4. Секция рольганга по личающаяся тем, п. 1, о т- чая поворотная вилка снабжена протичто двупле- вовесами. 1113347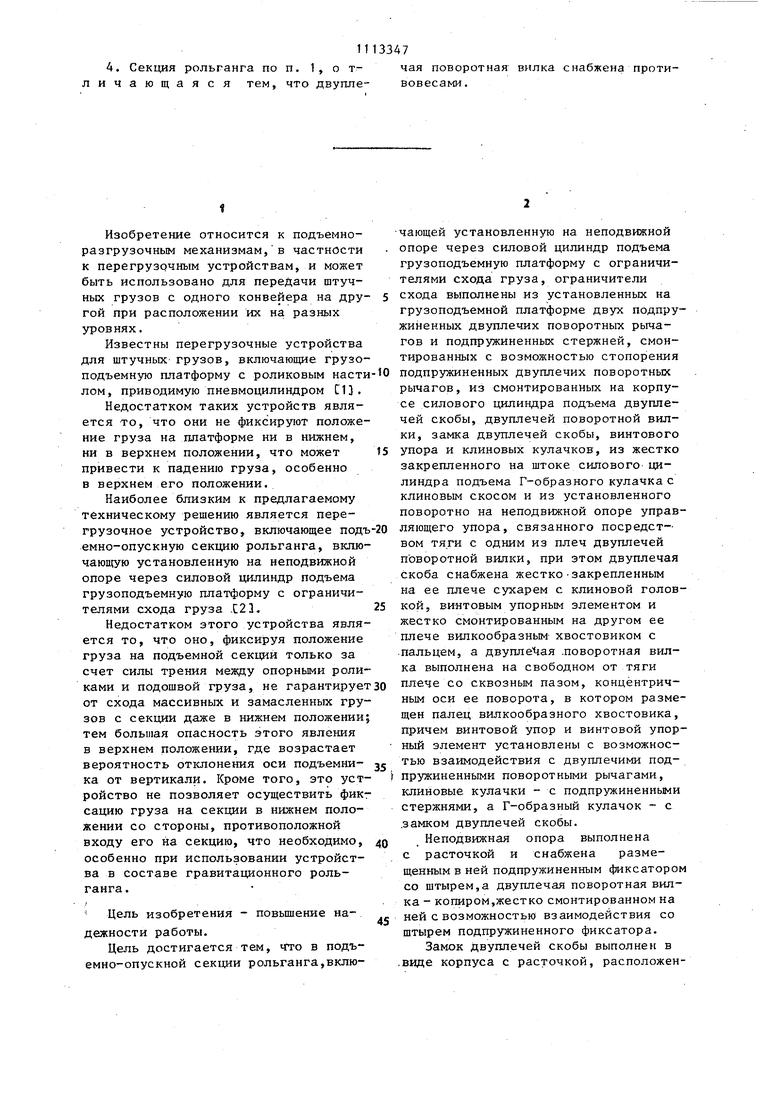

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СМЕНЫ ПОГЛОЩАЮЩЕГО АППАРАТА | 2008 |
|
RU2392138C2 |
| Транспортное средство для перевозки грузов | 1988 |
|
SU1579806A2 |
| Установка для изготовления пакетов экономайзеров | 1988 |
|
SU1590298A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| Зажимное устройство для опоки и подмодельной плиты | 1980 |
|
SU939163A1 |
| Трелевочная каретка подвесной канатной дороги | 1984 |
|
SU1296459A1 |
| Кузов транспортного средства для перевозки легковесных грузов | 1983 |
|
SU1142323A1 |
| Установка для контроля и маркировки маканых резиновых изделий | 1982 |
|
SU1126456A1 |
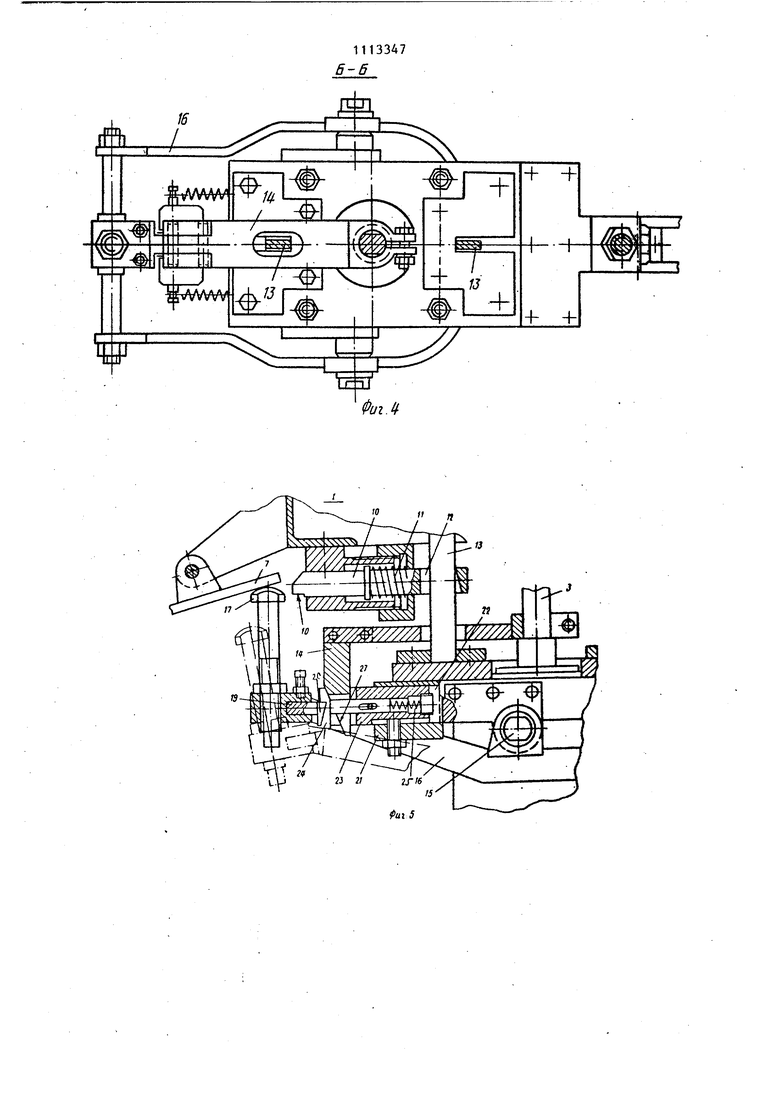
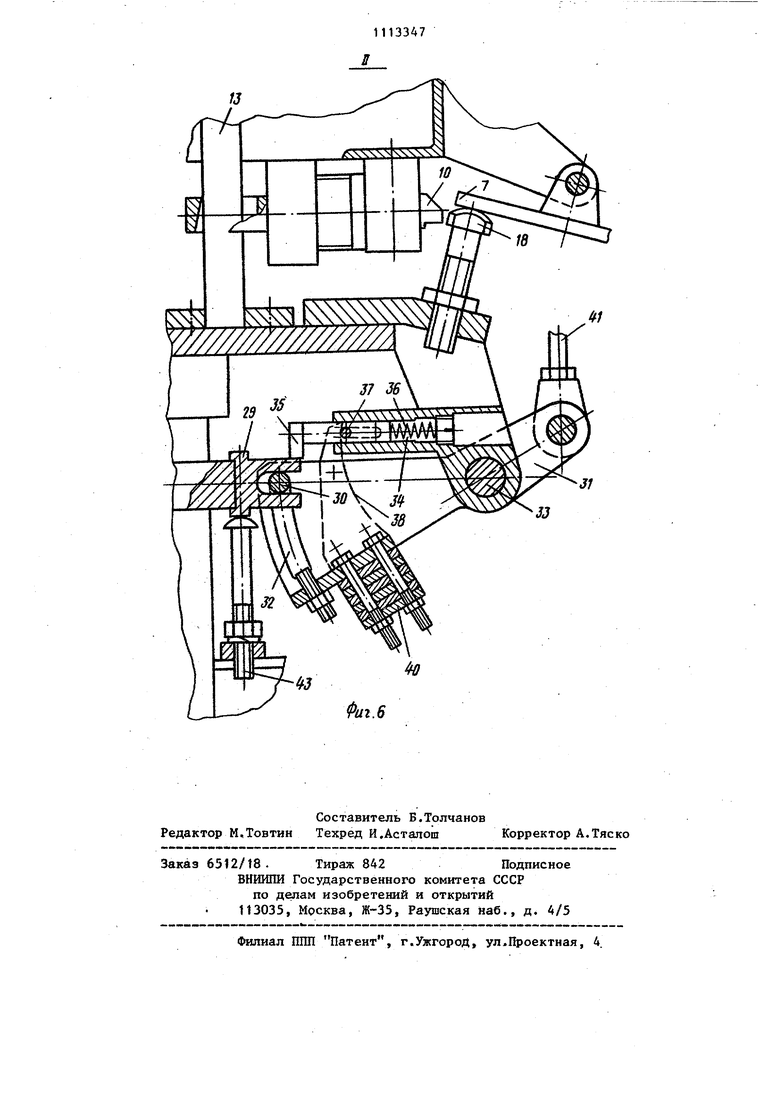
1 .ПOДЪE fl Q-OПУCKHAЯ СЕКЦИЯ РОЛЬГАНГА, включающая установленную на неподвижной опоре через силовой цилиндр подъема грузоподъемную платформу с ограничителями схода груза, отличающаяся тем, что, с целью повышения надежности работы, ограничители схода выполнены из установленных на грузоподъемной платформе двух подпружиненных двуплечих поворотных рычагов и подпружиненных стержней, смонтированных с возможностью стопорения подпружиненных двуплечих поворотных рычагов, из смонтированных на корпусе силового цилиндра подъема двуплечей скобы,двуплечей поворотной вилки, замка двуплечей скобы, винтового упора и клиновьк кулачков, .из жестко закрепленного на штоке силового цилиндра подъема Г-обраэного кулачка с клиновым скосом и из установленного поворотно на неподвижной опоре управляющего упора, связанного посредством тяги с одним из плеч двуплечей поворотной вилки, при этом двуплечая скоба снабжена жестко закрепленным на ее плече сухарем с клиновой головкой, винтовым упорным элементом и жестко смонтированным на другом ее плече вилкообразным хвостовиком с пальцем, а двуплечая поворотная вилка выполнена на свободном от тяги плече со сквозным пазом, концентричным оси ее поворота, в котором размещен палец вилкообразного хвостовика, причем винтовой упор и винтовой упорный элемент установлены с возможностью- взаимодействия с двуплечими подпружиненными поворотными г рычагами, клиновые кулачки - с подпружиненными стержнями, а Г-образный (Л кулачок - с замком двуплечей скобы. с 2.Секция рольганга по п. 1, отличающаяся тем, что неподg вижная опора выполнена с расточкой и снабжена размещенным в ней подпружиненным фиксатором со штырем, а двуплечая поворотная вилка - копиром, жестко смонтированном на ней с возможностью взаимодействия со штырем со подпружиненного фиксатора. со 3..Секция рольганга по п. 1, о тJlib личающаяся тем, что замок двуплечей скобы выполнен в виде корпуса с расточкой, расположенного в последней и подпружиненного к корпусу ползуна и клина, подпружиненного относительно последнего с возможностью взаимодействия с клиновой головкой сухаря, при этом ползун снабжен торцовой вилкой с клиновыми поверхностями, расположенными с возможностью взаимодействия с клиновым скосом Г-образного кулачка.
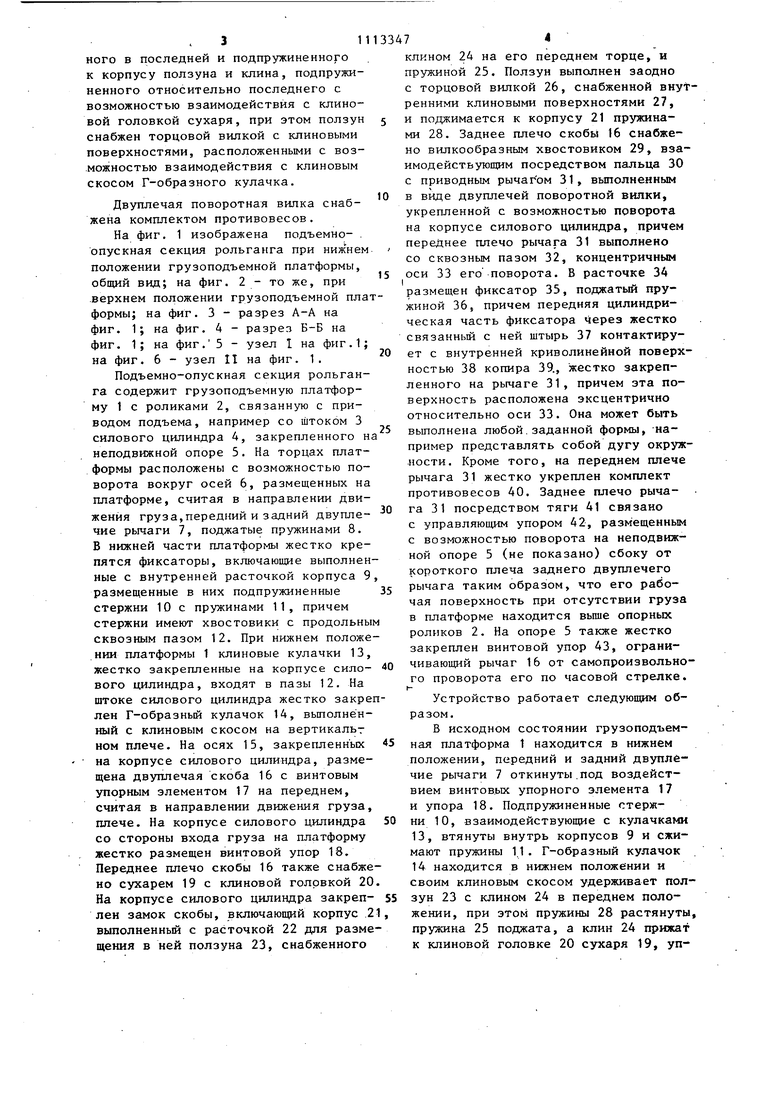
Изобретение относится к подъемноразгрузочным механизмам, в частности к перегрузочным устройствам, и может быть использовано для передачи штучных грузов с одного конвейера на дру гой при расположении их на разных уровнях. Известны перегрузочные устройства для штучных грузов, включающие грузоподъемную платформу с роликовым насти лом, приводимую пневмоцилиндром С13. Недостатком таких устройств является то, что они не фиксируют положение груза на платформе ни в нижнем, ни в верхнем положении, что может привести к падению груза, особенно в верхнем его положении. Наиболее близким к предлагаемому техническому решению является перегрузочное устройство, включающее подъ емно-опускную секцию рольганга, включающую установленную на неподвижной опоре через силовой цилиндр подъема грузоподъемную платформу с ограничителями схода груза 123, Недостатком этого устройства является то, что оно, фиксируя положение груза на подъемной секций только за счет силы трения между опорными роликами и подошвой груза, не гарантирует от схода массивных и замасленных грузов с секхщи даже в нижнем положении тем большая опасность этого явления в верхнем положении, где возрастает вероятность отюхонения оси подъемника от вертикали. Кроме того, это устройство не позволяет осуществить фиксацию груза на секции в нижнем положении со стороны, противоположной входу его на секцию, что необходимо, особенно при использовании устройства в составе гравитационного рольганга. Цель изобретения - повьш1ение надежности работы. Цель достигается тем, что в подъемно-опускной секхщи рольганга,включающей установленную на неподвижной опоре через силовой цилиндр подъема грузоподъемную платформу с ограничителями схода груза, ограничители схода выполнены из установленных на грузоподъемной платформе двух подпружиненных двуплечих поворотных рычагов и подпружиненных стержней, смонтированных с возможностью стопорения подпружиненных двуплечих поворотных рычагов, из смонтированных на корпусе силового цилиндра подъема двуплечей скобы, двуплечей поворотной вилки, замка двуплечей скобы, винтового упора и клиновых кулачков, из жестко закрепленного на штоке силового цилиндра подъема Г-образного кулачка с клиновым скосом и из установленного поворотно на неподвижной опоре управляющего упора, связанного посредст-вом тяги с одним из плеч двуплечей поворотной вилки, при этом двуплечая скоба снабжена жестко-закрепленным на ее плече сухарем с клиновой головкой, винтовым упорным элементом и жестко смонтированным на другом ее плече вилкообразным хвостовиком с пальцем, а двупле 1ая .поворотная вилка выполнена на свободном от тяги плече со сквозным пазом, концентричным оси ее поворота, в котором размещен палец вилкообразного хвостовика, причем винтовой упор и винтовой упорный элемент установлены с возможностью взаимодействия с двуплечими подпружиненными поворотными рычагами, клиновые кулачки - с подпружиненными стержнями, а Г-образный кулачок - с .замком двуплечей скобы. Неподвижная опора выполнена с расточкой и снабжена размещенным в ней подпружиненным фиксатором со штырем,а двуплечая поворотная вилка - копиром,жестко смонтированном на ней с возможностью взаимодействия со штырем подпружиненного фиксатора. Замок двуплечей скобы выполнен в виде корпуса с расточкой, расположенного в последней и подпружиненного к корпусу ползуна и клина, подпружиненного относительно последнего с возможностью взаимодействия с клиновой головкой сухаря, при этом ползун снабжен торцовой вилкой с клиновыми поверхностями, расположенными с воз-можностью взаимодействия с клиновым скосом Г-образного кулачка. Двуплечая поворотная вилка снабжена комплектом противовесов. На фиг. 1 изображена подъемно- . опускная секция рольганга при нижнем положении грузоподъемной платформы, общий вид; на фиг. 2 - то же, при .верхнем положении грузоподъемной пла формы; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1; на фиг. 5 - узел I на фиг.1; на фиг. 6 - узел II на фиг. 1. Подъемно-опускная секция рольганга содержит грузоподъемную платформу 1 с роликами 2, связанную с приводом подъема, например со штоком 3 силового цилиндра 4, закрепленного н неподвижной опоре 5. На торцах платформы расположены с возможностью поворота вокруг осей 6, размещенных на платформе, считая в направлении движения груза,передний и задний двуплечие рычаги 7, поджатые пружинами 8. В нижней части платформы жестко крепятся фиксаторы, включающие выполнен ные с внутренней расточкой корпуса 9 размещенные в них подпружиненные стержни 10 с пружинами 11, причем стержни имеют хвостовики с продольны сквозным пазом 12. При нижнем положе нии платформы 1 клиновые кулачки 13, жестко закрепленные на корпусе силового цилиндра, входят в пазы 12. На штоке силового цилиндра жестко закре лен Г-образный кулачок 14, вьшолнённый с клиновым скосом на вертикалы ном плече. На осях 15, закрепленных на корпусе силового цилиндра, размещена двуплечая скоба 16 с винтовым упорным элементом 17 на переднем, считая в направлении движения груза, плече. На корпусе силового цилиндра со стороны входа груза на платформу жестко размещен винтовой упор 18. Переднее плечо скобы 16 также снабже но сухарем 19 с клиновой головкой 20 На корпусе силового цилиндра закреплен замок скобы, включающий корпус .2 выполненный с расточкой 22 для разме щения в ней ползуна 23, снабженного клином 24 на его переднем торце, и пружиной 25. Ползун выполнен заодно с торцовой вилкой 26, снабженной внутренними клиновыми поверхностями 27, и поджимается к корпусу 21 пружинами 28. Заднее плечо скобы 16 снабжено вилкообразным хвостовиком 29, взаимодействующим посредством пальца 30 с приводным рычагом 31, выполненным в виде двуплечей поворотной вилки, укрепленной с возможностью поворота на корпусе силового цилиндра, причем переднее плечо рычага 31 выполнено со сквозным пазом 32, концентричным оси 33 его поворота. В расточке 34 размещен фиксатор 35, поджатый пружиной 36J причем передняя цилиндрическая часть фиксатора через жестко связанный с ней штырь 37 контактирует с внутренней криволинейной поверхностью 38 копира 39., жестко закрепленного на рычаге 31, причем эта поверхность расположена эксцентрично относительно оси 33. Она может быть выполнена любой.заданной формы, -например представлять собой дугу окружности. Кроме того, на переднем плече рычага 31 жестко укреплен комплект противовесов 40. Заднее плечо рычага 31 посредством тяги 41 связано с управляющим упором 42, размещенным с возможностью поворота на неподвижной опоре 5 (не показано) сбоку от короткого плеча заднего двуплечего рычага таким образом, что его рабочая поверхность при отсутствии груза в платформе находится выше опорных роликов 2. На опоре 5 также жестко закреплен винтовой упор 43, ограничивающий рычаг 16 от самопроизвольного проворота его по часовой стрелке. Устройство работает следующим образом. В исходном состоянии грузоподъемная платформа 1 находится в нижнем положении, передний и задний двуплечие рычаги 7 откинуты.под воздействием винтов.ых упорного элемента 17 и упора 18. Подпружиненные стержни 10, взаимодействующие с кулачками 13, втянуты внутрь корпусов 9 и сжимают пружины 11. Г-о5разный кулачок 14 находится в нижнем положении и своим клиновым скосом удерживает ползун 23 с клином 24 в переднем положении, при этом пружины 28 растянуты, пружина 25 поджата, а клин 24 прижат к клиновой головке 20 сухаря 19, управляющий упор 42 под воздействием противовесов 40 находится в верхнем положении, а фиксатор 35, снабженный пальцем 3, под воздействием пружины 36 - в переднем, при этом штырь 37 введен в контакт с криволинейной поверхностью 38 копира 39. В этом состоянии фиксатор 35 предотвращает поворот рычага 16 против часовой стрел ки. Во избежание поворота по часовой стрелке скоба 16 упирается в винтово упор 43. При поступлении груза на грузопод емную платформу 1 опорная поверхност груза нажимает на управляющий упор 42, который через тягу 41-передает усилие на заднее плечо приводного двуплечего рычага 31, в результате чего рычаг поворачивается по часовой стрелке. При эТом вначале палец 30 скользит по пазу 32, а копир 39 через штырь 37 отводит назад фиксатор 35, освобождая двуплечую скобу 16, после чего торец паза 32 воздействует на палец 30 и скоба 16 повора
чивается против часовой стрелки. При этом клиновая головка 20 сухаря 19 сдвигает клин 24 вправо, сжимая пружину 25. После того, как скоба 16 повернется на требуемый угол, задаваемый ходом управляющего упора 42 и длиной паза 32, сухарь 19 выходит из контакта с клином 24 и последний под действием пружины 25 возвращается в переднее положение, препятствуя обратному ходу двуплечей скобы 16. Одновременно с поворотом двуплечей скобы 16 поворачивается и закрепленный на ней винтовой упорный элемент 17, в результате чего передний упорный рычаг 7 под воздействием пружины 8 поворачивается вокруг оси 6 и занимает рабочее положение,запирая выход груза с платформы налево. При этом задний двуплечий рычаг 7 остает ся в откинутом положении. С началом работы силового цилиндра его штрк выдвигается виерх. При этом Г-образный кулачок 14, закрепленный на штоке, освобождает ползун 23, который вместе с клином 24 под воздействием пружин 28 движется вправо, освобожда скобу 16, которая с помощью противовесов 40 вместе с управляющим упором
платформы вначале клиновые кулачки 13, входя в пазы подпружиненных стержней 10, отводят их в заднее положение При дальнейшем ходе вниз двуплечие рычаги 7, упираясь в винтовые упорньй элемент 17 и упор 18, разводятся в стороны, преодолевая действие пружин 8, а Г-образный кулачок 14, входя в контакт с внутренней клиновой поверхностью торцовой вилки 26 ползуна 23, отводит последний вместе с клином 24 влево, растягивая пружины 28. В конце хода клин 24 упирается в клиновую головку 20 сухаря 19, закрепленного напереднем плече скобы 16. Далее система возвращается в исходное положение.
Использование изобретения позволит повысить технику безопасности труда рабочих, обслуживающих предложенное устройство, обеспечить фиксацию груза на грузоподъемной платформе секции, при загрузке ее в нижнем ;И верхнем положениях платформы и при подъеме и опускании груза. При движении груза по конвейеру справа налево подъемно-опускная секция позволит обеспечить возможность разгрузки секции в нижнем положении платформы. 42 возвращается в исходное положение. В то же время фиксатор 35 под воздействием пружины 36 постепенно выдвигается в переднее положение, по достижении которого запирает скобу 16. Одновременно задний рычаг 7, теряя контакт с винтовым упором 18, под воздействием пружины 8 поворачивается вокруг своей оси и ограничивает самопроизвольный выход груза с грузоподъемной платформы вправо. При движении грузоподъемной платформы вверх клиновые кулачки 13, жестко закрепленные на фланце силового цилиндра, выходят из пазов стрежней 10, перемещяющихся вместе с платформой. В результате этого стержни под воздействием пружин 11 перемещаются в переднее положение, при котором нижняя поверхность стержней 10 занимает положение над коротким плечом соответствующих рычагов 7, что обеспечивает дополнительное их стопорение, исключающее их самопроизвольное открывание при выходе из строя пружин В. При опускании
13
Г
Фиг.6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Лысяков А.Г | |||
| Вспомогательное оборудование для перемещения грузов | |||
| М | |||
| ., Машиностроение, 1977, с | |||
| Ребристый каток | 1922 |
|
SU121A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО | 0 |
|
SU267464A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
