В отличие от известных устройств для коррекции систем автоматического регулироваиия и управления предлагаемый корректор обеспечивает повышение качества переходных процессов и стабилизацию систем.
Описываемый нелинейный корректор построен из ряда нелинейных корректирующих ячеек. Каждая ячейка содержит сумматор, релейный элемент и два вентиля и служит для выработки нелинейной функции координаты и ее производной. Такое выполнение корректирующих ячеек дает возможность осуществлять скачкообразное изменение структуры и параметров системы в зависимости от нескольких переменных, например координаты и ее производной, связанных между собой линейной зависимостью.
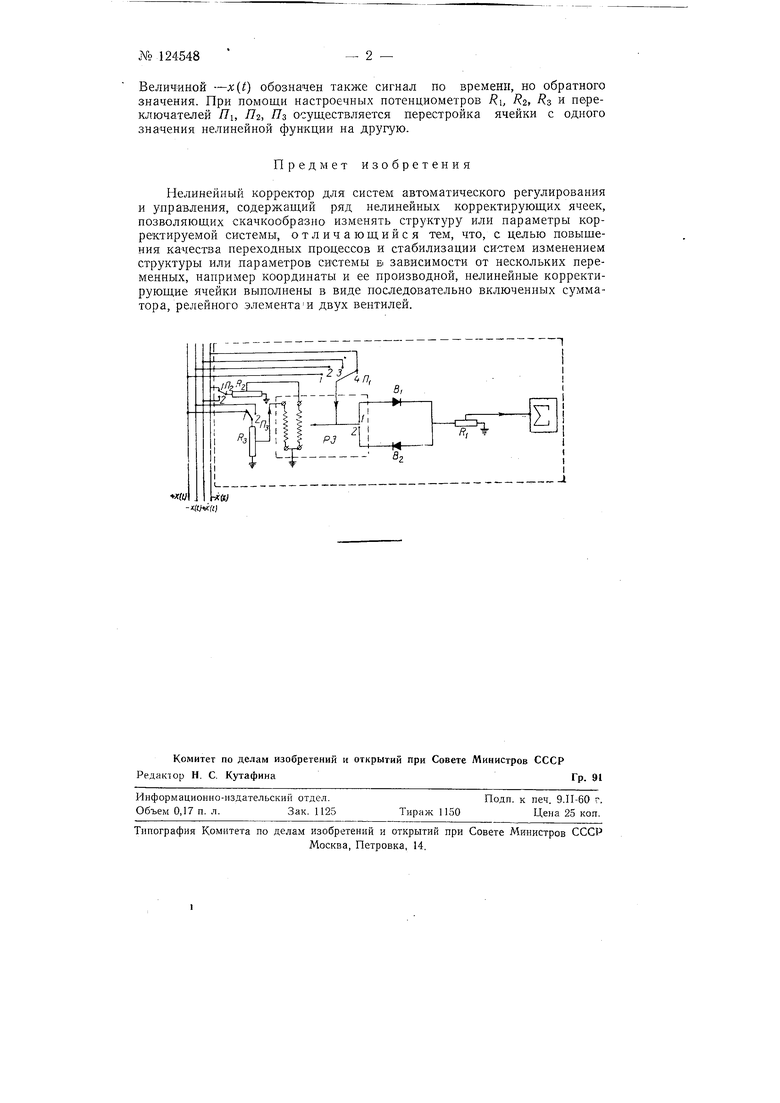
Схема корректирующей ячейки изображена на чертеже. Она состоит из сумматора 2, двух вентилей BI и BZ, релейного элемента РЭ, настроечных потенциометров Ri, R, и настроечных переключателей Я, Яз и Яз. В качестве сумматора могут быть использованы любые стандартные сумматоры, например усилители постоянного тока с обратной связью, магнитные усилители и т. п. Вентилями могут служить любые диоды, например 6х2П, или полупроводниковые элементы типа ДГЦ-24 и т. п. Релейным элементом может служить обыкновенное поляризованное реле типа РП-4 или РП-5, магнитный усилитель, работающий в релейном режиме, триггерные схемы и т. д. При использовании Б качестве релейного элемента реле РП-4 или РП-5 отпадает необходимость в сумматоре, так как суммирование производится на соответствующих обмотках реле, и, таким образом, оно является одновременно и сумматором и релейным элементом. При применении в качестве вентилей элементов тила ДГЦ-24 ячейка не требует источников, питания.
Величиной +x(t) обозначен знакоЛеременный сигнал по времени, пропорциональный ошибке или отклонению регулируемой координаты.
Величиной -x(t) обозначен также сигнал по времени, но обратного значения. При помощи настроечных потенциометров Ri, 2, з и переключателей Яь Я2, Яз осуществляется перестройка ячейки с одного значения нелинейной функции на другую.
Предмет изобретения
Нелинейный корректор для систем автоматического регулирования и управления, содержащий ряд нелинейных корректирующих ячеек, позволяющих скачкообразно изменять стрзктуру или параметры корректируемой системы, отличающийся тем, что, с целью повыщения качества переходных процессов и стабилизации систем изменением структуры или параметров системы EI зависимости от нескольких переменных, например координаты и ее производной, нелинейные корректирующие ячейки выполнены в виде последовательно включенных сумматора, релейного элементаи двух вентилей.
brej
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ | 1969 |
|
SU254214A1 |
| Регулятор качества переходных процессов в системах автоматического регулирования | 1960 |
|
SU142080A1 |
| Следящая система | 1980 |
|
SU941925A1 |
| Устройство для управления периодической подачей | 1959 |
|
SU126714A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Регулирующее устройство | 1959 |
|
SU130350A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| Нелинейный функциональный преобразователь | 1953 |
|
SU118053A2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОВЕТРИВАНИЕМШАХТ | 1970 |
|
SU260976A1 |
| Нелинейное корректирующее устройство для систем автоматического управления | 1978 |
|
SU752219A1 |
