(54) НЕЛИНЕЙНОЕ КОРРЕКТИРУЮР1ЕЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Изобретение относится к автоматике и может быть использовано для коррекции в измерительных и исполнительных устройствах систем автоматического управления, а именно автоном ных систем управления (АСУ) с переменной структурой. В состав АСУ ПОДВИЖНЕЛМ объектом входят управляющее устройство (УУ), исполнительное устройство (ИУ), объект управления (ОУ), чувствительное устройство (ЧУ).Непосредственно, с СУ, имекицим входные и выходные коо динаты в виде механических величин (угол, скорость, путь, ускорение, сила, и т.д.) и УУ взаимодействуют два звена регулятора: ИУ - на входе ОУ и ЧУ - на выходе ОУ. Эти устройства, как правило, содержат электромеханические элементы, воздейст вующие на ОУ (например, привод руля, заслонки, сопла двигателей и т.д.) или вырабатывающие информаци о его движении (например, датчики, ускорения и скорости, маятник, центробежный регулятор, двухстепенный гироскоп и т.д.), Уравнения движений ИУ и ЧУ иден(тичны и имеют вид kx + сх + f F(XI), где F(x|) - координаты управления, . f - сила трения, cxj - позиционное сопротивление;скоростное демпфирование, инерционное сопротивление . Однако в некоторых ., случаях, когда основной является инерционная составляющая сил сопротивления тх2,а величины fj, и F(x|) ограничены, возникают известные трудности демпфирования собственного колебательного движения, возникающего в системе вследствие сравнительно малого сопротивления kxg. Когда позиционная сила cXj, образуется в системе посредством обратной связи, контур которой содержит запаздывание или нелинейность, в системе возможен процесс незатухающих колебаний тх + с.. (xt) С точки зрения влияния движений ИУ и ЧУ на работу системы управления следует отметить, что собственное движение ИУ приводит к ложному движению ОУ, собственное движение ЧУ при1ВОДИТ к ложному сигналу, поступающему в регулятор.
Поэтому задача предотвращения собственных движений ЧУ и ИУ является одной из проблем построения помехозащищенности системы управления с заданной динамической точностью.
Эти обстоятельства приводят к необходимости введения в систему демпфирующих сил (сигналов). | Для обеспечения требуемого качества процесса регулирования ЧУ и ИУ применяют корректирующиеустройства. Часто кроме требований по запасу устойчивости к ЧУ, ИУ к автоматическим системам могут предъявляться жесткие требования и по другим показателям качества: установившейся точности быстродействию, величине перерегулирования, колебательности. Указанные, показатели качества в автоматической системе зачастую лучше могут .обеспечиваться только при нелинейном протекании процесса регулирования.
Для демпфирования собственных движений ЧУ и ИУ используются корректирующие устройства, принцип действия которых основан на изменении структуры системы в зависимости от знаковых соотношений координаты ошибки . и ее первой производной .
Известны устройства для коррекции систем автоматического управления, содержащие форсирующее звено первого порядка, собранное на пассивных элементах R, С. В этих устройствах для повышения быстродействия системы без. изменения ее коэффициента усиления содержится релейная схема упра вления, позволяющая подключать () и отключать (прие-е 0) дифференцирующую емкость форсирующего звена, что равносильно введению в систему линейной скоростной связи kxg 1}
Однако скоростное демпфирование приводит к амплитудно-фазовым искажениям воспринимаемой информации в рабочей полосе частот, к сужению рабочей полости частот, увеличению статической погрешности ЧУ и ИУ. Статическую погрешность можно уменьшить за счет увеличения коэффициента передачи системы.
Известно также нелинейное корректирующее устройство, содержащее логический переключающий блок с двумя ключевыми схемами. Повышение быстродействия достигается путем изменения коэффициента передачи системы (|2.
Недостатком данного устройства является возможность его применения только для узкого класса АСУ, а введение большого количества ключей, логических схем усложняет настройку корректора. .
Наиболее близко к предлагаемому нелинейное корректирующее устройство для систем автоматического управлени содержащее усилитель,выход которого соединен с первыг входом сумматора, вход - через дифференциатор со вxoдo
релейного элементаpiB этом устройств для повышения быстродействия системы параллельно сигналу ошибки G вводится дополнительная функция управления вида .
о V - и sjgn е
Это устройство расширяет возможности управления, так как управляющей воздействие прикладываются тогда, когда выполняются условия
О
. V о
и
Недостатком устройства является зона застоя, определяемая величиной управления pJ , +Uj,
Таким образом, выигрывая в динамической точности систем управления, т.е. повышений быстродействия-уменьшении перерегулирования и колебательности, проигрывают в статической точности.
Цель изобретения - повышение статической точности и помехозс1щищеНности систем автоматического управления.
Поставленная цель достигается тем, что корректирующее устройство содержит импульсный элемент, вход которого подключен к выходу релейного элемента, а выход - ко второму входу сумматора, а также тем, что импульсный элемент содержит генератор импульса и ключ, вход и выход которого связаны соответственно со входом и выходом импульсного элемента, а управляющий вход - с выходом генератора импульсов.
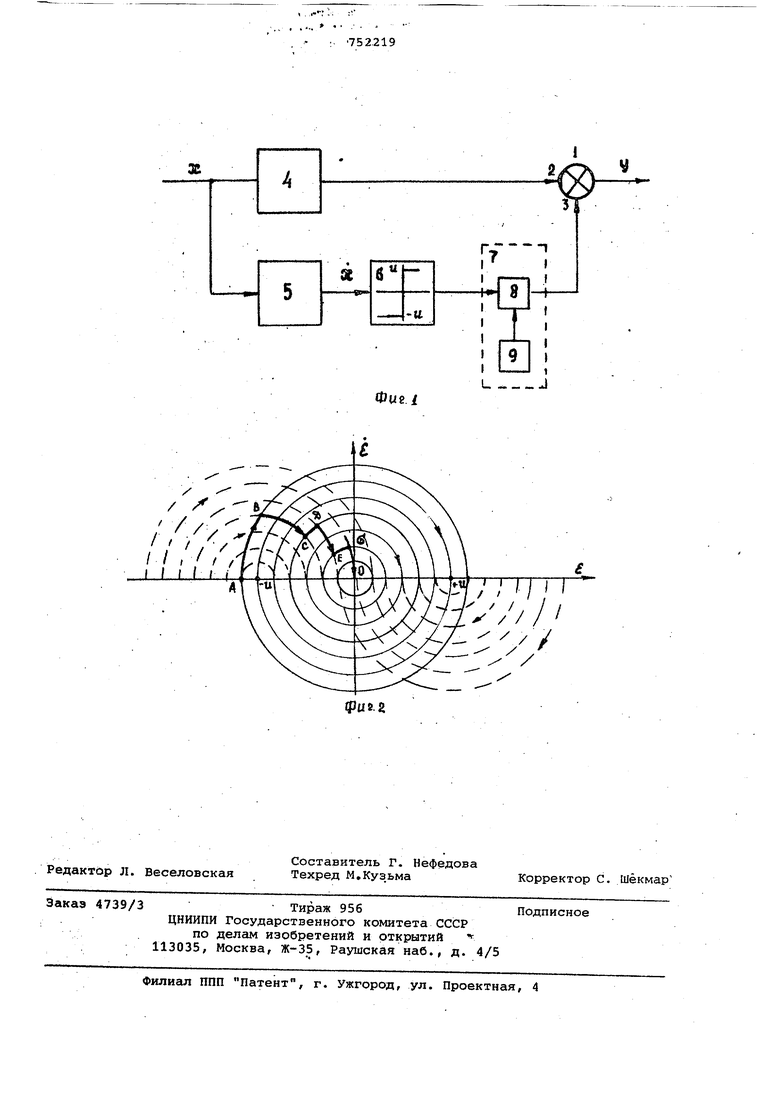
На фиг. 1 изображена функциональная схема нелинейного корректирующего устройства для систем автоматического управления, на фиг. 2 - фазовый портрет системы.
Функциональная схема нелинейного корректирующего устройства для систем автоматического управления содержит сумматор 1, ко входам 2, 3 которого подключены две параллельные цепи, в одну из которых включен усилитель 4, а другую дифференциатор 5, двухпозиционный релейный элемент б, импульсный элемент 7, состоящий из ключа 8 и генератора 9 импульсов, управляющий вход ключа 8 соединен с выходом генератора импульсов 9.
Нелинейное корректирующее устройство работает следующим образом.
Если на входе устройства сигнал , то на выходе корректирующего устройства получают сигнал вида у U(S,T). В том случае, если )j,.tO, ,то на выходе устройства получают
Т)
схй - и (
Наличие- дополнительного релейного сигнала вида Ф U signxg идентично введению сухого трения, которое в колебательной системе не приводит к уменьшению собственной частоты системы, вместе с тем, постоянное воздействие таким сигналом существен но влияет на статическую точность системы, образуя зону застоя. Очевидно, что если дополнительный сигнал в системе присутствует период чески, фазовый портрет на плоскости координат ошибки И. и ее первой произ водной и представляет собой последо вательное соединение отрезков фазовы траекторий рассматриваемой системы без трения (фиг. 2, участки AB,CD, EG) и с трением (участки ВС, DE, G При этом все фазовые траектории стягиваются к особой точке с координатами О, т.е. в начало координат что свидетельствует об отсутствии зоны застоя. . Если частота торможения системы сухого трения постоянна, то дополнительный сигнал воздействует на (Систему лишь в течение некоторой ча ти t периода торможения Т. Это эк валентно введению в цепь воздействи импульсного элемента 7, состоящего из ключа 8, управляющий вход которо го соединен с выходом генератора им пульсов 9. Таким образом, свободное движени ЧУ и ИУ с периодическим торможением может быть описано дифференциальным импульсным уравнением m-Xj+cXg и sign х ( (f, Т) Импульс системы торможения равен S ИТ в данном случае величина постоянная. Разбивая уравнение на два линейных дифференциальных импульсных уравнения mxg -ь сх и (Т, Т) при Xj -i- О, mxli tcxg -ич(Т,Т) при xg П . и учитывая начальное условие, можно .найти решение X2(t) в виде дискретного решения х(Т, Т), зависящего от импульса силы S. При правильном выборе параметров периодического торможения можно избежать внесения в передаваемую устройством информацию амплитудно-фазо вых искажений. Параметрами импульсного торможеНИН являются частота торможения (j3J (или период торможенияТ- ) .и длительность торможения С . Согласно теореме Котельникова искажений передаваемой информации не будет, если GJ 2сОо и О, где о - собственная частота системы (под этим подразумевается, что спектр входного сигнала системы не превышает частоты MO ) Таким образом, импульс силы трения должен иметь значительную амплитуду (+U, -и) и бесконечно малую длительность, а частота повторения импульсов должна быть выше двойной частоты системы. Введение импульсов сухого трения позволяет существенно сократить время переходного процесса и практически устранить собственное движение системы без ухудшения статических и динамических свойств ЧУ и ИУ автономных систем управления при простоте схемной реализации. Формула изобретения 1.Нелинейное корректирующее устройство для систем автоматического управления, содержащее усилитель, выход которого соединен с первым входом сумматора, а вход - через дифференциатор со входом релейного элемента, отличающееся тем, что, с целью повышения статической точности и помехозащищенности систем автоматического управления, оно содержит импульсный элемент, вход которого подключен к выходу релейного элемента, а выход - ко второму входу сумматора. 2.Устройство по п.1, отличающее с я тем, что импульсный элемент содержит генератор импульсов и ключ, вход и выход которого связаны соответственно со входом и выходом импульсного элемента, а управляющий вход - с выходом генератора импульсов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 362279, кл. G 05 В 5/01 , 01.06,71. 2.Авторское свидетельство СССР № 230930, кл. G05 В 5/01, 17.04.67, 3.Авторскоесвидетельство СССР 296079, кл. G05 В 5/01, 05.01.70 (прототип).
L -.«J
Фцъ I


| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Устройство нелинейной коррекции | 1981 |
|
SU1012192A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1394386A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |