Изобретение относится к подъемно-транспортному машиностроению, а именно к ленточным конвейерам, транспортирующим грузы на большие расстояния.
Целью изобретения является повышение надежности в работе конвейера путем снижения нагрузок на ленту при ее перевороте.
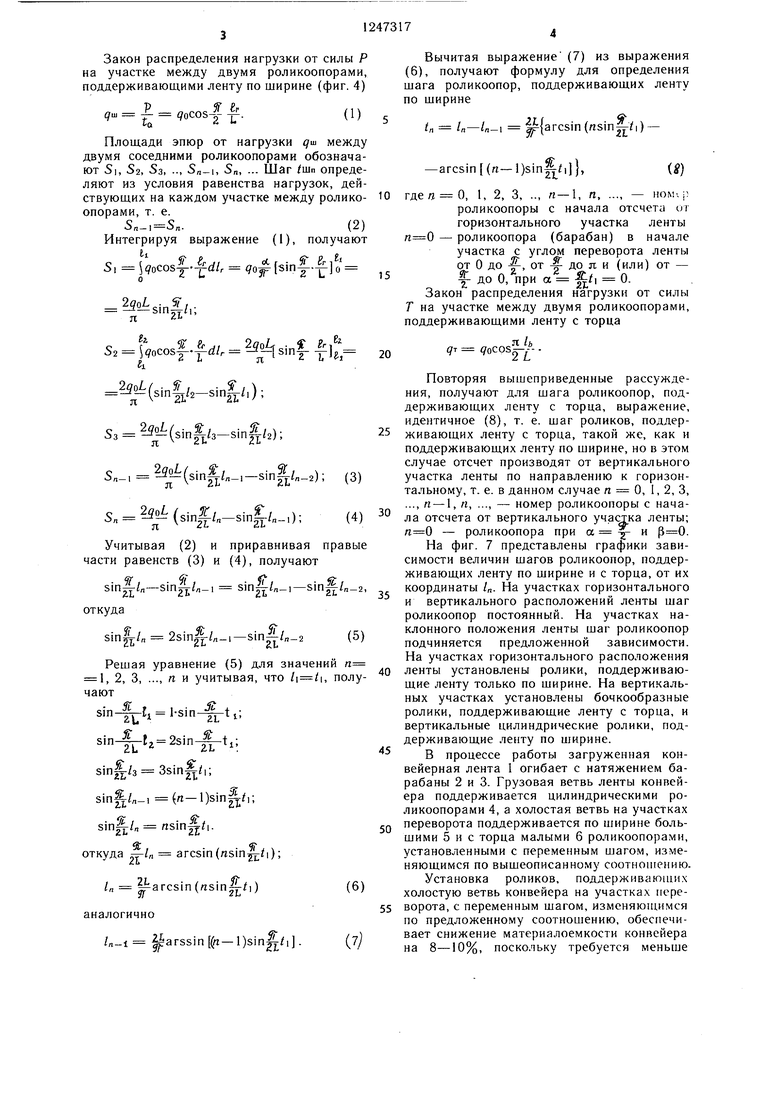
На фиг. 1 изображен ленточный конвейер, обш,ий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - эпюра нагрузок на холостую ветвь конвейера от составляюш,ей Р веса Q ленты, нормальной к рабочей плоскости ленты; на фиг. 5 - эпюра нагрузок от составляюш,ей 7 веса Q ленты, тангенциальной к рабочей плоскости ленты (нормальной к торцовой плоскости); на фиг. 6 - графики зависимостей величин шагов роликоопор, поддерживающих ленту по ширине и с торца, от их координаты /„ (номера опоры п} на фиг. 7 - графики зависи)мостей величин щагов роликоопор от их координаты для ленточного конвейера, имеющего наряду с участками перегиба холостой ветви ее горизонтальные и вертикальные участки.
Ленточный конвейер содержит гибкий рабочий орган в виде ленты 1, установленной с натяжением на барабанах 2 и 3, ролико- опоры 4, поддерживающие грузовую ветвь ленты конвейера, холостую ветвь ленты 1 поддерживают роликоопоры 5, расположенные по ширине, и роликоопоры 6, поддерживающие ленту с торца, холостая ветвь ленты имеет участок с углом переворота вокруг продольной оси ленты от О до - и участок с углом переворота ленты от - до я или
от у до 0. На вертикальном участке ленты
установлены два больщих ролика 7 и один малый 8 бочкообразной формы для лучшего центрирования ленты. Роликоопоры 5 и 6 могут быть выполнены с винтовой нарезкой для предотвращения сползания ленты по роликам.
Участки переворота ленты выполнены с возможно большей их длиной (насколько позволяет общая длина конвейера) с целью уменьшения напряжений кручения в ленте.
Ролики 5, поддерживающие ленту по ширине, установлены с переменным щагом, увеличивающимся от горизонтального положения ленты до вертикального, а ролики 6, поддерживающие ленту с торца, установлены с переменным шагом, увеличивающимся от вертикального положения ленты до горизонтального, причем величины /„ этих шагов определяют в зависимости от координаты /л (номера опоры п) по следующему соотно- члопию
/п /я-//, {arcsin(fisin fi) -
2L
-arcsin (n-l).
2L
где tn - шаг между (п-1)-й и л-й роликоопорами, м;
/г О, 1, 2, 3, ..., (п-1), п, ... - номер роликоопоры с начала отсчета для роликоопор, поддерживающих ленту по ширине от горизонтального участка ленты, а для роликоопор, поддерживающих ленту с торца, - от вертикального участка;
п-О - роликоопора (барабан) в начале участка с углом переворота ленты от О до -f, от - до я и (или) от f
/„,/„ -координаты (расстояние от на- чала переворота до роликоопоры)
соответственно (п - 1)-й и п-й роликоопор, м;
L - длина участка с углом перево- О до -|, от -| до я и (или) от -|- до О, м;
t (2, 4, ..., 3, 0) - шаг между
роликоопорами и , м. Определяют составляющую Р, нормальную к рабочей плоскости ленты, от веса Q ленты (фиг. 2) на участке ш:
Р Qcosa ,
/
где
0 - равномерно распределенная нагрузка на холостой ветви ленты от веса Q;
tm- шаг роликоопор, поддержива- ,ющих ленту по ширине;
а п--угол наклона ленты к горитальной плоскости, при перевороте ленты от горизонтального участка до вертикального угол а изменяется от О до
L - длина участка с углом переворота ленты от О до , от до л и (или) от 1 до 0;
1, - расстояние от начала переворота (горизонтального участка ленты) до произвольного сечения.
Определяют составляющую Г, тангенциальную к рабочей плоскости ленты (нор- 45 мальной к торцовой плоскости) от веса Q ленты (фиг. 2) на участке 1т.
Т Qsina Qcosp ciottcos,
я Ib
где
/T - шаг роликоопор, поддерживаю- , щих ленту с торца; Р . - угол наклона ленты к вертикальной плоскости, угол Р изменяется от О до при перевороте ленты от вертикального участка до горизонтального;
/6 - расстояние от начала переворота (вертикального участка ленты) до произвольного сечения.
Закон распределения нагрузки от силы Р на участке между двумя роликоопорами, поддерживающими ленту по ширине (фиг. 4)
9- ocos| 1.
(i:
Площади эпюр от нагрузки ш между двумя соседними роликоопорами обозначают S, 82, 5з, .., , 5„, ... Шаг 1шп определяют из условия равенства нагрузок, действующих на каждом участке между ролико- опорами, т. е.
5„-,5„.(2)
Интегрируя выражение (I), получают
5, f ocosf ., 9o(sinf
25«- sin|/,;
S. f,oCOsfA,/.252 sinf-f ;: 4
52(sin|/.-sin§/,);
S3 (sinJ;/3-sin|/2);
5„, 252(,-sin|-/« 2); (3)
S 5e(sinf/ -sin§/«,);(4)
Учитывая (2) и приравнивая правые части равенств (3) и (4), получают
sin /n-sin| /n-i sin /n i-sin /n 2,
откуда
,;„.
2sin /n i-sin|j-/n 2
(5)
Решая уравнение (5) для значений п 1, 2, 3, ..., п и учитывая, что , получают
sin-fj--Ii l-sin ti;
2L sin /3 3sin- /i;
22.
21
sin§/n-, (rt-l),;
rtsin i.
откуда r-/„ arcsin(nsin);
In p arcsin()
аналогично
io,
ln-i arssin(rt-l)
(7;
Вычитая выражение (7) из выражения (6), получают формулу для определения шага роликоопор, поддерживающих ленту по ширине
in ln-L- {arcsin(nsin| /i) -
Ф 1 -arcsin (rt-l),
()
О
0
5
0
5
0
5
где ч О, 1, 2, 3, .., п-, п, ..., - иом , j роликоопоры с начала отсчета от горизонтального участка ленты
- роликоопора (барабан) в начале
участка с углом переворота ленты
от О до , от -f до я и (или) от -
f до о, при а , 0.
Закон распределения нагрузки от силы
Т на участке между двумя роликоопорами,
поддерживающими ленту с торца
qr ocosll - Повторяя вышеприведенные рассуждения, получают для шага роликоопор, поддерживающих ленту с торца, выражение, идентичное (8), т. е. шаг роликов, поддерживающих ленту с торца, такой же, как и поддерживающих ленту по щирине, но в этом случае отсчет производят от вертикального участка ленты по направлению к горизонтальному, т. е. в данном случае /г О, I, 2, 3, ..., п - 1, п, ..., - номер роликоопоры с начала отсчета от вертикального участка ленты; - роликоопора при а и (.
На фиг. 7 представлены графики зависимости величин щагов роликоопор, поддерживающих ленту по ширине и с торца, от их координаты /„. На участках горизонтального и вертикального расположений ленты шаг роликоопор постоянный. На участках наклонного положения ленты щаг роликоопор подчиняется предложенной зависимости. На участках горизонтального расположения ленты установлены ролики, поддерживающие ленту только по ширине. На вертикальных участках установлены бочкообразные ролики, поддерживающие ленту с торца, и вертикальные цилиндрические ролики, поддерживающие ленту по щирине.
В процессе работы загруженная конвейерная лента 1 огибает с натяжением барабаны 2 и 3. Грузовая ветвь ленты конвейера поддерживается цилиндрическими роликоопорами 4, а холостая ветвь на участках переворота поддерживается по щирине большими 5 и с торца малыми 6 роликоопорами, установленными с переменным шагом, изменяющимся по вышеописанному соотношению.
Установка роликов, поддерживающих холостую ветвь конвейера на участках переворота, с переменным шагом, изменяющимся по предложенному соотношению, обеспечивает снижение материалоемкости конвейера на 8-10%, поскольку требуется меньще
роликоопор, а также снижение энергозатрат, так как уменьшается общее сопротивление движению ленты за счет уменьшения количества опор. За счет выравнивания нагрузок
XI-Х1
на каждом участке холостой ветви между роликоопорами улучшается эффективность и повышается надежность работы ленты, а следовательно, и всего конвейера.
ff-6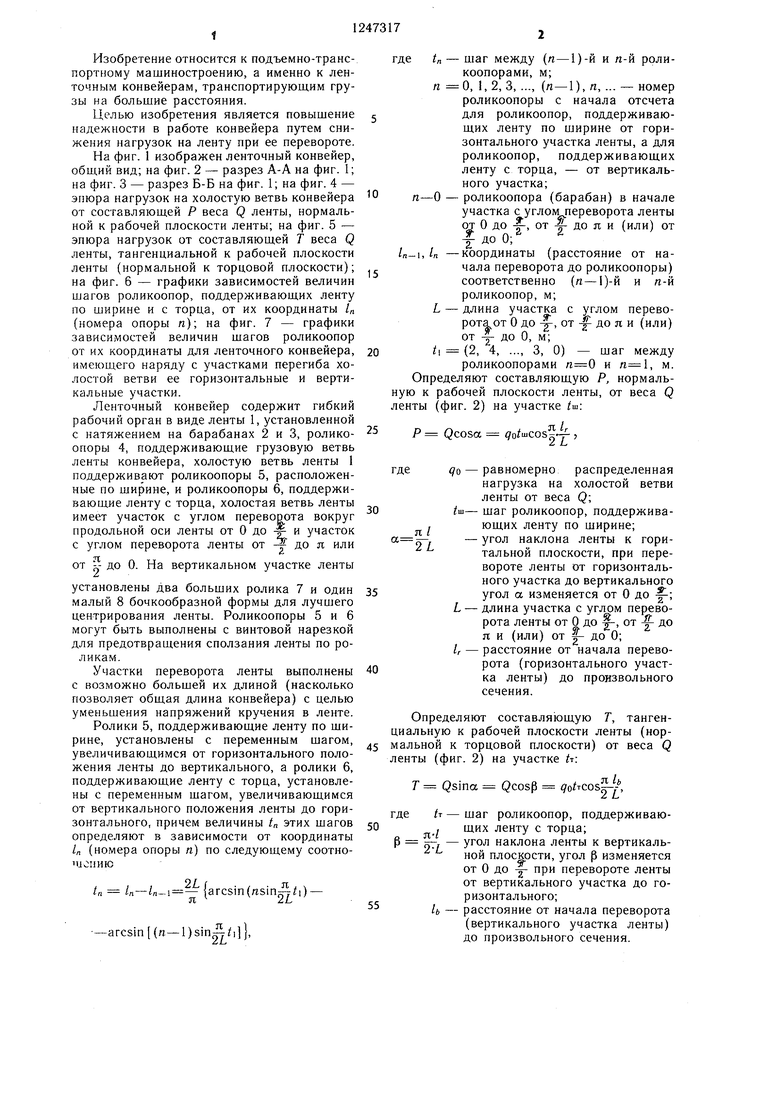

| название | год | авторы | номер документа |
|---|---|---|---|
| Концевая часть ленточного конвейера | 1982 |
|
SU1033403A1 |
| Ленточный конвейер | 1981 |
|
SU960090A1 |
| Устройство для центрирования холостой ветви ленты конвейера | 1983 |
|
SU1122589A1 |
| Ленточный конвейер с криволинейной трассой | 1976 |
|
SU618312A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОРАЧИВАНИЯ ОБРАТНОЙ ВЕТВИ ЛЕНТЫ КОНВЕЙЕРА | 1994 |
|
RU2065831C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕВОРОТА ЛЕНТЫ КОНВЕЙЕРА | 1992 |
|
RU2038273C1 |
| КРИВОЛИНЕЙНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2207971C2 |
| Центрирующее устройство для конвейерной ленты | 2018 |
|
RU2706022C1 |
| Крутонаклонный конвейер | 1990 |
|
SU1740269A1 |
| Устройство для центрирования ленты конвейера | 1983 |
|
SU1142378A1 |

/
Фиг. 2
Фиг. 5
tftgts tn
п 3 2 ZL
п i 4 /
т 9 /у fffo.
фиг. 5
I I
ч
ь II
ч
1 I
I
о fO2O5O4O506070e09ff ffff
o Sft/ fffaf
ё.
iw-:/ {e .}tr и
Го/зиAO fTf
i/V fcmk wfffff e///7fA емз7б1
wac- /nff
/O i/3Of/f7
i/vac/7
f /r7&/
r «7;/7;
)
/O i/3Of/f77.
i/vac/7
f /r7&/
ff ef}e/7a S (Риг. 7
Составитель Г. Ненахов
Редактор Л. ПовханТехред И. ВересКорректор Г. Решетник
Заказ 4070/21Тираж 833Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
| Патент США № 2732058, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Приспособление для строгания деревянных полов, устраняющее работу на коленях | 1925 |
|
SU1956A1 |
| 1971 |
|
SU414160A1 | |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
