равляемые инверторы 18 и 19, сумматоры 20 и 21 и датчики 22 и 23 направления вращения. Введенные.элементы позволяют обеспечить полную синхронизацию положений валов двух электроприводов 24 и 25 в режимах синхронного вращения, дифференциального вращения, заданного пространственно 1
Изобретение относится к электротехнике, а именно к устройствам, построенным на основе двух вентильных электроприводов, и может найти применение в системах синхронного вращения двух механически несвязанных валов в широком диапазоне изменения нагрузки на каждом валу.
Целью изобретения является упрощение двухдвигательного электропри- вода за счет уменьшения числа электрических связей между электродвигателями.
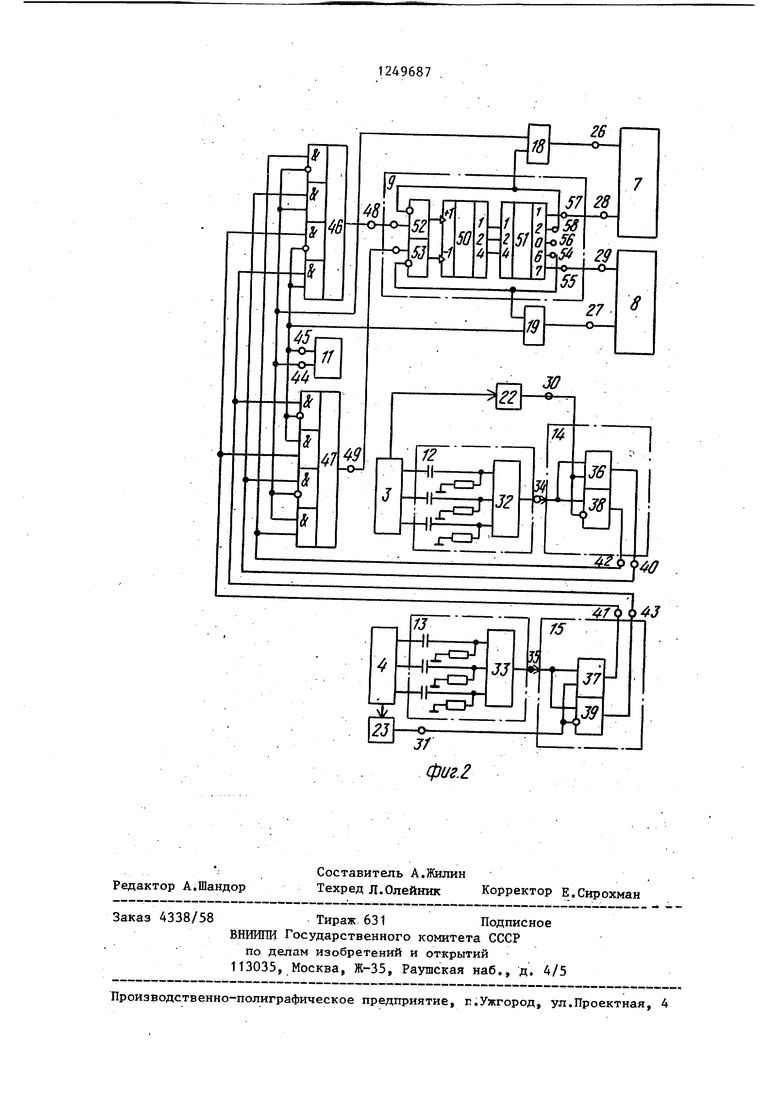
На фиг. 1 представлена.функцио- нальная схема двухдвигательного электропривода , на фиг. 2 - пример схемотехнической реализации ряда ,. узлов двухдвигательного электропривода, а именно формирователей импуль- сов, переключателей, сумматоров, счетного блока и управляемых инверторов.
Двухдвигательньй электропривод содержит первый 1 и второй 2 синхронные двигатели, на валу каждого из которых установлен датчик 3, 4 углового положения ротора, а обмотка статора каждого синхронного двигателя 1, 2 подключена к выходу соответствз ще- го преобразователя 5, 6 частоты, первый и второй блоки 7 и 8 выбора режим работы, каждьй из которых подключен первым входом к выходу соответствующе го датчика 3, 4 углового положения, а выходом - к управляющему входу соответствующего преобразователя 5, 6 частоты, счетный блок 9, снабженный .двумя входами и двумя выходами, не- точник 10 постоянного напряжения, подключенный к цепям питания преобразователи 5 и 6 частоты.
го опережения или отставания, динамического .торможения и остановки при минимальном числе связей между ЭД, что расширяет функциональные возможности ДДЭ, так как позволяет удалить ЗД друг от друга на значительные расстояния. 1 з.п. ф-льг, 2 ил.
В двухдвигательный электропривод введены задатчик 11 направления вращения двигателей с двумя выходами,
:первый 12 и второй 13 формирователи импульсов, первый 14 и второй 15 пере,ключатели, каждый из которых .снабжен информационным и управляющим входами и двумя вькодами, третий и четвертый переключатели 16 и 17, каждый из которых снабжен двумя информационными и управляющим входами и двумя выходами, первый 18 и второй 19 управляемые инверторы, каждый из. которых снабжен информационным и управляющим входами, первый 20 и второй 21 сумматоры, и первый и второй датчики 22 и 23 направления вращения, каждый из которых подключен входом к выходу соответствующего датчика 3, 4 углового положения ротора.
Выходы первого 22 и второго 23 датчиков направления вращения подключены к управляющим входам соответственно перв.ого 14 и второго 15 переключателей, информационные входы которых соответственно через первый 12 и втр- рой 13 формирователи импульсов подключены к выходам первого 3 и второго 4 датчиков углового положения ротора. Выходы первого 14 и второго 15 переключателей соединены с соответствующими информационными входами третьего 16 и четвертого 17 переключателей. Управляющий вход третьего, переключателя 16 объединен с управля- кнцим входом первого управляемого инвертора 18 и подключен к первому выходу задатчика 11 направления врэ- щения двигателей. Управляющий вход четвертого переключателя 17 объединен с управляющим входом второго управляемого инвертора 19 и подключен к второму выходу задатчика 11 направления вращения двигателей. Выходы третьего переключателя 16 подключены к первым входам первого 20 и второго 21 сумматоров, Выходы четвертого переключателя 17 подключены к вторым входам первого 20 и второго 21 сумматоров, подключенных выходами к входам счетного блока 9. Первый и второй выходы счетного блока 9 подключены соответственно к информационным входам первого 18 и второго 19 управляемых инверторов, подключ енных выходами к вторым входам и соответственно первого 7 и второго 8 блоков выбора режима работы.
Счетный блок 9 может быть снабжен двумя дополнительными выходами, подключенными к дополнительно введенным третьим входам соответственно первого 7 и второго 8 блоков выбора режима работы, ,
Синхронный двигатель с датчи- ком 3 углового положения ротора, преобразователем 5 частоты, блоком 7 выбора режима работы, формироватет лем 12 импульсов,-переключателями 14 и 16, з равляемым инверторЪм 18 и датчиком 22 направления вращения образуют по существу первый вентильный электропривод 24. .
Синхронный двигатель 2с датчи-. ком 4 углового положения ротора, преобразователем 6 частоты, блоком 8 выбора режима работы, формирователем 13 импульсов, переключателями 15 и 17, управляемым инвертором 19 и датчиком 23 направления вращения образуют по существу второй- вентильный электропривод 25,
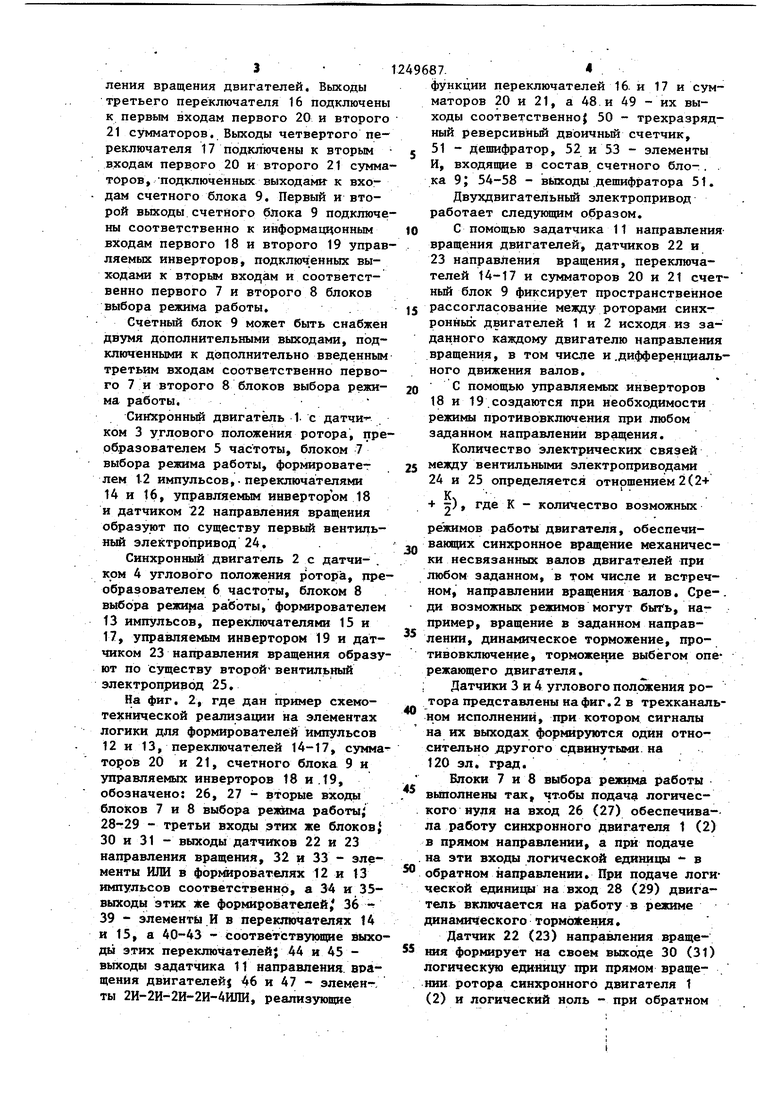
На фиг, 2, где дан пример схемотехнической реализации на элементах логики для формирователей импульсов 12 и 13, переключателей 14-17, сумматоров 20 и 21, счетного блока 9 и управляемых инверторов 18 и.Т9, обозначено: 26, 27 - вторые входы блоков 7 и 8 выбора рехоша работыj 28-29 - третьи входы этих же блоковf 30 и 31 - выходы датчиков 22 и 23 направления вращения, 32 и 33 - элементы ШШ в фop dIpoвaтeляx 12 и 13 импульсов соответственно, а 34 и 35- выходы этих же формирователей/ 36 - 39 - элементы И в переключателях 14 и 15, а 40-43 - соответствукицие выходы этих переключателей; 44 и 45 - выходы задатчика 11 направления, вращения двигателей} 46 и 47 - элемен-. ты 2И-2И-2И-2И-4ИПИ, реализующие
10
15
249687.
функции переключателей 16. и 17 и сумматоров 20 и 21, а 48 и 49 - их выходы соответственноJ 50 - трехразрядный реверсивный двоичный счетчик, 51 - дешифратор, 52 и 53 - элементы И, входящие в состав счетного бло- . . ка 9; 54-58 - выходы дешифратора 51.
Двухдвигательный электропривод работает следующим образом.
С помощью задатчика 11 направления вращения двигателей, датчиков 22 и
23направления вращения, переключателей 14-17 и сзгмматоров 20 и 21 счетный блок 9 фиксирует пространственное рассогласование между роторами синхронных двигателей 1 и 2 исходя из заданного каждому двигателю направления вращения, в том чисде и.дифференциального движения валов,
С помощью управляемых инверторов 18 и 19 создаются при необходимости режимы противовключения при любом заданном направлении вращения.
Количество электрических связей между вентильными электроприводами
24и 25 определяется отношением 2 (2+
К + т), где К - количество возможных
режимов работы двигателя, обеспечивающих синхронное враще1ше механически несвязанных валов двигателей при любом заданном, в том числе и встречном, направлении вргщения валов. Сре-. ди возможных режимов могут бы1 ь, например, вращение в заданном направлении, динамическое торможение, про20
25
30
35
тивовключение, торможен ие выбегом опережающего двигателя. . Датчики 3 и 4 углового положения ротора представлены на фиг. 2 в трехканаль- нрм исполнений, при котором сигналы на их выходах формируются один относительно .другого сдвинутыми, на 120 эл. град.
Блоки 7 и 8 выбора режима работы вьшолнены таК| чтобы подача логичес- кого нудя на вход 26 (27) обеспечива-- ла работу синхронного двигателя 1 (2) в прямом направлении, а при подаче . на эти входы логической единицы - в
обратном направлении. При подаче логической единицы на вход 28 (29) двигатель включается на работу в режиме динамич еского тормОАення,
Датчик 22 (23) направления вращения формирует на своем выходе 30 (31) логическую единицу при прямом вращении ротора синхронного двигателя 1 (2) и логический ноль - при обратном
вращении. Наличие в формирователе 12 (13) .импульсов трех RC-цепей и трех- входового элемента ИЛИ 32 (33) позволяет иметь на его выходе 34 (35) последовательность коротких импульсов, сдвинутьк друг относительно друга на временной интервал, соответствующий углу поворота ротора двигателя на 1.20 эл. град. Переключатель 14 (15) позволяет пропускать импульсы с выхода 34 (35) формирователя 12 (13) импульсов на вьтход 40 (41) при прямом вращении ротора двигателя 1 (2) и на выход 42 (43) - при обрат- ном вращении.
Задатчик 11 направления вращения двигателей формирует на своем выходе 44, соответствующем синхронному двигателю 1, сигнал логической едини цы, если задается его прямое вращение, и сигнал логического нуля, если задается обратное вращение. Аналогично формируются сигналы на выходе 45 относительно синхронного двигате- ля 2.
В элементах 46 и 47 вьтолняются следующие логические операции:
и,б «и,,oU..v u,,y-v и,д,.
и.. ,,,
где Uj,g и Ц,7 логические сигналы на выходе элементов 46 и 47 соответственно, и и Ujjs - логические сигналы на выходах задатчика 11 направления вращения двигателя, причем если задается вращение обоих двига - телей в прямом направлении U H,g 1 и при задании, вращения в .обратном направлении U 0; U, U(,i логические сигналы на выходе первых переключателей 14, 15 соответственно.
При этом пропускаются импульсы с выхода 34 формирователя 12 импуль- сов на выход 48 элемента 46 при совпадении заданного и реального направления вращения синхронного двигателя 1. При аналогичном совпадении для синхронного двигателя 2 пропускаются импульсы с выхода 35 формирователя 13 импульсов на выход 49 элемента 47. При несовпадении заданного и реального направлений вращения им-- пульсы от формирователя 12 импульсов поступают на выход 49, а импульсы от формирователя 13 импульсов - на выход 48.
5 10 15
0 5
0
5 о
0 5
Элементы И 52 и 53 в счетном бло- | ке 9 запрещают прохождение сигналов на свои выходы при подаче логической единицы на их инвертирующие входы. Счетный блок 9 (фиг. 2) имеет пять устойчивьпс состояний, которым соответствуют логические единицы на выходах 54-58 дёщифратора 51. Переход счетного блока 9 из состояния, при котором логическая единица присутствует на выходе 54, в состояние, при котором логическая единица присутству ет на выходе 55 (а также переход еди- НИ15.1 .с выхода 55 на 56, с 56 на 57, с 57 на 58), возможен при подаче импульсов на неинвертирующий вход элемента И 52. Переход счетного блока 9 из состояния, при котором логическая единица присутствует на выходе 58., в состояние, при котором логическая единица присутствует на выходе 57. (а также переход единицы с выхода 57 на 56, с 56 на 55, с. 55 на 54), возможен при подаче импульсов на неинвертирующий вход элемента И 53.
Своими инвертирующими входами элементы И 52 и 53 соединены с выходами ,58, 54 дешифратора 51. Элементы И 52 и 53 запрещают дальнейшее сложение импулЬсов, если счетный блок 9 находится в состоянии, при котор.ом логическая единица присутствует на выходе 58, и запрещает дальнейщее вычитание импульсов, при котором единица присутствует на выходе 54.
Управляемый инвертор 18 (19) работает инвертором сигналов от задатчика 11 направления вращения двигателей при отсутствии сигналов на его входе, поступающих с выхода 58 (54) дешифратора 51, и повторителем сигналов - при наличии указанных сигналов на его входе.
Наличие логической единицы на выходе 56 дешифратора 51 соответствует синфазному положению роторов двигателей 1 и 2, на выходе 57 - пространственному рассогласованию, при котором ротор двигателя 1 опережает ротор двигателя 2 на угол 120 эл. град., на выходе 58 - пространственному рассогласованию в 240 и более эл. град. При наличии единицы на выходах 54 и 55 ротор двигателя 2 опережает соответственно на 120 и 240 эл., град, ротор двигателя 1. При рассогласованиях, меньших 120 эл. град., сигналы
/
на выходах 56 и 57 при опережающем двигателе 1 или на выходах 56 и 55 при опережающем двигателе 2 чередуются со скважностью сигнала на выходе 56, пропорциональной углу пространственного рассогласования/Так как выход 56 не соединен ни с каким входом управляемых инверторов 18, 19 или блоков 7, 8 выбора режима работы, то при синфазной работе не поступает сигналов на торможение и каждьй работает в том режиме, какой ему задается управляемым инвертором 18, 19.
При рассогласованиях, не больщих 120 эл. град,, появляется сигнал на выходе 57 или выходе 55, которые соединены с входами 28 и 29 блоков 7 и 8 выбора режима работы, обеспечивающими режим динамического торможения. При рассогласованиях, больших 120 эл, град,, на выходах 58 и 54 появляются сигналы, поступающие на информационньй вход управляемого инвертора 18, 19, который в этом случае повторяет на своем выходе сигнал, поступающий от задатчика 11 направления вращения, и опережающий двигатель тормозится в режиме противовклю- чёния.
При пуске из начального пространственного рассогласования, большего 120 эл, град,, отстающему, например, двигателю 1 формируется сигнал от задатчика 11 направления вращения через управляемый инвертор 18 на работу в заданном направлении вращения. При этом отсутствуют сигналы на выходах счетного блока 9, соединенных с блоком 7 выбора режима работы, т,е, на выходах 57 и 58, и управляемьй инвертор 18 работает инвертором сигналов указанного задатчика.
Опережающему двигателю 2 для ускорения уменьшения рассогласования формируется сигнал на вращение в противоположном от заданного направления, так как счетный блок 9 формирует единицу на выходе 54, При этом управляемому инвертору 19 формируется сигнал на повторение сигналов от задатчика 11, Двигатели начинают встречное движение, угловое рассогласование уменьшается В этом случае появляются импульсы на выходе 48 элемента 46, так как элемент 47 фиксирует несоответствие заданного и реального направлений вращения. В счетном блоке 9 появляется единица на выходе 56, чем фиксируется синфазное положе496878
ние роторов, в дальнейшем происходит согласованный пуск,Согласованное положение роторов двигателей поддерживается также и
с при остановке электропривода. Если ротор одного из двигателей затормо жен, например первого, а ротор второго под действием сил сопротивления начал вращение, например, в прямом
to направлений, то появятся импульсы на выходе 41 переключателя 15. При этом, если на выходе 45 задатчика 11 направления вращения - логическая единица, то импульсы появятся
J5 на выходе 49 элемента 47, Поступив на вь1читающий вход реверсивного счетчика 50, импульсы переведут счетньй блок в состояние с единицей на выходе 54. При этом на оба входа управ20 ляемого инвертора 19 придут логические единицы и указанный инвертор сформирует на выходе логическую единицу, которая, поступив на вход 27 блока 8 выбора режима работы, обеспе25 чит вращение в обратной направлении, т,е. движение к исходному положению.
Если при прежних.прочих условиях на выходе 45 задатчика 11 направления вращения - логический нуль, то им- пульсы от элемента ИЛИ 33 появятся на выходе 48 элемента.46, Поступив на суммирующий вход реверсивного счетчика 50, они переведут счетный блок 9. в состояние- с единицей на выходе 58, При этом на обоих входах управляемо го инвертора 19 будут логические нули и указанный инвертор, являясь логической схемой РАВНОЗНАЧНОСТЬ, сформирует на своем выходе также логическую единицу. Как и в предьщущем слу30
5
0
чае,- это приведет к включению электродвигателя на движение в направлении, уменьшающем пространственное . рассогласование,
Таким образом, введение в двух- . двигательньм электропривод задатчика направления вращения двигателей, фор- мирователей импульсов, переключателей, управляемых инверторов и сумматоров позволяет обеспечить синхронную работу двигателей в любом заданном направлении вращения, при этом за счет сокращения числа связей меж- :ду вентильными электроприводами в сравнении с известным рещением расши5 ряются их функциональные возможности, так как двигатели могут быть удалены друг от друга на значительные расстояния ,
Формула изобретения
1. Двухдвигательный электропривод, содержащий первый и втррой синхронные двигатели, на валу каждого Из которых установлен датчик углового положения ротора, ,а обмотка статора каждого синхронного двигателя подключена к выходу соответствукицего преобразователя частоты, первый и второй блоки выбора режима работы, каждый из которых подключен первым входом к выходу соответствующего датчика углового положения ротора, а выходом - к управляющему входу соответствующего преобразователя частоты, счетн блок с двумя входами и двумя выходами, источник постоянного напр гасения, под- ключенньй к цепям питания преобразователей частоты, отличающий- с я тем, что, с целью, упрощения за счет Уменьщения числа электрических связей между электродвигателями, вве дены задатчик направления вращения двигат елей с двумя выходами, первый и в;торой формирователи импульсов,пер- вый и второй переключатели, каждый из которых снабжен информационным, и управляющим входами и двумя выходами, третий и четвертый переключатели, : каждый из которых снабжен двумя информационными и управляющими входами и двумя выходами, первый и второй уп- : равляемь)е инверторы, каждый из которых снабжен информационным и управляющим входами, первый и второй сумматоры и первый и второй датчики направления вращения, каждый из которых подключен входом к вьпсоду соответствующего датчика углового положения ротора, при этом выходы первого и второго датчиков направления вращения
0
5
0
5
0
5
подключены К управляющим входам соответственно первого и второго пере- ключг:телей, информационные входы которых соответственно через первый и второй, формирователи импульсов подключены к выходам первого и второго датчиков углового положения ротора, -вькоды первого и второго переключателей соединены с соответствующими информационными входами третьего и четвертого переключателей, управляющий вход третьего переключателя объединен с управляющим входом первого управляемого инвертора и подключен к первому выходу задатчика направления вращения двигателя, управляющий вход четвертого переключателя объединен с управляющим входом второго управляемого инвертора и подключен к второму, выходу задатчика . направления вращения двигателей, выходы третьего переключателя подключены- к первым вход ампервого и второго сумматоров, выходы четвертого переключателя подключены к вторым входам первого и второго сумматоров, подключенных выходами .к входам счетного блока, первый и второй выходы счетного блока подключены соответственно . к информационным входам первого и второго управляемых инверторов, подключённых выходами к вторым входам соответственно первого и второго блоков выбора режима работы.
2. Электропривод по п. 1, отличающийся тем, что счетный блок снабжен двумя дополн11тельными выходами, подключенными к дополни- тельно введенным третьим входам соответственно первого и второго блоков выбора режима работы.
Редактор А.Шандор
Составитель А.Жилин
Техред Л.ОлеЙник Корректор Е.Сирохман
Заказ 4338/58Тираж 631Подписное
ВНИИЩ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4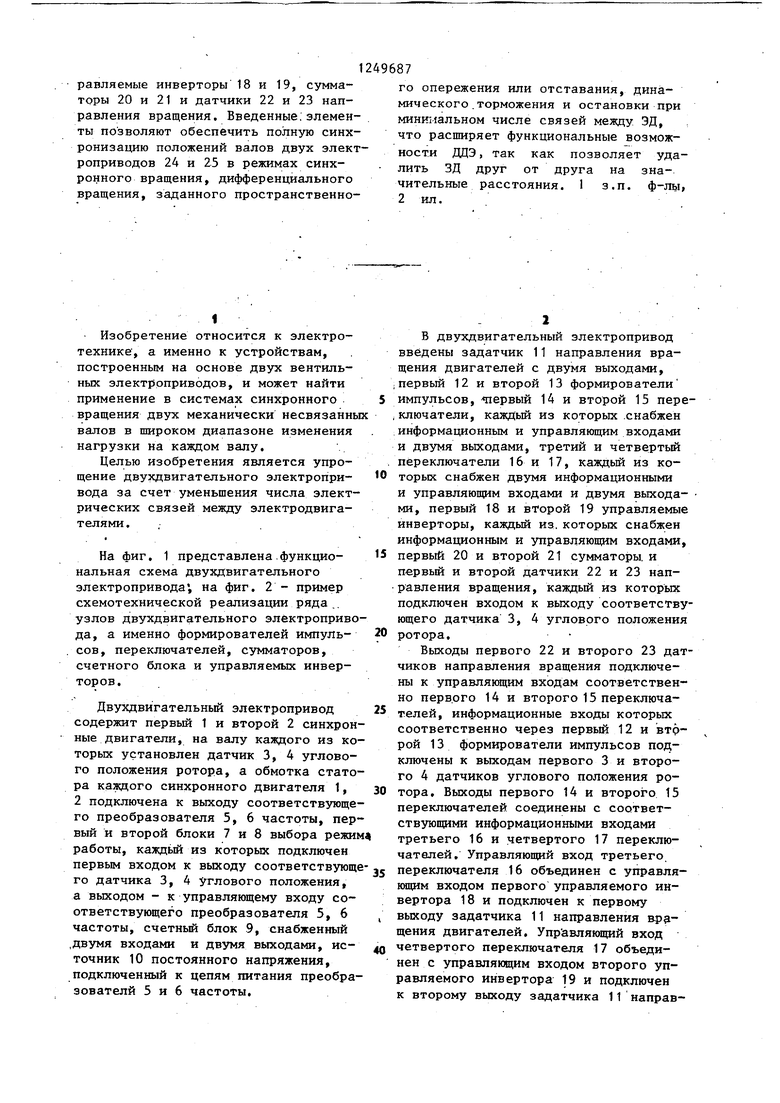
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2020724C1 |
| Бесконтактный двигатель постоянного тока | 1987 |
|
SU1582323A1 |
| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| Устройство для управления реверсивным вентильным электродвигателем | 1982 |
|
SU1064412A2 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1330725A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1981 |
|
SU1001415A1 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
Изобретение относится к электротехнике и может применяться в систег- мах синхронного вращения двух механически несвязанных вгшов. Цель изобретения - упрощение двухдвигательно- го электропривода (ДЦЭ). ДЦЭ содержит синхронные двигатели 1 и 2, датчики 3 и 4 углового положения их роторов, преобразователи 5 и 6 частоты, блоки 7, 8 выбора режима, счетный блок 9, источник 10 постоянного напряжения. В ДЦЭ введены эадатчик 11 направления вращения электродвигателя (ЭД), формирователи 12 и 13 . импульсов, переключатели 14-17, уп- , 4: о р 00 

| Многодвигательный электропривод | 1978 |
|
SU942232A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ивоботенко Б.А., Лозенко В.К | |||
| Перспектива применения магнитоэлектрических вентильных двигателей в мно- годвигательном электроприводе | |||
| Труды МЭИ,- 1979, вьт | |||
| Приспособление для автоматического тартания | 1922 |
|
SU416A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
