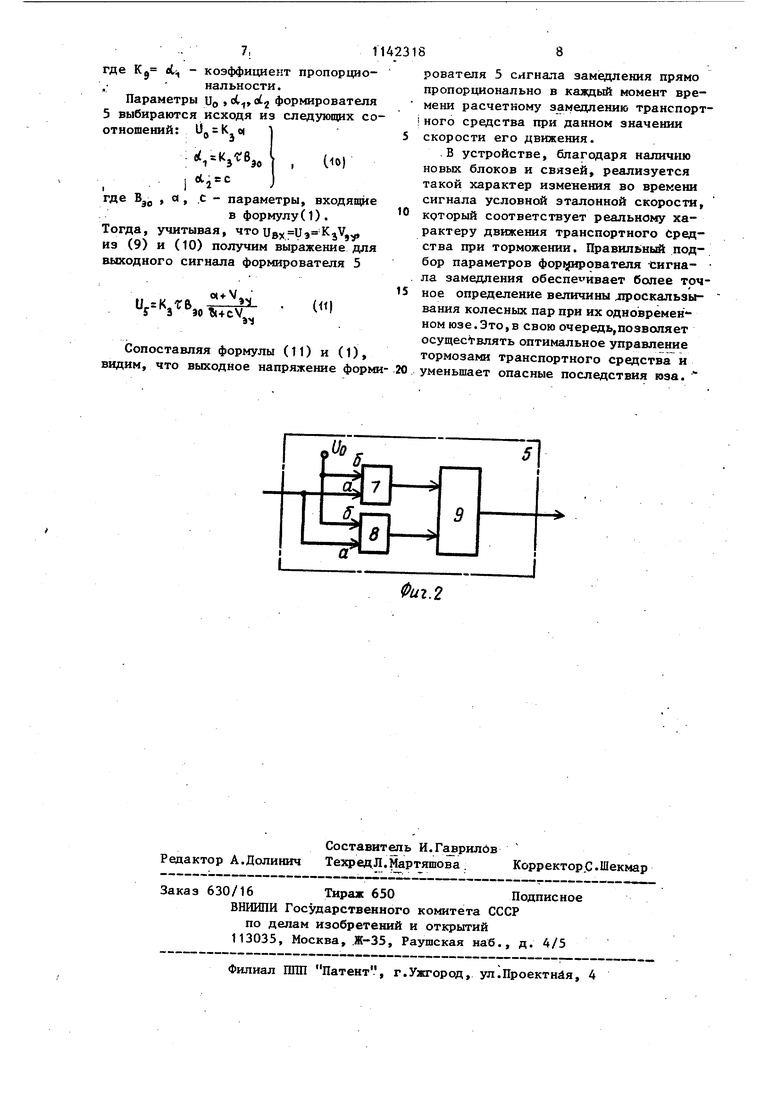
11 Изобретение относится к железнодорожному транспорту, а именно к системам противоюзной защиты подвиж ного состава, и может быть использо вано на всех железнодорожных транспортных средствах, оборудованных тормозами с электрическим управлением. Известно устройство для обнаружения юза колесных пар транспортного средства, содержащее датчики скорости вращения колесных пар, подключенные выходами к одним входам соответствующих блоков сравнения и одним входам блока выделения максимального сигнала, к другому входу которого подключен выход блока формирования сигнала условной эталонной скорости, причем выход блока вьвделения максимального сигнала связан с другими входами блоков сравнения 1J. При юзе одной или нескольких (но не всех одновременно) колесных пар блок вьщеления максимального сигнала формирует сигнал эталонной скорости V , равной скорости нескользя щей колесной пары, так как эта скорость является наибольшей. Дейст вие узла масштабного умножения, узлов срав нения позволяет устройству осуществля непрерывный контроль величины относ тельного скольжения колесных пар. При этом на одном из входов блока вьщеления максимального сигнала, соединенном с блоком формирования сигнала условной эталонной скорости имеется напряжение, модулирующее эташонную скорость Vj в некоторый предществующий момент времени. Это напряжение меньше, чем напряжение на выходе узла вьщеления максимального сигнала а fb раз, поэтому через узел вьщеления максимального сигнал это напряжение не передается. При одновременном юзе колесных пар резко уменьшаются величины всех напряжений, поступающих на входу блока вьщеления максимального сигна ла, кроме напряжения, поступающего с выхода блока формирования сигнала условной эталонной скорости. Это на пряжение становится, таким образом, максимальным из всех входных напряжений блока вьщеления максимального сигнала, и передается на его выход, моделируя условную эталонную скорость Vj. 82 Наиболее точное определение скольЬ жения колесных пар достигается в том случае, когда график изменения сигнала, моделирующего эталонную скорость Vj , соответствует изменению во времени скорости поступательного движения транспортного средства при торможении. Иначе говоря, производная во времени функции условной эталонной скорости должна быть возможно ближе по абсолютному значению и величине реального замедления Bjp транспортного средства при торможении. Величина указанного замедления Bjp зависит от скорости движения транспортного средства (т.е. от реальной эталонной скорости Vj ) по следующему закону (определяемому характеристиками трения колодок о колесо) °эр 30 w + cV эр где BJP - замедление транспортного средства при нулевой скорости движения (т.е. в момент остановки); а к с - постоянные коэффициенты, . определяемые характеристиками тормозной системы транспортного средства. Производная моделируемой эталонной скорости в известном устройстве и реальное эталонное замедление В-р совпадают только в одной точке и существенно различаются во всем остальном д шпазоне скоростей движе-. ния. Соответственно различается и характер изменения во времени условной эталонной скорости, моделируемой в устройстве, и реальной скорости движения транспортного средства, которую следует принимать за эталонную. Таким образом,- сигнал,- пропорциональный величине условной эталонной скорости и получаемый при одновременном юзе всех колесных пар, не соответствует характеру изменения во времени реальной эталонной скорости, что снижает точность определения скольжения колесных пар в широком диапазоне скоростей движения. Цель изобретения - повышение точности. Цель достигается тем, что устройство для обнаружения юза колесных пар транспортного средства, содержащее датчики скорости вращения колесных пар, подключенные выходами к од3ним входам соответствующих блоков сравнения и одним входам блока выде ления максимального сигнала, к друг му входу которого подключен выход блока формирования сигнала условной эталонной скорости, причем выход бл ка вьщеления максимального сигнала связан с другими входами блоков сра нения, снабжено формирователем сигн ла замедления транспортного средств и подключенным выходом ко входу бло ка формирования условной эталонной скорости сумматором, суммирующий и вычитаюпщй входы которого соединены соответственно с выходами формирова теля сигнала замедления транспортно го средства и блока выделения макси мального сигнала. Кроме того, формирователь замедл ния транспортного средства выполнен в виде функционального преобразователя, вход которого соединен с выхо дом блока вьщеления максимального сигнала, причем зависимость мелоду входным и вх и выходным ,и g,,,у напряжениями этого преобразователя выражается формулой ВШ IU,.C(,UBX где Vo - постоянное напряжение; d и oli - постоянные -коэффициенты. На фиг. 1 представлена структурная схема предлагаемого устройства для обнаружения юза колесных пар транспортного средства; на фиг. 2 функциональная схема формирователя сигнала замедления транспортного средства. Устройство для обнаружения юза содержит датчики 1 скоростей вращения колесных пар, блоки 2 сравнения блок 3 вьщеления максимального сигн ла, блок 4 формирования сигнала условной эталонной скорости, формирователь 5 сигнала замедления транспортного средства и сумматор 6. Выход каждого датчика 1 скорости вращения соединен со входом блока 2 сравнения. Вход У каждого блока сра нения соединен с выходом блока 3 вьоделения максимального сигнала, вход « которого соединен с выходом блока 4, а входы 5 и в с вьссодами датчиков 1 скоростей вращения колес ных пар. Вход блока 4 формирования условной эталонной скорости соедине с выходом сумматора 6, сум)4ирукиций 184 и вычитающий входы которого соединены соответственно-С выходом блока 3 вьщеления максимального сигнала и с выходом формирователя 5 сигнала замедления. Последний может быть выполнен в виде функционального преобразователя, который (фиг. 2) содержит сумматоры 7 и 8 и блок 9 деления, выход которого является выходом формирователя 5 сигнала замедления. При этом выходом формирователя 5 являются объединенные между собой входы 01 сумматоров 7 и 8. Входы б сумматоров 7 и 8 объединены и подключены к источнику постоянного напряжения UQ. Выходы сумматоров 7 и 8 соединены с входами соответственно делимого и делителя блока 9 деления. Устройство для обнаружения юза работает следующим образом. Датчики 1 вырабатывают электрические сигналы, определенный параметр которйх (например напряжение ) прямо пропорционален скорости V. вращения i-й колесной пары. При этом датчик 1 может быть выполнен в виде тахогенератора постоянного, тока, тахогенератора .переменного тока с вьшрямителем на выходе или в виде импульсного (частотного) датчика скорости, соединенного с преобразователем частоты в напряжение. Сигналы с выходов датчиков 1, а также с выхода блока 4 формирования условной эталонной скорости поступают на входы узла 3 вьщеления максимального сигнала. На выходе узла 3 формируется напряжение U j (являющееся эталонным напряжением Uj). Эталонное напряжение U поступает на вход Sкаждого из блоков 2 сравнения , на вход а которого поступает напряжение ц i-ro датчика 1. Блок 2 сравнения выполняет заданную операцию над входными напряжениями так, что его выходное напряжение и34 пропорционально тому параметру, который выбран в качестве основного при обнаружении юза. Например, выходное напряжение U2j может быть прямо про-, порционально величине абсолютного скольжения i-й колесной пары, определяемого выражением : , . Очевидно, что если скольжение отсутствует, что . и Vj.0. Если проскальзывают одна или несколько (но не все одновременно) S1 колесные пары, , где j номер не проскальзьшающей (эталонной) колесной пары, так как напряжение и, датчика этой колесной пары является наибольшим из всех входных напряжений узла .3, включая и напряжение и с выхода узла 4 задержки, При одновременном юзе всех колесных пар транспортного средства резко уменьшаются величины напряжений R всех датчиков 1. В этом случае, при отсутствии эталонной колесной пары, напряжение II моделирует условную эталонную скорость V-,.. При этом напряжение на выходе блока 3 равно напряжению U на выходе блока 4. Мгновен €ое значение напряжения . определяется следующей формулой W-Uk(t-y}, (3ti . где иь напряжение на выходе сумма тора 6; 1 - постоянная времени блока. В свою очередь U(((((iV}- }(i-), (41 гдец - напряжение на выходе форми рователя 5 сигнала замедл ния . Из вьгражений (3) и (4) получаем ) -yj т При достаточно малой величине за держки 1 выражение, стоящее в левой части формулы (4), можно считать ра ным производной эталонного напряжения и , по времени t. РТнтегрируя, будем иметь i U..(t)ofi + c , (б) где t - текущее значение времени, отсчитываемое от момента срьгоа сцепления последней колесной пары; С - постоянная интегрирования Значение постоянной С определим из начального условия: при Тогда формула (6) будет V,, V,o иметь вид V,e u,{tN-t . (7) Из формулы (6) следует, что при одновременном юзе всех колесных пар сигнал условной эталонной скорости V изменяется во времени в соотэет ствии с текущим значением напряжени 86 Uj формирователя 5 сигнала замедления, и, следовательно, выбирая соответствую цие параметры и схем формирователя 5, можно придать сигналу эталонной скорости любой вид. Пусть, например, и {(t)const y50 , т.е. формирователь 5 выполнен в виде источника постоянного напряжения. В этом случае согласно формуле (7) I V (t) V -6 t, CM эо KjT где в - расчетное замедление транспортного средства. Таким образом, при данном варианте выполнения формирователя 5 сигнал условной эталонной скорости будет изменяться с постоянным замедлением Вjy. Такой характер торможения свойственен транспортным средствам, оборудованным дисковыми тормозами. Наиболее точное приближение условной эталонной скорости к реальной может быть-достигнуто, если в качестве формирователя 5 сигнала замедления используется датчик линейного замедления (линейный акселерометр), жестко связанный с кузовом или тележкой .транспортного средства. В этом случае напряжениеUj(f) формирователя 5 будет прямо пропорционально ве-. личине реального замедления (t) транспортного средства. Если транспортное средство оборудовано тормозами колодочного типа, замедление при торможении функхщо-. нально связано со скоростью движе.ния приближенной формулой (1). Для такого транспортного средства формирователь 5 сигнала замедления может быть выполнен в виде функционального преобразователя, схема которого приведена на фиг. 2. На его вход, соединенный с выходом блока 3 вьщеления максимального сигнала, поступает напряжение моделирующее условную эталонную скорость V. Это напряжение поступает на входы а сумматоров 7 и 9, на входы 5 которых подается постоянное напряжение UQ Выходные напряжения и и Ug сумматоров поступают на делитель 9, выходное напряже1ше Ug -которого прямо пропорционально частному от деления его входных напряжений L- -К ,X где Ка «ti, - коэффициент пропорциональности. Параметры Uo Формирователя 5 выбираются исходя из следующих со a., отношений: rf,K,tfe,, , .С - параметры, входящие в формулу(1). Тогда, учитывая, что из (9) и (10) получим выражение для выходного сигнала формирователя 5 и -К гв . Сопоставляя формулы (11) и (1), видим, что выходное напряжение форм рователя 5 сигнала замедления прямо пропорционально в каждый момент времени расчетному замедлению транспортного средства при данном значении скорости его движения. .В устройстве, благодаря наличию новых блоков и связей, реализуется такой характер изменения во времени сигнала условной зталонной скорости, который соответствует реальному характеру движения транспортного Средства при торможении. Правильный подбор параметров фор рфователя -сигнала замедления обеспегивает более точное определение величины дфоскальзывания колесных пар при их одновременном юзе.Это,в свою очередь,позволяет осуществлять оптимальное управление тормозами транспортного средства и уменьшает опасные последствия юза. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обнаружения юза колесных пар подвижного состава | 1984 |
|
SU1245452A1 |
| Устройство обнаружения избыточного скольжения колесных пар подвижного состава | 1981 |
|
SU982939A1 |
| Устройство для автоматического регулирования колесного тормоза по условиям движения | 1987 |
|
SU1505811A1 |
| Измеритель скольжения колесной пары транспортного средства | 1987 |
|
SU1414673A1 |
| Устройство для автоматического управления колесными тормозами по условиям сцепления | 1982 |
|
SU1047755A1 |
| Устройство для выделения импульсной последовательности,имеющей экстремальную частоту | 1983 |
|
SU1233268A1 |
| Устройство контроля скольжения колесных пар транспортного средства | 1982 |
|
SU1022842A1 |
| Устройство для обнаружения скольжения колесных пар подвижного состава | 1982 |
|
SU1050925A1 |
| Устройство для защиты от юза колесных пар электроподвижного состава | 1986 |
|
SU1384433A1 |
| Устройство для защиты от боксования и юза колес транспортного средства | 1983 |
|
SU1139653A1 |
1. УСТР.ОЙСТБО ДЛЯ ОБНАРУЖЕНИЯ ЮЗА КОЛЕСНЫХ ПАР ТРАНСПОРТНОГО СРЕДСТВА, содержащее датчики скорости вращения колесных пар, подключенные выходами к одним входам соответствующих блоков сравнения и одним входам блока вьщеления максимального сигнала, к другому входу которого подключен выход блока формирования сигнала условной эталонной скорости, причем выход блока вьщеления максимального сигнала связан с другими входами блоков сравнения, отличающееся тем, что, с целью повышения точности, оно снабжено формирователем сигнала замедления транспортного средства и подключенным выходом ко входу блока формирования условной эталонной скорости сумматором, вычитаю1Щ1й и суммируклций входы которого соединены соответственно с выходами формирователя сигнала замедления транспортного средства и блока вцделения максимального сигнала. 2. Устройство поп, 1, отличающееся тем, что формирователь сигнала замедления транспортного средства вьшолнен в виде функционального преобразователя, вход которого соединен с выходом блока вьщеления максимального сигнала, причем зависимость мелду входным Vg, и вы(Л ходнь Vg, напряжениями этоШо преовразователя выражается формулой V V о ах w i - i-vrT . вых где VP - постоянное напряжение,ol и olj постоянные коэффициенты.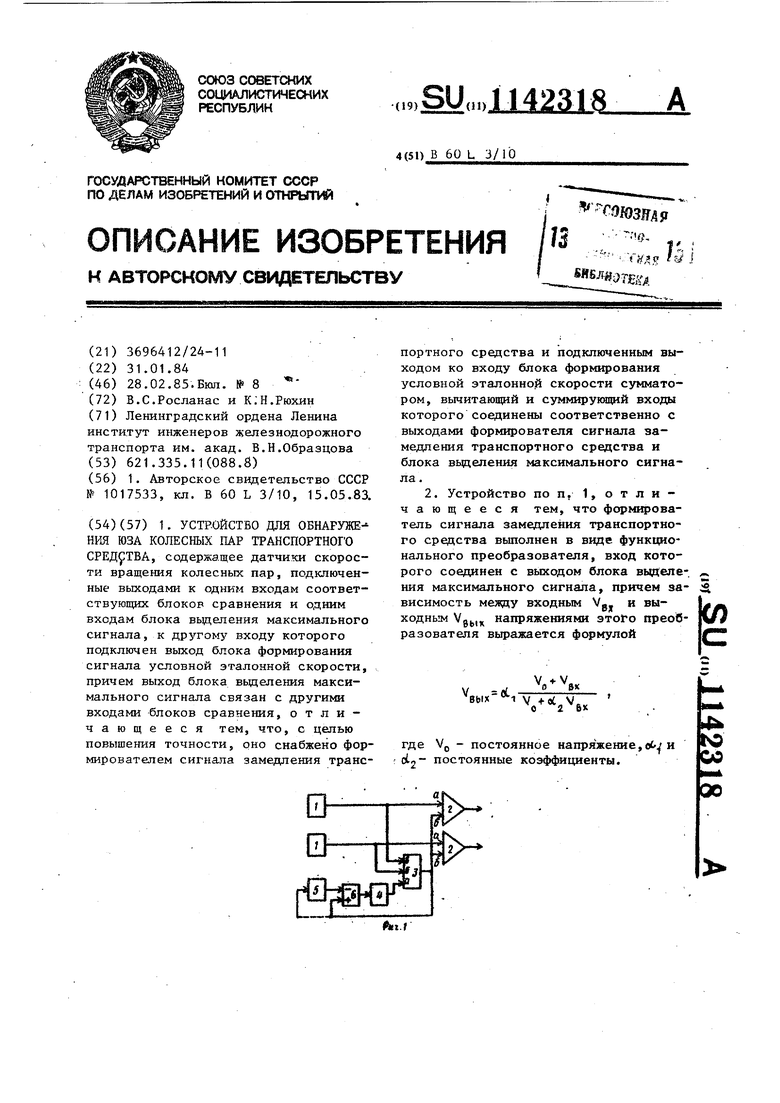
0иг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство обнаружения скольжения колес транспортного средства | 1981 |
|
SU1017533A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
