Изобретение относится к оборудованию для производства нити, в частности химических волокон.
Целью изобретения является повышение качества намотки нити путем с1 ижения неравномерности силы контактного взаимодействия паковки и фрикционного ЦИЛИ1 Д- ра.
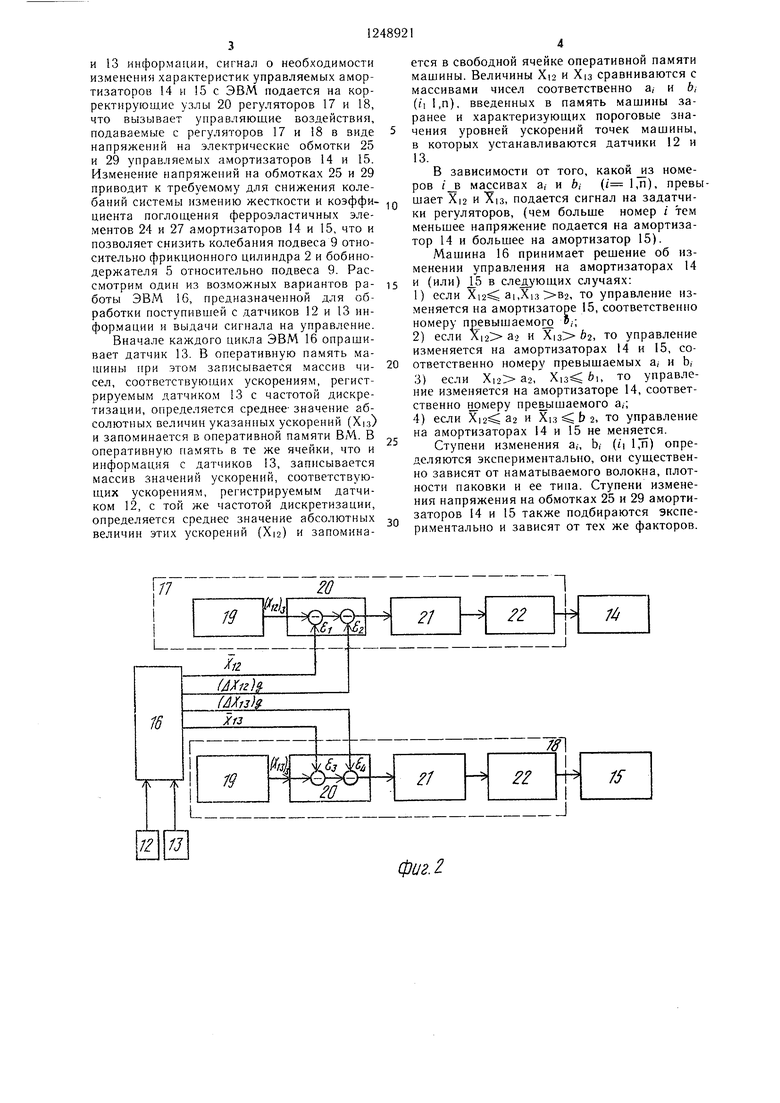
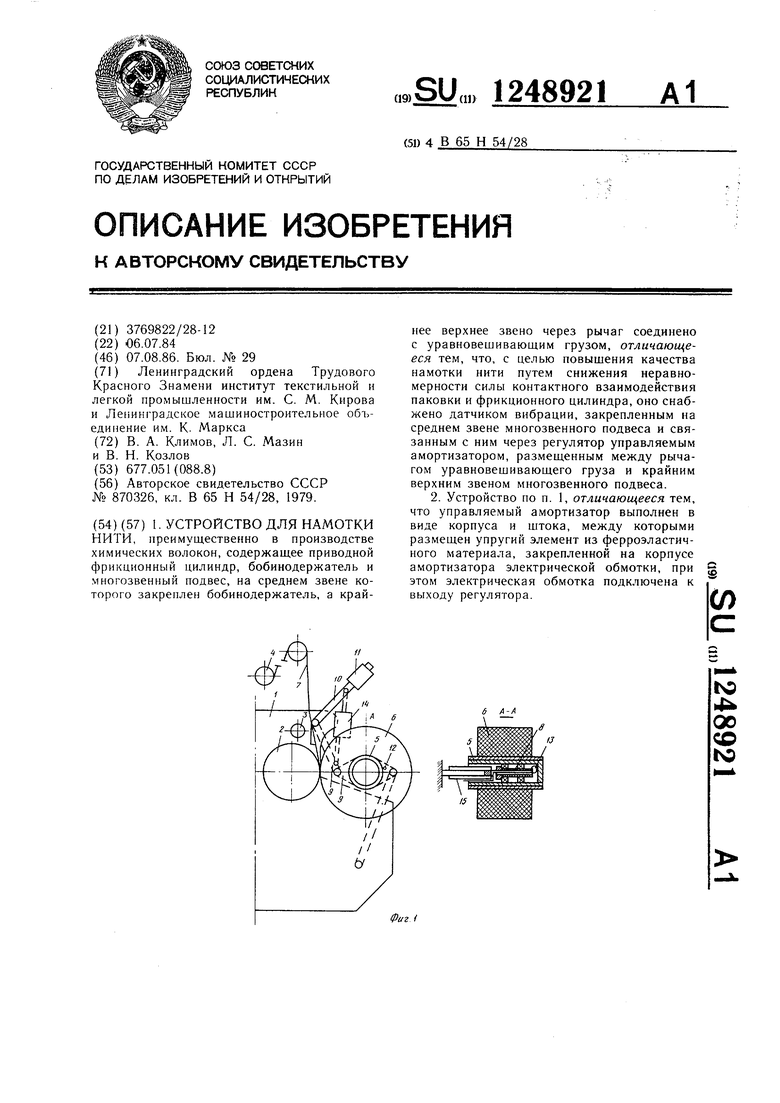
На фиг. 1 представлена кинематическая схема устройства с размещенным датчиком вибрации и амортизатором и разрез А -А; на фиг. 2 - схема регулирования; на фиг. 3 и 4 - варианты конструкции амортизаторов.
Устройство для намотки нити содержит установленные на корпусе 1 (фиг. 1) приводной фрикционный ци.индр 2, нитерасклад- чик 3, продольные диски 4, бобинодержа- тель 5 с размещенной на кем паковкой б для наматывания нити 7. Бобинодержа- гель 5 установлен в подшипниковых опорах на оси 8 бобииодержателя, которая в свою очередь жестко крепится на среднем звене трехзвеи}юго подвеса 9. К крайнему верхнему звену по.авеса 9 на жестко связан юм с ним рычаге 10 прикреплен уравновешивающий груз 11. На звене подвеса 9 и на оси 8 бобинодержа- геля 5 закреплены датчики 12 и 13 для измерения вибраций. Между .м 10 и крайним верхним рычагом нодвеса 9, а также на оси 8 бобинодержателя 5 установлены амортизаторы 14 и 15.
Устройство содержит регулятор, включающий (фиг. 2) блок 16 обработки сигналов датчиков, выполнен1гый, например, в виде ЭВМ «Электроника-60, и регуляторы 17 и 18 напряжения. Кажд.ый регулятор напряжения содержит задатчик 19, корректирующий узел 20 (например, прибор КП-2, усилитель 21, блок 22 управления напряжением) . Датчики 14 и 15 подключены к соответствующим входам ЭВМ 16, выходы которой соединены с входами корректирующих узлов 20 соответствующих регл лятороа 17 и 18 напряже}шя. В каждом регуляторе напряжения задатчик 19 связан с одним из входов корректирующего узла 20, выход которого через усилитель 21 и блок 22 управления напряжением подключен к соответ- ствуюи1.ему амортизатору 14 и 15.
В качестве датчиков 12 и 13 для измерения вибраций могут быть использованы, например, датчики ускорений типа Г1Д--2, ПД-З, Г1Д--4 и т.д.
Места размеп1ения датчиков 12 и 13 выбраны из следующих соображений. Для уст ранения брака паковок 6, вызванного от клонениями силы контактного взаимодействия паковки 6 с фрикционны.м цилиндром 2 от требуемого по TexHOj orn4ecKnM соображениям значения, а также для спиже- ;1ия неравномерности линейной плотности МИТИ из-за колебаний паковки 6, требуется снизить вибрации отдельных узлов намо
-
0
5
0
5
0
.5
0
5
0
5
ТОЧНОГО механизма. Причем речь идет не о всех узлах, а о среднем звене подвеса 9, вместе с которым паковка 6 перемещается в направлении деГ1ствия силы контактного взаи.модействия относительно фрикционного цилиндра 2 в процессе колебаний, а также о колебаниях бобинодержателя 5 относительно подвеса 9 и вместе с тем относительно фрикционного цилиндра 2. Исходя из сказанного, датчик 12 установлен на среднем звене подвеса 9 для измерения вибрации (усорения) этого звена в направлении действия силы контактного взаимодействия паковки 6 с фрикционным цилиндром 2. Датчик 13 установлен на конце кон- сольно закрепленной в подвесе оси 8 бобинодержателя 5, так как именно в этом месте вибрация бобинодержателя 5 относительно подвеса 9 г аиболее существенна. Направления из.мерения вибраций датчиками 12 и 13 практически взаимно пе)пепдикулярны, что важно, чтобы датчиК( 13 не регистрировал колебаний сре.анего зиепа подвеса.
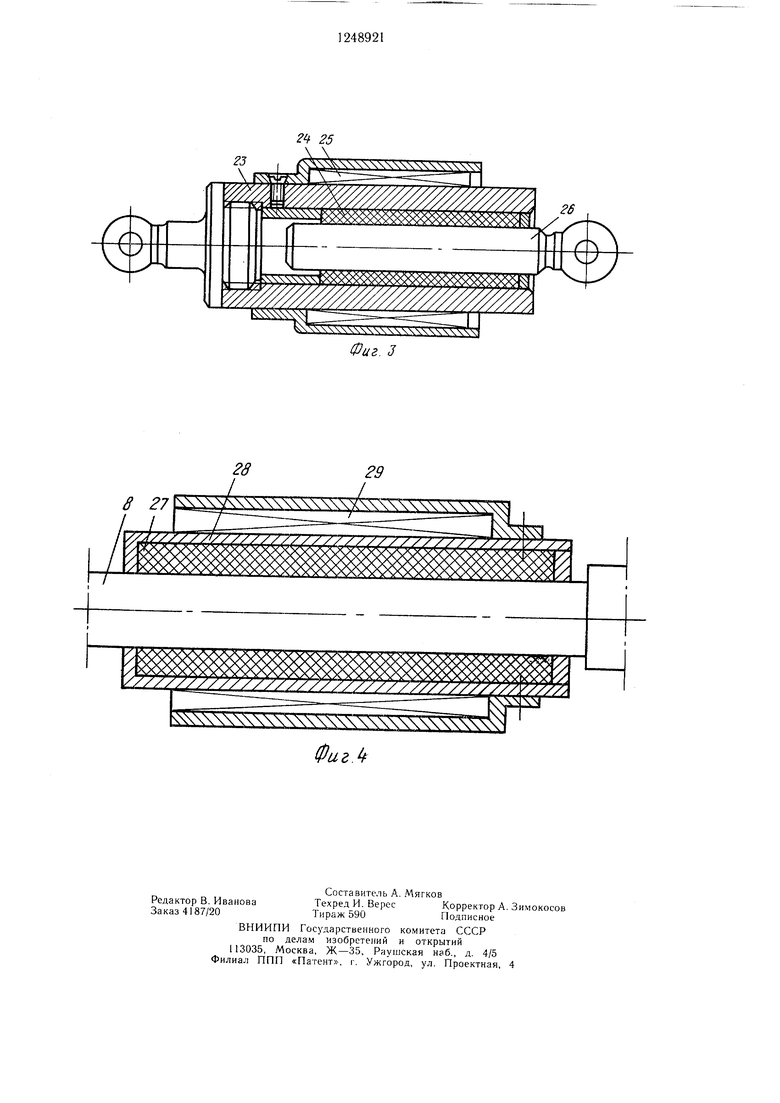
Амортизатор 14 может, например, иметь вид, приведенный на фиг. 3. Он представляет собой трущуюся пару, неподвижный э.пемент которой состоит кз корпуса 23, внутри которого расположен ферроэластич- ный цилиндр 24, и электрической обмотки 25 управления. Подвижный элемент представляет собой LirroK 26.
Амортизатор i5 может иметь вид, приведенный на фиг. 4. Он представляет собой ферроэластичный цилиндр 27, размещенный с натягом между корпусом 28 и осью 8 бобинодержателя 5, и электрическую обмотку 29 управления.
Устройство работает следующим образом.
Нить 7, огибая прядильные диски 4, наматывается на бобину 6, закрепленную па бобинодержателе 5. По мере наматывания нити па паковку (особенно это существенно для паковок кассои 18 кг) из.меняется ее ;.иа,метр, а следовательно, и угловая скорость вра1цения паковки с бобинодержателем. Причем изменение уг, 1овой скорости паковки происходит в достаточно игироких преде- .лах. Кроме того, при скорости приема нити 1000 м/мин существенными с точки зрения влияния lia виброактивность узлов намоточного механизма оказывается неурав- 1ювещенность паковки 6 с боби нодержате- .чем 5 и микронеровности на поверхности паковки 6.
Колебания паковки 6 с подвесом 9 относительно фрики.ионпого цилиндра 2 в на- пра.нлег1ии действия силы контактного взаимодействия регистрируются датчиком 12, а колебания оси 8 бобинодержателя 5 от- носитель11О подвеса 9 - датчико.м 13. Ре- гитрируемые датчиками 12 и 3 сигналы поступают в ЭВМ 16. Считывание информации ь; оперативную память ЭВМ 16 осуществляется программно. После програм- М1к)й обработки, поступившей с датчиков 12
и 13 информа ии, сигнал о необходимости изменения характеристик управляемых амортизаторов 14 и 15 с ЭВМ подается на корректирующие узлы 20 регуляторов 17 и 18, что вызывает управляющие воздействия, подаваемые с регуляторов 17 и 18 в виде напряжений на электрические обмотки 25 и 29 управляемых амортизаторов 14 и 15. Изменение напряжений на обмотках 25 и 29 приводит к требуемому для снижения колеется в свободной ячейке оперативной памяти машины. Величины Xi2 и Х|з сравниваются с массивами чисел соответственно а, и 6, (/1 1,п), введенных в память машины заранее и характеризуюплих пороговые значения уровней ускорений точек машины, в которых устанавливаются датчики 12 и 13.
В зависимости от того, какой из номеров (J3 массивах а, и ft, (/ 1,п), превыбаний системы измению жесткости и коэффи- Q шает X|2 и Xis, подается сигнал на задатчи- циента поглощения ферроэластичных эле-ки регуляторов, (чем больше номер / тем
ментов 24 и 27 амортизаторов 4 и 15, что именьшее напряжение подается на амортизапозволяет снизить колебания подвеса 9 отно-тор 14 и большее на амортизатор 15).
сительно фрикционного цилиндра 2 и бобино-Машина 16 принимает решение об издерх ателя 5 относительно подвеса 9. Рас-менении управления на амортизаторах 14
смотрим один из возможных вариантов ра- is (или) j в след ющих случаях:
1) если Xi2 ai,Xi3 В2, то управление изменяется на амортизаторе 15, соответственно номеру пр евышаемого о/;
2)если Л|2 аз и Х|з 2, то управление изменяется на амортизаторах 14 и 15, соответственно номеру превышаемых а, и Ь,
3)если Х|2 а2, Xi3 6i, то управление изменяется на амортизаторе 14, соответ20
боты ЭВМ 16, предназначенной для обработки поступившей с датчиков 12 и 13 информации и выдачи сигнала на управление. Вначале каждого цикла ЭВМ 16 опрашивает датчик 13. В оперативную память машины при этом записывается массив чисел, соответствующих ускорениям, регистрируемым датчиком 13 с частотой дискретизации, определяется среднее- значение абсолютных величин указанных ускорений (Х|з) и запоминается в оперативной памяти ВМ. В с оперативную память в те же ячейки, что и информация с датчиков 13, записывается массив значений ускорений, соответствующих ускорениям, регистрируемым датчиком 12, с той же частотой дискретизации.
ственно номеру превь1шаемого а,;
4) если Х:2 а2 и Х|з Ь 2, то управление
на амортизаторах 14 и 15 не меняется.
Ступени изменения а,-, Ь, {i 1,п) определяются экспериментально, они существенно зависят от наматываемого волокна, плотности паковки и ее типа. Ступени изменения напряжения на обмотках 25 и 29 амортиопределяется среднее значение абсолютных n заторов 14 и 15 также подбираются экспе- величин этих ускорений (Xi2) и запомина-риментально и зависят от тех же факторов.
/7
ff
ственно номеру превь1шаемого а,;
4) если Х:2 а2 и Х|з Ь 2, то управление
на амортизаторах 14 и 15 не меняется.
Ступени изменения а,-, Ь, {i 1,п) определяются экспериментально, они существенно зависят от наматываемого волокна, плотности паковки и ее типа. Ступени изменения напряжения на обмотках 25 и 29 аморти заторов 14 и 15 также подбираются экспе- риментально и зависят от тех же факторов.
Л
Фиг. 3
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ | 2012 |
|
RU2496928C1 |
| "Устройство для намотки нити на бобину | 1977 |
|
SU704877A1 |
| Устройство для намотки нити на бобину | 1991 |
|
SU1770245A1 |
| УСТРОЙСТВО ДЛЯ НАМОТКИ НИТИ | 2014 |
|
RU2571262C1 |
| Устройство для непрерывной намотки текстильных паковок | 1989 |
|
SU1646969A1 |
| Мотальная машина | 1990 |
|
SU1720976A1 |
| Устройство для непрерывной намотки текстильных паковок | 1990 |
|
SU1784030A3 |
| Устройство для намотки нити | 1979 |
|
SU870326A1 |
| Устройство для намотки нити набОбиНу | 1978 |
|
SU815092A1 |
| Устройство для намотки нитевидного материала | 1987 |
|
SU1512899A1 |
28
Фиг.
| Устройство для намотки нити | 1979 |
|
SU870326A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
