В ОСНОВНОМ авт. св. Хо 112245 описан ме.ханизм запора стоек коника п:1атформ и лесовозных сцепов узкоколейных железных дорог, выпо: ненный в виде рычажной системы, одно звено которой, взаимодействующее с нижним концом поворотной СТОЙКИ, с целью обеспечения автоматического включения запора, выполнено в виде поворотного относительно горизонтальной оси двуплечего рычага, снабженного на одном конце роликовым упором, а на другом - противовесом- При этом для заихиты от случайных ударов и повреждениГ рычажная система и тягн для поворота рычагов помещены внутри коника.
Однако такая конструкция л еханизма запора не пред1)гвращаег самопроизвольного его раскрывания при действии динамических нагрузок, ЧТО является препятствием для использоваиия его на авто.мап1Н11ах и автоприцепах.
В описываемом механизме этог недостаток устранен те.м, что нротивовесный конец двуплечего рычага выполнен с зевом трапециевидного со скругленными углами очертания, соответствуюп1его конфигурации боковой стороны взаимодействуюн1его с ним фиксирующего секторного кулачка. Кулачок насажен на размещенную в гнездах поперечной балки коника ось и поворачивается в вертикальной плоскости для освобождения стоек с помощью тяги, связанной с рукояткой управ.1ения мехаиизмо.м. Центр тяжести двуплечего рычага в транспортном положении располагается со стороны противовеса выше оси вращения рычага, ось упорного ролика размещена ниже оси вращения рычага, а центр тяжести кулачка находится между вертикальными линиями, проведенными через ось вращения двуплечего рычага и размен1енную под верхним скоЛс 124964
сом зева ось вращения кулачка. Механизм занора стоек для предотвращения самопроизвольного поворота двуплечего рычага при освобождении, стоек оборудован зубом, взаимодействующим с зубом кулачка.
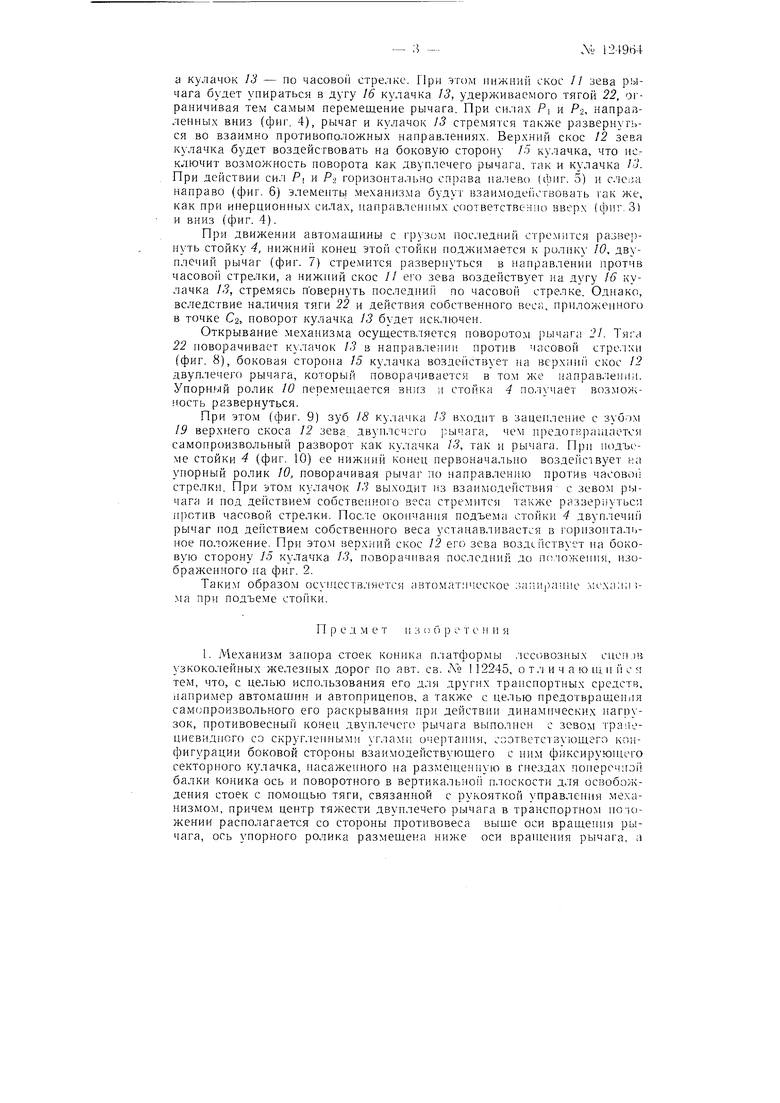
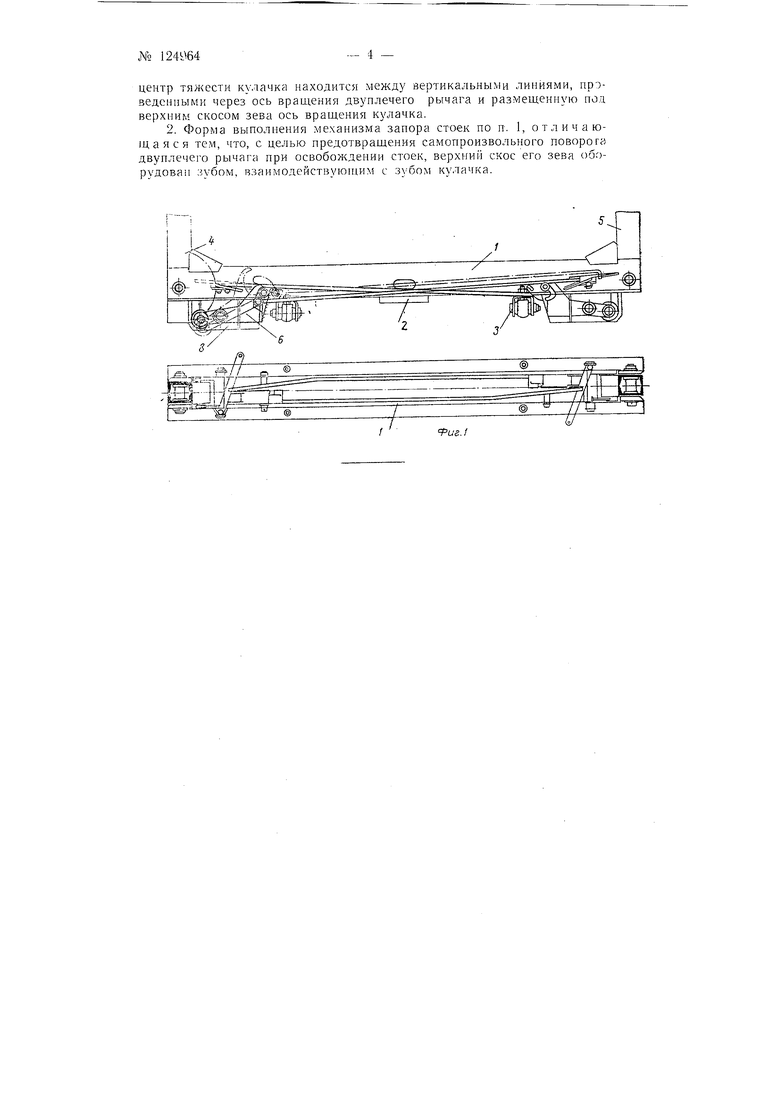
На фиг. 1 изображен коник автомобильного прицепа в двух проекциях; на фиг. 2 - механизм запора в закрытом состоянии без нагрузки; на фиг. 3 --- механизм при движении автомащины, при действии инерционных сил вверх; на фиг. 4 - то же, при действии инерционных CH.I вниз; на фиг. 5 - то же, при действии инерционных сил справа налево; на фиг. 6 - то же, при действии инерционных сил слева направо; на фиг. 7 -- положение механизма при воздействии нагрузки от нижнего конца стойки на упорный ролик двуплечего рычага; на фиг. 8 - механизм в момент начала открывания; на фиг. 9 - то же, в открытом положении; на фиг- 10 - момент поднятия стойки и автоматического запирания механизма.
Коник, на который монтируется механизм запора, состоит из поперечной коробчатой балки /, снабженной центральной опорой 2 д.ля шкворня автомобиля и опорными роликами 3. На концах балки предусмотрены расточки для осей поворотных стоек 4 и 5. Коник оборудован дву.мя одинаковыми (правым и левым) механизмами запора стоек.
Основными частями каждого из механизмов запора являются дву 1лечий рычаг, секторный кулачок и система управления.
Двуплечий рычаг состоит из корпуса 6, имеющего в центре расто iки для оси 7, размещенной в гнездах кронщтейна 8 балки /. На одно.м конце корпуса имеется также расточка для оси 9 упорного ролика Ю. На втором конце корпус 6 и.меет зев трапециевидного со скругленными углами очертания и с пологими нижним /У и верхним 12 скосами.
Очертание зева соответствует конфигурации боковой стороны взаимодействующего с ним фиксирующего кулачка /5, выполненного в ви.ае сектора, ограниченного боковыми сторонами 14 и 15 и дугой 16. Кулачок /5 насажен на ось /7, смонтированную в гнездах балки /.
В нижней части кулачка 13 предусмотрен зуб /5, взаимодействуюпшй с зубом 19 верхнего скоса 12 зева двуплечего рычага. На переднем конце корпуса 6 двуплечего рычага имеется выступ 20, выполняющий роль противовеса. Центр тяжести двуплечего рычага находится в точке Ci, которая в транспортном положении (при закрытом механизме) располагается со стороны выступа (противовеса) 20, выще оси 7 вращения двуплечего рычага. Центр тяжести кулачка 13 соответственно расположен в точке Сг, которая находится между вертикальной линией аа, проведенной через Счь 17 вращения кулачка, и вертикальной линией bb, проведенной через ось 7 вращения двуплечего рычага.
Система управления состоит из рычага 21, посредством тяги 22 соединенного с кулачком 13.
В транспортном положении двуплечий рычаг находится в горизонтальном положении и его упорный ролик 10 взаимодействует с нижним концом стойки 4, препятствуя ее развороту. От самопроизвольного разворота двуплечий рычаг удерживается с помощью взаимодействурощего с зевом кулачка 13.
При транспортировке автомашины под влиянием толчков при езде на неровной дороге, при трогании с места и т. д. механизм может нодвергаться действию инерционных нагрузок различного направления и величины. Так, например, при действии вертикальных и направленных вверх инерционных нагрузок Р и Р, которые соответственно приложены в центре тяжести Ci двуплечего рычага и Сг сектора (фиг. 3), рычаг будет стремитьея развернуться в направлении против часовой стрелки.
а кулачок 13 - по часовой стрелке. При этом нижний скос // зева рычага будет упираться в дугу 16 кулачка 13, удерживаемого тягой 22, oiраничивая тем самым перемещение рычага. При сила.х Я; и РЗ, направленных вниз (фиг. 4), рычаг и кулачок 13 стремятся также развернуться во взаимно противоположных направлениях. Верхний скос 12 зева кулачка будет воздействовать на боковую сторону /5 кулачка, что исключит возможность поворота как двуплечего рычага, так и кулачка 13. При действии си..1 Р и Р- горизонтально сп);1ва иа.чево (фиг. 5) и слс;;а направо (фиг. 6) элемеить) механизма будут взаи.модепствовать гак же, как при инерционных сила.х, направленных соответственно вверх (фнг.З) и вниз (фиг. 4).
При движении автомашины с грузом последний стре.мигся развернуть стойку 4, нижний конец этой стойки ноджимается к ролику 10, двуплечий рычаг (фиг. 7) стре.мится развернуться в нанравлении против часовой стрелки, а нижний скос // его зева воздействует на дугу 16 кулачка 13, стремясь повернуть последний по часовой стрелке. Однако, вследствие наличия тяги 22 и действия собственного веса, приложепного в точке Cz, поворот кулачка 13 будет исключен.
Открывание .механизма осуц ествляется поворото.м рычага /. Тя1а 22 поворачивает кулачок 13 в направлени против часовой стрс.ччи (фиг. 8), боковая стороиа 15 кулачка воздействует на всрхниГ скос 12 двуплечего рычага, который поворачивается в том иаправ.чении. Упорный ролик 10 переменшегся вниз и стойка 4 получает возмол .ность развернуться.
При этом (фиг. 9) зуб 18 ку.чачка 13 входит в зацепление с зуб )м 19 верхнего скоса 12 зева, двуплечего рычага, чем предотвращается самопроизвольный разворот как -:улачка 13, так и рычага. При нодъсме стойки 4 (фиг. 10) ее нижний конец первоначально воздействует на упорный ролик 10, поворачивая рычаг по направлению против часово стрелки. При этом кулачок 13 выходит из взаимодействия с зево.м рычага и под действием собствеино1о веса стремится также раззернутьсл п)отив часовой стрелки. Пос,1е окончания подъема стойки 4 двуплечи) рычаг иод действием собственного веса устанавливается в горизонтальное положение. При этом верхний скос 12 его зева воздействует на боковую сторону 15 кулачка 13, поворачивая последний до псучожения, изображеиного на фиг. 2.
Таким образом осуществляется автоматическое :-;ariiii)a;ine :vK-xa:i;i sма при подъеме стойки.
Предмет изо б р о т е 11и я
1. Механизм запора стоек коника платформы лесовозных сиен .IB узкоколейных железных дорог по авт. св. 112245, о т.ч и ч а ю LU и и с тем, что, с целью использования его для других трапспортных средств, например автомашин и автоприцепов, а также с целью предотвращеН 1я сам(;произвольного его раскрывания при действии динамических нагрузок, противовесный коней двуплечего рычага выполпен с зевом трапециевидного со скруг.ченнымм углами очертания, сг/ответствуюнлего конфигурации боковой стороны взаимодействующего с ним фиксируюидего секторного кзлачка, насаженного на ,енную в гиездах понерсч;1эГ балки коника ось и поворотного в вертикалbHoii плоскости для освобождения стоек с помощью тяги, связанной с рукояткой управления механизмом, причем центр тяжести двуплечего рычага в транспортиом иоюжении раснолагается со стороны противовеса выще оси вращения рычага, ось упорного ролика размещена ниже оси вращения рычага, а
центр тяжести кулачка находится между вертикальными линиями, проведенными через ось вращения двуплечего рычага и размещенную под верхним скосом зева ось вращения кулачка.
2. Форма выполнения механизма запора стоек по н. 1, отличаю1Д а я с я тем, что, с целью предотвращения самопроизвольного поворога двуплечего рычага при освобождении стоек, верхний скос его зева оборудован зубом, взаимодействуюншм с зубом кулачка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм запора стоек коника | 1957 |
|
SU112245A1 |
| УСТРОЙСТВО для ЗАПИРАНИЯ СТОЕК И БОРТОВ ТРАНСПОРТНОГО СРЕДСТВА | 1972 |
|
SU360256A1 |
| Устройство для запирания стоек и бортов транспортного средства | 1976 |
|
SU656894A2 |
| ТЕЛЕЖКА-ЗАХВАТ ДЛЯ КАНТОВАНИЯ, ПЕРЕВОЗКИ И РАЗЛИВА ЖИДКОСТИ ИЗ ГОРИЗОНТАЛЬНОЙ БОЧКИ | 1989 |
|
RU2015050C1 |
| Подъемно-опускная секция рольганга | 1983 |
|
SU1113347A1 |
| ПРЕСС КРИВОШИПНЫЙ | 1998 |
|
RU2146197C1 |
| Механизм подач для делительных машин | 1954 |
|
SU102755A1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ ЗАМОК СТОЙКИ КОНИКА | 1970 |
|
SU273661A1 |
| УСТРОЙСТВО ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ КРЫШЕК РАЗГРУЗОЧНЫХ ЛЮКОВ ВАГОНА-ХОППЕРА | 2003 |
|
RU2251506C2 |


Л Д 3
Фиг. 5
t3 6
