в виде соединенных последовательно одновибратора и иивертора, а трехэлементная - в виде соединеппых последовательно двух одновибраторов и инвертора, причем входы всех упомянутых ячеек подключены к выходу формпрователя опорпого напряжения, соединенного своим входом с выходом задатчика, а выходы этих ячеек соединены с входами командных триггеров. 2.Бесконтактный командоаппарат по п. 1, отличающийся тем, что задатчик выполнен фазовым и его питающие обмоткп и питающие обмотки датчика подключены параллельпо источнику питания, который выполнен в виде трехфазного трансформатора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2660124/25-27, кл. В ЗОВ 15/26, от 30.06.78.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный командоаппарат | 1978 |
|
SU774968A1 |
| Бесконтактный командоаппарат | 1984 |
|
SU1245445A1 |
| Бесконтактный командоаппарат управления прессом | 1985 |
|
SU1260249A1 |
| Устройство для определения момента касания режущего инструмента с обрабатываемой деталью | 1983 |
|
SU1148769A1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2081503C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |
| Устройство для пуска вентильной машины постоянного тока | 1981 |
|
SU1003287A1 |
| Устройство для измерения фазового сдвига между током и напряжением автономного инвертора | 1981 |
|
SU1051666A1 |
| Устройство для позиционного управления | 1983 |
|
SU1104466A1 |
| Устройство управления весовым порционным дозатором | 1982 |
|
SU1035427A2 |
