Изобретение относится к грузоподъемным механизмам, а именно к поли- спастны системам, и является усовершенствованием известной подъемно- тяговой системы по авт.св. № 787347.
Цель изобретения - повышение надежности работы путем синхронизации работы полиспастов и обеспечение подъема в заданном положении.
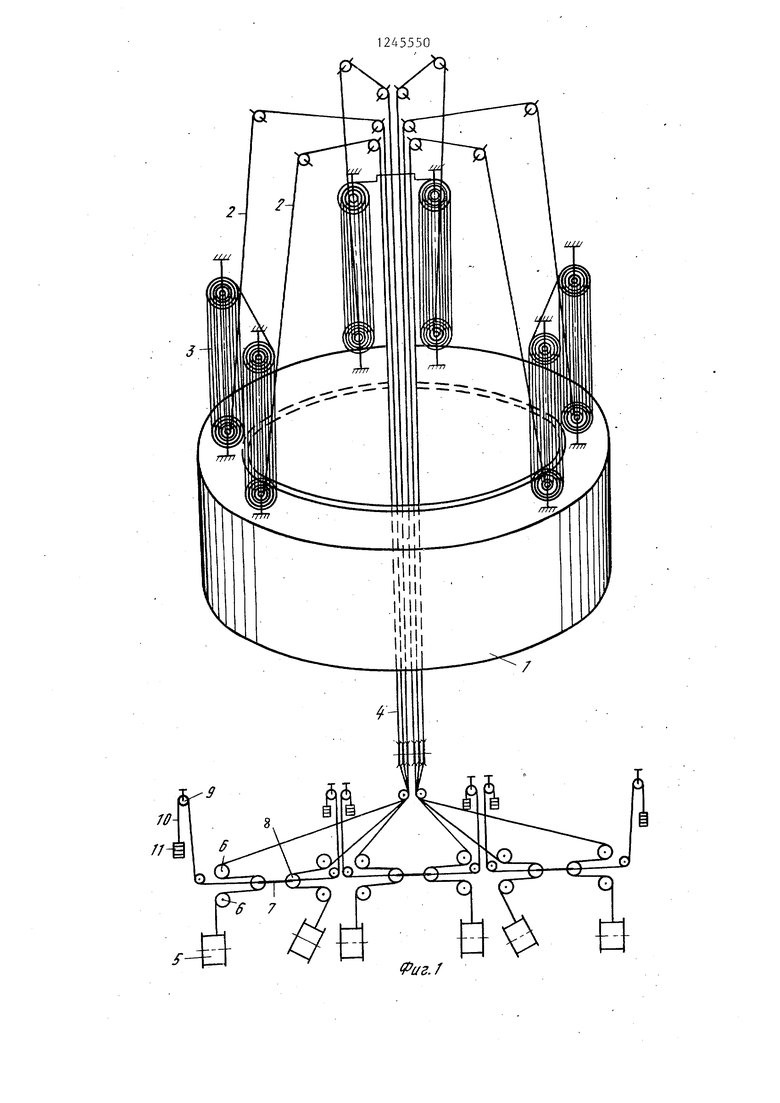
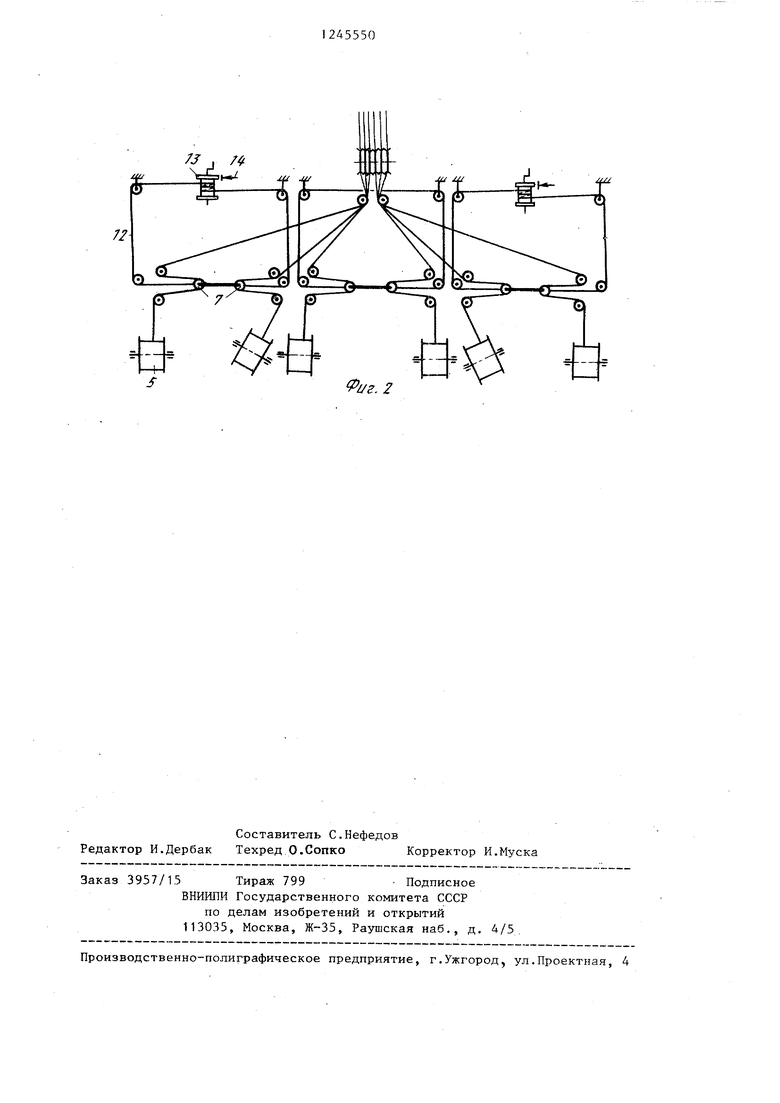
На фиг.1 изображена подъемно-тяговая система, общий вид; на фиг.2 - то же, вариант исполнения.
Подъемно-тяговая система для подъема груза содержит попарно соединенные друг с другом грузовыми канатами 2 многониточные полиспасты 3, сбегаю- нити 4 которых связаны с грузоподъемными механизмами 5 через объединенные в группы отводные ролики 6, причем сбегаюш ие нити каждой пары полиспастов соединены с грузоподъем- .ными механизмами и через отводные ролики разных групп, а сбегающие нити разных пар полиспастов попарно соединены с роликами одной группы. Два ролика каждой группы, огибаемые сбегающими нитями разных полиспастов, выполнены подвижными и связанными между собой тягой 7. Каждая пара подвижных отводных роликов 8 соединена посредством каната блочных систем, включающих канаты 9, запасованные через дополнительные отводные блоки 10, с тарированными грузами 11.
10
тей 4, отведенных к грузоподъемным механизмам 5.
При превышении усилия в одной и сбегающих нитей 4 относительно дру гих равнодействующая усилия от это нити на один из двух подвижных рол ков 8 каждой пары, соединенных тяг 7 роликов, обуславливает перемещение до вьфавнивания усилий в обеих сбегаю щих нитях полиспастов. Если поднимае конструкция 1 вследствие отклонени центра тяжести от геометрической о и вытяжки канатов приобретает пере кос в вертикальной плоскости, то к
15 соответствующей трособлочной систе присоединенной к подвижным роликам закрепляется тарированный (мерный) груз 11, вес которого определяется расчетным путем (разностью нагрузк
20 на полиспастах и требуемым положен поднимаемой, конструкции). Так, нап мер, если усилие в одной сбегающей нити больше, чем в другой на 200 к при этом необходимо закрепить груз
25 массой 400 кг.
В процессе подъема груза при эт происходит вьфавнивание усилия в сбегающих нитях всех полиспастов .
30 При необходимости подъема груза заданном его положении можно производить корректировку его положения до начала подъема посредством вращения барабанов 13, на которые запа
Система может быть снабжена соеди- ,5 сованы нити замкнутой ветви каната
12, концы которого соединены с каждой парой подвижных роликов 8. Посл придания грузу необходимого положе ния барабаны фиксируют посредством нормально замкнутых тормозов или ф саторов любого типа и производят подъем конструкции, перемещающейся параллельно себе самой. При этом перекос конструкции и ее заклинива Исключается.
ненными концами с каждой парой подвижных роликов канатом 12, образующим замкнутую ветвь, запасованную (через барабан 13, снабженный фикса- тором 14 его положения.
Система работает след ующим образом.
При подъеме груза 1 происходит натяжение канатов 2 многониточньпс полиспастов , в том числе и сбегающих ни
тей 4, отведенных к грузоподъемным механизмам 5.
При превышении усилия в одной из сбегающих нитей 4 относительно других равнодействующая усилия от этой нити на один из двух подвижных роликов 8 каждой пары, соединенных тягами 7 роликов, обуславливает перемещение их до вьфавнивания усилий в обеих сбегающих нитях полиспастов. Если поднимаемая конструкция 1 вследствие отклонения центра тяжести от геометрической оси и вытяжки канатов приобретает перекос в вертикальной плоскости, то к
соответствующей трособлочной системе, присоединенной к подвижным роликам 8, закрепляется тарированный (мерный) груз 11, вес которого определяется расчетным путем (разностью нагрузки
на полиспастах и требуемым положением поднимаемой, конструкции). Так, например, если усилие в одной сбегающей нити больше, чем в другой на 200 кг, при этом необходимо закрепить груз
массой 400 кг.
В процессе подъема груза при этом происходит вьфавнивание усилия в сбегающих нитях всех полиспастов .
При необходимости подъема груза в заданном его положении можно производить корректировку его положения до начала подъема посредством вращения барабанов 13, на которые запасованы нити замкнутой ветви каната
12, концы которого соединены с каждой парой подвижных роликов 8. После придания грузу необходимого положения барабаны фиксируют посредством нормально замкнутых тормозов или фиксаторов любого типа и производят подъем конструкции, перемещающейся параллельно себе самой. При этом перекос конструкции и ее заклинивание Исключается.
fpuz.f
1/г.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания такелажной оснастки | 1987 |
|
SU1518279A1 |
| Грузоподъемное устройство | 1984 |
|
SU1296503A1 |
| Грузоподъемное устройство | 1973 |
|
SU527371A1 |
| Стенд для испытания грузоподъемных механизмов | 1976 |
|
SU583381A1 |
| Подъемно-тяговая система | 1979 |
|
SU787347A1 |
| Грузоподъемное устройство | 1973 |
|
SU531786A1 |
| Канатно-роликовый стенд | 1989 |
|
SU1719305A1 |
| Якорь для подъема вертикальных аппаратов | 1988 |
|
SU1636561A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗА (ВАРИАНТЫ) | 2001 |
|
RU2195424C2 |
| Подъемно-тяговая система | 1983 |
|
SU1229173A1 |
| Подъемно-тяговая система | 1979 |
|
SU787347A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
