а
Изобретение от1 осится к автоматике, в частности к автоматизированным системам управления, и может быть использовано в системах автоматичес- кого управления в том числе в регулируемых и следящих системах электропривода с импульсными датчиками скорости и положения.
Цель изобретения упрощение устройства, увеличение быстродействия, повышение точности и надежности, , :
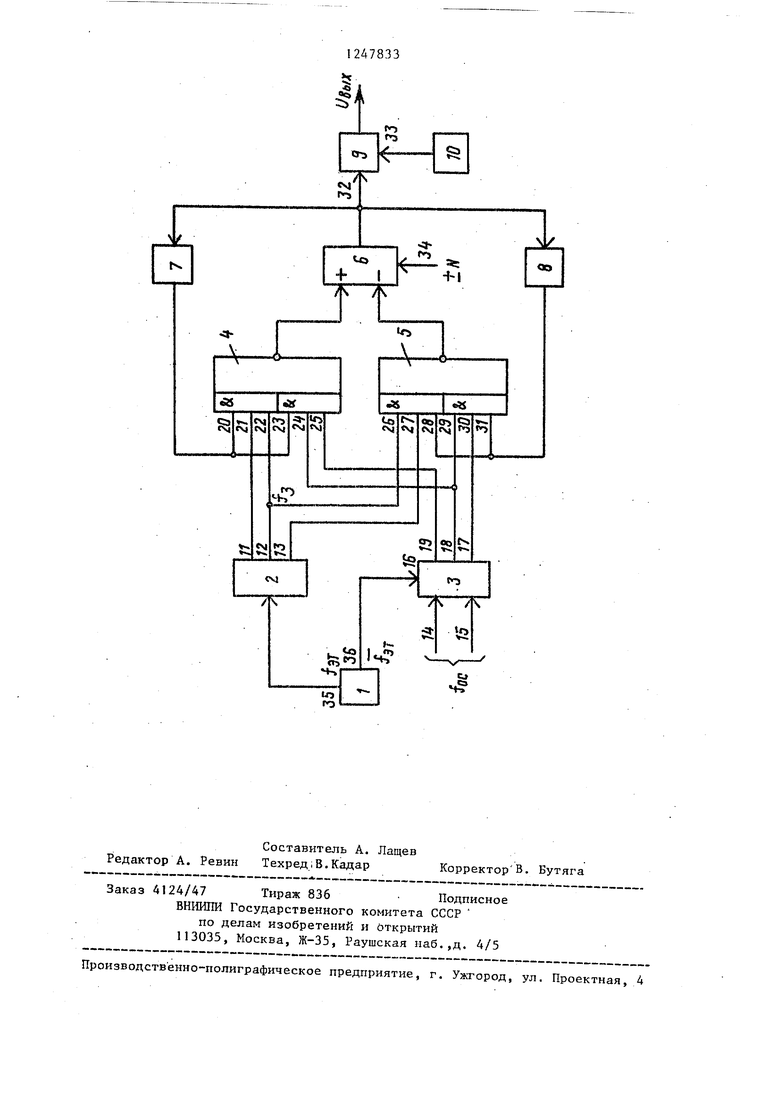
Па.чертеже изображена функциональная схема реверсивного цифро- аналогового интегратора-преобразователя.
Реверс1 Бный цифроаналоговьй интегратор-преобразователь содержит генератор 1 импульсов, блок 2 задания ., блок 3 обратной связи, два логических элемента ЗИ-2ИЛИ-ИЕ 4 и 5, реверсивный счетчик б, блок 7 контроля переполнения счетчика, блок 8 контроля нулевого состояния счетчика, цпфроггналоговый преобразователь (ЩЛ) 9, источник 10 опорного напряжения, входы и выходы 11-36 блоков ипте1 ратора-преобразователя.
Первые выход 35 генератора 1 им- г ульсов подключен к входу блока 2 Г: с дания, а второй выход 36 генератог ра I импульсов подключен к входу 16 блока 3 обратной связи, два других входа 14 и 15 которого подключены к импульсному датчику скорости и перемещения (пе ноказан).Первьй 21 и второй 22 13ХОДЫ HepBoi -o 4 элемента ЗИ-21-ШИ-11Е подключены соответственно к первому i и второму 12 выходам блока 2 задания, пятьш 24 и шестой 2.) входы - к второму 18 и третьему 19 входам блока 3 обратной связи, третий 20 и четвертый 23 входы - к выходу блока 7 контроля переполнения счетчика 6, а выход - к входу Суммирование счетчика 6. Первьп 30 и второй 29 входы второго 5 логического элемента ЗИ-2ИЖ-НЕ подключены соответственна к первому 17 и второму 18 выходу блока 3 обратной связи, н.чтый 26 и шестой 27 входы - к второму 12 и третьему 13 выходу блока 2 задания,.третий 31 и четвертый 28 входы подключены к выходу блока 8 контроля нулевого состояния счетчика 6, а выход - к входу вычн тание счетчика, выход которого подключен к входу блока 7 контроля ггер247833.
похн1ения счетчика 6 и входу блока 8 контроля Нулевого состояния счетчика 6 и первому 32 входу ЦЛП 9, второй вход 33 которого подключен к источни5 ку 10 опорного напряжения.
Реверсивньш цифроаналоговый интегратор-преобразователь работает следующим образом.
Генератор 1 импульсов тактирует
О работу всего устройства. С выхода 35 генератора I снимается прямая последовательность 1с-1Пульсов эталонной частоты f3, а с выхода 36 снимается инверсная последовательность
15 импульсов . Прямая и инверсная последовательности импульсов fj-r и fJ поступают на вход блока- 2 задания и вход ,16 блока 3 обратной связи и осуществляют временную привязку
20 т-1пульсов частоты задания f, и им-эт
пульсов частоты обратной связи f с целью их неодновременного попадания на суммирующий и вычитающий входы реверсивного счетчика 6. Импульсы -с частотой следования f поступают на выход 35 генератора 1 с- вьпсо- да третьего инвертора, а имнульсы с частотой следования Г,- поступают на выход 36 генератора 1. соответственно
с выхода второго инвертора. На выход
12блока 2 задания поступшот импульсы частоты задания f. На выходах
11 и 13 блока 2 формируются логические сигналы, определяющие заданное направление работы. Налтше логической 1 на выходе 11 блока 2 и логического О на выходе 13 соответствует направлеш-да работы Вперед (в). При инвертировании логических сигналов на выходах 11 и
13блока 2 заданное направление работы становится Назад (Н).
Блок задания 2 представляет собой управляемый генератор импульсов,
в качестве которого может быть использован преобразователь напряжение- частота (ПНЧ) или нреобразователь код-частота (ПКЧ). Для согласования выхода операционного усилителя с
ТТЛ-схемами па выходе ПИЧ установлен резистивный делитель напряжения. Выходные гшпульсы управляемого генератора импульсов поступают на вход цепи временной привязки, входящей в
блок 2. Импульсы f.,. с выхода 35 генератора 1, поступающие на вход блока 2, поступают на вход цепи временной привязки, с выхода которой снимаются тактоваиные импульсы f, , поступающие на выход 12 блока 2. Логические сигналы на выходах 11 и. 13 блока 2, соответствующие заданному направлению работы могут задаваться с помощью тумблеров, входящи в блок 2, путем присоединения к выходам 11 и 13 блока 2 шин Общая и Плюс источника питания (через ограничительный резистор).
На входы 14 и 15 блока 3 обратной связи от внешнего импульсного датчика, входящего в состав системы регулирования, поступают две импульные последовательности с частотой следования импульсов foe . Причем частота следования импульсов обратной связи Г„р соответствует скорости перемещения объекта регулирования, а направление перемещения определяется фазовым сдвигом между импульсами с частотой f , поступающими на входы 14 и 15 блока 3. При опережении по фазе на П /2 импульсами на входе 14 блока 3 импульсов на входе 15 блока 3 на его выходе 17 появляется сигнал логической 1, а на выходе 19 - сигнал логического О, что соответствует направлению перемещения Вперед (в). При отставании по фазе импульсов на входе 14 блока 3 относительно импульсов на его входе 15 сигналы на выходах 17 и 19 блока 3 инвертируются, что соответствует направлению перемещения Назад (Н).
БЛОК 3 обратной.связи представляет собой формирователь импульсов импульсного датчика скорости и перемещения, определяющий также направление перемещения объекта регулирования, и цепь временной привязки.
Сигналы с выхода формирователя поступают на выход 17 блока 3, сиг- налы с другого выхода подаются на выход 19 блока 3. Импульсы, частота следования которых соответствует скорости перемещения объекта регулирования, поступают с выхода формирователя на вход цепи временной при- 50которые поступая соответственно на
вязки, идентичной рассмотреннойвходы 20, 23 и 31 , 28 логических элев блоке 2. Импульсы с выходаментов ЗИ-21-ШИ-НЕ 4 и 5, разрешают
36 генератора 1 поступают на входпрохождение частоты задания f и
16 блока 3 и далее на вход цепи вре-частоты обратной связи f на их
менной привязки. Тактованные импуль- 55выходы.
сы fg, поступают на выход 18 блока. Частота задания fj с выхода эле3, а с выхода 18 блока 3 снимаютсямента ЗИ-2ИЛИ-НЕ 4 поступает на сумсформированные импульсы. Импульсы мирующий вход счетчика 6. Кодова
0
частоты задания f и частоты обратной связи foi- через логические элементы ЗИ-2ИЛИ-НЕ 4 и 5 поступают Via входы реверсивного счетчика 6. С вы- 5 хода источника 10 опорного напряже- . ния на вход 33 цифроаналогового преобразователя 9 подается опорное напряжение , где q - вес младшего разряда ЦАП; п - количество разрядов ЦАП. При этом статическая характеристика цифроаналогового преобразователя смещается в область отрицательных выходных нап ряжений. Нулевому напряжению на выходе ЦАП 9 5 соответствует кодовая комбинация 1,0,...,О на его входах и выходах счетчика 6, т.е. логическая I в старшем разряде и логический О во всех остальных разрядах.
При кодовой комбинации 1,1,...,1, на входах ЦАП 9 его выходное напряжение равно
0
и
чЬ-1
вых
-q( -1).,
. Кодовой комбинации О,О,...,О на входах ЦАП 9 соответствует напряжение на его выходе, равное
, И- 1
и
еыу
При неподвижном объекте регулирования и сочлененном с ним датчиком перемещения частота обратной связи Гд равна нулю.
При равенстве нулю частоты задания f напряжение на выходе ЦАП 9 также равно нулю.
После предварительного выбора направления работы, например Вперед (в) и частоты задания f, на выходе 1 блока 2 появляется сигнал логической 1, а на выходе 13 блока 2 - сигнал логического О. С выхода 12 блока 2 импульсы с частотой следования Гз поступают на вход 22 логического элемента ЗИ-2ИЛИ-НЕ 4 и на вход 26 элемента ЗИ-2И11И-НЕ 5. Так как при нулевом выходном напряжении ЦАП 9 счетчик 6 не находится ни в нулевом состоянии, нив режиме переполнения, то на выходах блоков 7 и 8 присутствуют логические единицы,
S1
комбинация иа. выходах счетчика б с приходом каждого импульса частоты задания f. увеличивается иа единицу
Напряжение на выходе 9 также ступенчато возрастает. Положительное выходное наиряжение , ЦА11- 9 проходит через усилитель мощности и подастел иа исполнительный двигатель, который приводит в движение объект регулировашгя и сочлененный с ним 1фп 1ульсный датчик перемещения. После начала, двзисеиия от №1нульс пого датчика на выходы 14 и 15 блока 3 начинают поступать сдвинутые иа l) импульсы с частотой f . На выходе 17 блока 3 появляется сигнал логической I, а иа В1)ходе 19 - сигна : логического О, что соответствует направлению перемещения Вперед (В). С выхода 18 OjEOKa 3 частота обратной связи ;Г„ через логический э.чемент ЗП 21ПШ- НЕ 5 ноступает па пьгаитающий вход счетчика 6. С приходом каждого lu-i- с частотой f,-,c выходное па2
прялсений ДАЛ 9 уменьшается ь:а один кв йнт. При достилсеиии Г Белич|- ны f.j в системе регулирования наступает установившийся режим работы. Скорост перемэщепия объекта регулировать постоянна и иронорциональна f. На выходах счетчика 6 образуется кодовая комбинация, соответствующая ин- те1 ралу разности частоты задания fj и частоты обратной связи. При выб- ршпюм паправлении работгл Вперед (Б) и при 1у f пололаательное на- пряжепне па выходе IJ/iH 9 увел1Г4ива- 2 1 ся, а при уменьшается. При прекращепии поступления 1-1Мпуль- сов с частотой f-j от блока 2 па счет чигс 6 поступают только импульсы с частотой IQJ, , уменьшающие его содержимое и соответственно выходное па- пряжение иди 9. При еиьшеипи кодовой комбинации счетчика до 1,0,..., О на выходе ЦЛИ 9 устанавливается выходное нанргскение, равное пулю, При дальнейшем поступлении импульсов с частотой , на вычитающий вход счетчика б напряжение на выходе 1ДА11 9 мепяет знак с полоягительного на отрицательный и возрастает по абсолютной величине. З силепное напря;кени поступает на двигатель, который под его действием меняет направление вращения.
После перемены направления нерё- мещения иа противоположное фазовый
7833 б
сдвиг импульсных последова тельностей, поступающих па входы 14 и 15 блока 3, меняет знак и на вькоде 17 блока 3 появляется логический О, а па
5 выходе 9 блока 3 - логическая 1, что соответствует направлению перемещения Пазад (Н).
При этом элемент ЗИ-21-ШИ-НЕ 5 закрывается лоптееским О, иосту10 нающим с выхода 17 блока 3, и импульсы обратной связи с частотой foe на проходят на вычитающий вход счетчика 6. Сигнал логической 1 поступает с выхода I9 блока 3 на вход
15 элемента ЗИ-2ИЛИ-ЫЕ 4 и разрешает
0
5
0
а 5 0 5
зад
3
ирохолсдение импульсов частоты Г„ ла суммирующий вход счетчика 6. нульсы f уменьшают по абсолютной величине выходное напряжение ЦАП 9 до нуля. В случае ненулевой скорости перемещения регулируемого объекта выходное нанряжение 1ДАП 9 номеняет знак и процесс, онисапньгй выше, повторяется до полной остановки объекта регулирования.
При перемене заданного направления работы на противоположное на I блока 2 устанавливается сигнал логического О, а на выходе 13 сигнал логической 1, что ответствует направлению работы На- (PI). Пмпульсы частоты задания
с выхода 12 блока 2 поступают на вход 26 логического элемента ЗИ- 21ШИ-НЕ 3 и с его выхода - иа вычитающий вход счетчика- б.
После начала движения регулируемого . иа выходе 17 блока 3 появляется сиг-нал логического О, а на выходе 19 - сигнал логической I, что соответствует направленшо перемещения Пазад (П). Пмпульсы обратной связи с частотой f поступают на вход 24 элемента ЗИ-2ГШИ-Р1Е 4 и с выхода последнего постзшают на су1-1мирующий вход счетчика 6, При этом напряжение иа вьгходе ЦАП 9 имеет отрицательный знак. Остальные процессы в устройстве протекают аналогично вьше описанным.
В режиме реверса (при смене знака зада-чного направления работы, происшедшим до момента полной остановки регулируемого объекта), т.е. при выходном напряжении 11ДП 9, не равным нулю, импульсы с частотой f начинают ноступать па нротивонолож- пый вход счетчика б, на который подаются также импульсы с -частотой Г„ При этом на выходе счетчика образуется кодовая комбинация, соответствующая интегралу суммы частоты f и f . После перемены направления перемещения регулируемого объекта процессы в устройстве протекают аналогично вышеописанным.
При использовании устройства в режиме позиционирования требуемое перемещение может быть задано путем записи в счетчик определенного чнс- ла импульсов ±Ш (в зависимости от заданного направления работы), подаваемого либо на суммирующий, либо на вычитающий входы счетчика 6. Требуемое перемещение может быть задано также путем подачи параллельного дополнительного кода на вход 34 предварительной установки счетчика.
Блоки 7 и 8 цифрового интегратора-преобразователя запрещают прохождение импульсов соответственно на суммирующий и вычитающий входы счетчика 6 при кодовых комбинациях 1,1,..., либо 0,0,..., выходах счетчика, что предотвращает появление ошибки при динамических режимах работы например, при резком изменении частоты задания f g..
Блок 7 представляет собой схему И-НЕ, а блок 8 схему 1-ШИ, в ходы которых соединены с выходами реверсивного счетчика 6.
При работе в установившемся режиме при. скорости перемещения, близкой к нулю, регулируемый объект совершает колебания в пределах одной или нескольких дискрет вокруг установившегося положения. При этом знак частоты foe периодически меняется. Так как в цифровом интеграторе-преобразователе заданное направление работы и направление перемещения определя- ются независимо друг от друга в блоках 2 и 3 соответственно, то в отличие от прототипа в предлагаемом устройстве производить реверс или
устанавливать новое задание можно не дожидась нулевой скорости перемещения регулируемого объекта, что существенно расширяет полосу пропуска- НИН системы регулирования, увеличивает быстродействие и, следовательно, динамическую точность.
Формула изобретения
Реверсивный цифроаналоговый интегратор-преобразователь , содержа- реверсивный счетчик, подключен- ньй выходом к входам блока контроля
переполнения счетчика, блока контроля нулевого состояния счетчика и первому входу цифроаналогового преобразователя J генератор импульсов, под- ключенньш первым выходом к входу
блока задания, а вторым выходом - к входу блока обратной связи, два других входа которого подключены к импульсному датчику скорости, отлич ающийся тем, что,
с целью увеличения быстродействия, повьшения точности и надежности, в него введены источник опорного напряжения и два элемента ЗН-2ИЛИ-НЕ, причем первый и второй входы первого элемента ЗИ-2ИЛИ-НЕ подключены соответственно к первому и второму выходам блока задания, пятый и «шестой входы - к второму и третьему выходам блока обратной связи, третий
и четЕ.ертый входы - к выходу блока контроля переполнения счетчика, а выход - к входу Суммирование счетчика, первые, и вторые.входы второго элемента ЗИ-2ИЛ11-НЕ подключены соответственно к первому и второму выходам блока обратной связи, пятые и шестые входы - к второму и третьему входам блока задания, третий и четвертый входы - к выходу блока
контроля нулевого состояния счетчика, выход источника опорного напряжения - к второму входу цифроаналогового преобразователя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный цифровой интегратор | 1984 |
|
SU1238030A1 |
| Устройство для разбраковки полупроводниковых диодов | 1983 |
|
SU1164636A1 |
| Устройство для управления положением исполнительных элементов | 1983 |
|
SU1226413A2 |
| Устройство для измерения интенсивности линии в оптическом спектре | 1987 |
|
SU1509625A1 |
| Цифровой измеритель электрической энергии многофазной сети | 1988 |
|
SU1647443A1 |
| Устройство для регулирования компенсатора реактивной мощности | 1986 |
|
SU1372466A1 |
| Формирователь случайных сигналов | 1990 |
|
SU1732419A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277034A1 |
| Устройство для сварки давлением | 1985 |
|
SU1242320A1 |
Изобретение относится к автоматике, в частности к автоматизированным системам управления с импульсными датчиками скорости и положения. Целью изобретения является увеличение быстродействия, повьше- ние точности и надежности. Достигается это путем ввода источника опорного напряжения, подключенного-к одному из входов цифроан.алогового преобразователя,и двух логических элементов ЗИ-2ИЛИ-НЕ, включенных между вькодами блоков задания и обратной связи и входами реверсивного счетчика. Это позволило упростить уст- . ройство, улучшить помехозащищенность и надежность работы, а также увеличить быстродействие за счет возможности независимого определения направления задания и направления перемещения. Устройство может быть использовано в цифровых и цифро- аналоговых электроприводах и следящих системах. 1 ил. (Л to 41 М 00 САЭ 00
| Реверсивный цифро-аналоговыйиНТЕгРАТОР-пРЕОбРАзОВАТЕль | 1977 |
|
SU813361A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровой следящий электропривод | 1979 |
|
SU800960A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
