11
Изобретение относится к приборостроению и средствам автоматики и может быть использовано для улучшения характеристик следяпшх систем, систем стабилизации и программного управления.
Цель изобретения - повышение динамических свокств устройства.
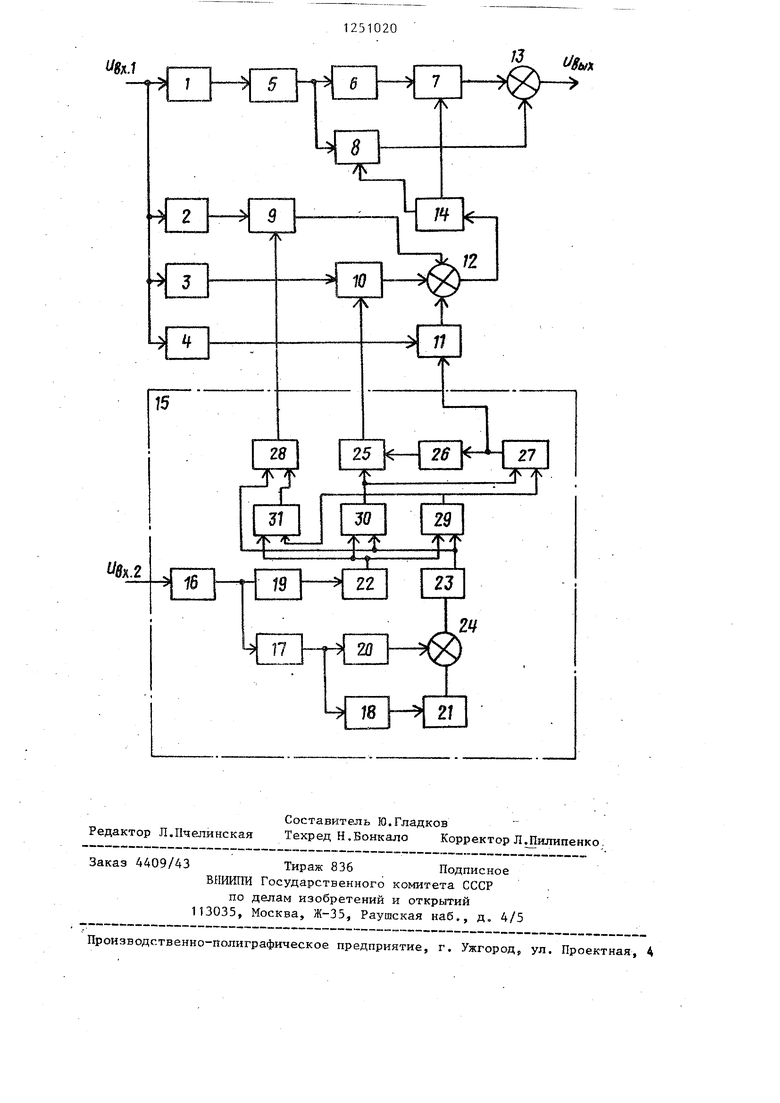
На чертеже приведена структурная схема устройства.
Устройство содержит первый 1,второй 2, третий 3 и четвертый i фильтры, блок 5 выделения модуля, первый 7 и второй 8 элементы И, первый 9, второй 10 и третий 11 ключи, сумматор 12j выход 13 устройства, блок 14 сигнатуры и блок 15 управления, образованный первым 16 и вторым 17 дифференциаторами, линейным фильтром 18, вторым 19, третьим 20 и первым 21 детекторами, вторым 22 и первым 23 элементами сигнатуры, суммирующим элементом 24, вторым элементом И 25, элементом НЕ 26,первым 27 и третьим 28 элементами И, первым элементом ИЛИ 29, элементом И-НЕ 30 и вторым элементом ИЛИ 31. На чертеже приняты обозначения: 1/, , ехг первый и второй входные сигналы устройства; Ugbix выходной сигнал устройства.
В качестве детекторов 19-21 применяются линейные детекторы, которы осуществляют выделения модуля сигнала. В качестве фильтров 1-4 могут примениться линейные фильтры.Фильтры 1 и 18 имеют фазозапаздывающие а фильтры 2-4 - фазоопережающие характеристики.
Параметры фильтра 2 выбраны из условия обеспечения требуемых показателей качества для гармонического входного сигнала, параметры фильтра 3 - для ступенчатого входного сигнала, параметры 4 - для линейно изменяющегося входного сигнала.
Элемент И 7 срабатывает при подаче положительного управляющего сигнала, а элемент И 8 - отрицательного.
Устройство работает следующим
образом. I
В блоке 15 управления входной сигнал анализируется. В соответствии с его типом подается управляющий сигнал на соответствующий ключ 9 (10 или 11), который подклю чает к основной схеме корректиру01
ющсго устройства лтпшйный фильтр 2 (3 RHH 4), настроенный ня соответст- вуюигий входной с:игнал. Анализ входных сигналов основан на отличиях
их первых и вторых производных.
Клок 15 управления при поступлении на второй вход устройства ступенчатого сигнала работает следующим образом.
На выходе дифференциаторов 16
и 17 сигнал равен нулю, следовательно на выходе элементов 22 и 23 сигнатуры сигнал соответствует О. На выходе элемента ИЛИ 29 присутствует
нулевой, на выходе элемента ИЛИ 31 - также нулевой, а на выходе элемента И-НЕ 30 - единичный сигнал. На выходе элемента И 28 находится нулевой сигнал, а на выходе элемента
И 27 - нулевой, который после элемента НЕ 26 становится единичным. Следовательно, на двух входах элемента И 25 имеется единичный сигнал, а на выходе единичный сигнал
вызывает срабатывание ключа 10. Последний, в свою очередь, подключает фильтр 3, настроенный на отработку ступенчатого сигнала, к входу сумматора 12.
При линейно изменяющемся входном сигнале на выходе дифференциатора 17 присутствует нулевой сигнал, так как на выходе дифференциатора 16 имеется сигнал с постоянной амплитудой, пропорциональный скорости изменения входного сигнала. Сигнал после дифференциатора 16, пройдя через детектор 19 и элемент 22 сигнатуры, становится равным сигналу, который соответствует 1. На выходе элемента 23 сигнатуры сигнал соответствует О. Тогда на выходе элемента И 27, т.е, на третьем выходе блока 15 управления, имеется сигнал,
который вызывает замыкание ключа 11, подключающего фильтр 4, настроенный на отработку линейно изменяющегося входного сигнала,к входу сумматора 12i
50
При гармоническом входном сигнале на выходах дифференциаторов 16 и 17 имеются сигналы, следовательно на выходах элементов 22 и 2 сигнатуры сигналы соответствуют 1. Тогда на выходе только элемента 55 И 28, т.е. на первом вьиоде блока 15 управления, имеется сигнал, который вызывает замыкание ключа 9, подключающего фильтр 2, настроенный на от.11251020
аботку гармонического входного сигала, к входу сумматора 12. Летектор 0, линейный фильтр 18, детектор 21, уммируюпщй элемент 24 и элемент ЛИ 31 предназначены для устранения ожных переключений при переходе чеез нуль входного гармонического сигала .
с ве кл к ра ро со тр ч ра со ци де вы ме НЕ вт во Ивыи И, да ИЛ ту вт ди те ди вх ро кл ИЛ ть фе ро ся вт ра
Таким образом, в устройстве про- изводится идентификация типа входного сигнала и подключается фильтр, настроенный на этот сигнал. Тем самым, в три раза повышаются динамические свойства псевдолинейного кор- ректирующего устройства при наличии различных типов управляющих сигналов в системах автоматического управления.
Формула изобретения
1. Псевдолинейное корректирующее устройство по авт.св. № 387332, отличающееся тем, что, с целью повышения динамических свойств устройства, в нем дополнительно установлены третий и четвертый фильтры,блок выделения модуля,суматор, первый, второй и третий ключи блок управления, причем выход первого фильтра соединен с входом инвертора и вторым входом второго элемента И через блок вь(деления модуля, выход второго фильтра подключен к входу блока сигнатуры через последовательно соединенные первый ключ и сумматор, входы третьего и четвертого фильтров подключены ко входу первого фильтра, а их выходы соединены
to15
20
25
00
5
с информационными входами соответственно второго и третьего ключей, подключенных выходами соответственно к второму и третьему входам сумматора , управляющие входы первого, второго и третьего ключей соединены соответственно с первым, вторым и третьим выводами блока управления, 2. Устройство по п. 1, отличающееся тем, что блок управления содержит последовательно соединенные первый и второй дифференциаторы, линейный фильтр, первый детектор, суммирующий элемент, первый элемент сигнатуры, первый элемент ИЛИ, первый элемент И, элемент НЕ и второй элемент И, подключенный вторым входом к второму входу первого элемента И и выходу элемента ИНЕ, соединенного первым входом с выходом первого элемента сигнатуры и первым входом третьего элемента И, а вторым входом - с вторыми входами первого и второго элементов ИЛИ и выходом второго элемента сигнатуры, подключенного входом через второй детектор к выходу первого дифференциатора, вход третьего детектора соединен с выходом второго дифференциатора, а выход - с вторым входом суммирующего элемента, второй вход второго элемента ИЛИ подключен к выходу первого элемента ИЛИ, а выход - к второму входу третьего элемента И, вход первого диф- ферен1р1атора, выходь третьего, вто рого и первого элементов И являются соответственно входом, первым, вторым и третьим выходами блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство с фазовым опережением | 1988 |
|
SU1718182A1 |
| ПСЕВДОЛИНЕЙНОЕ ЛОГИЧЕСКОЕ УСТРОЙСТВО | 1972 |
|
SU334549A1 |
| Устройство для фильтрации высокочастотных отклонений натяжения полосы на прокатном стане | 1981 |
|
SU973204A1 |
| Псевдолинейное корректирующее устройство для систем управления | 1982 |
|
SU1076870A1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1987 |
|
SU1841021A1 |
| Устройство для компенсации эксцентриситета прокатных валков | 1981 |
|
SU990357A1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| Псевдолинейное корректирующее устройство | 1982 |
|
SU1103197A1 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Устройство для быстродействующей защиты сети постоянного тока от коротких замыканий | 1989 |
|
SU1781763A1 |
Изобретение относится к области приборостроения и средств автоматики. Оно может быть использовано для коррекции характеристик следящих систем, систем стабилизации и программного управления и является усовершенствованием известного устройства по авт.св. № 387332. В нем осуществляется анализ входных воздействий и изменение структуры цепей коррекции в зависимости от типа входного воздействия. Первый входной сигнал устройства поступает через первьй фильтр, блок выделения модуля, инвертор, первый элемент И на суммирующий выходной блок устройства, на второй вход которого через второй элемент И поступает сигнал с выхода блока выделения модуля. Кроме того, первый входной сигнал через три параллельные цепи, состоящие каждая из фильтра и ключа, поступает на входы сумматора. Выходной сигнал последнего через блок сигнатуры воздействует на входы первого и второго элементов И, работающих в ключевом режиме. Второй входной сигнал корректирующего устройства поступает на вход блока управления, в котором определяется его тип. В зави симости от типа входного сигнала блок управления формирует управляющий сигнал на замыкание одного из ключей. Блок управления может, например со держать последовательно соединенные первый и второй дифференциаторы, линейный фильтр, первый детектор, суммирующий элемент, первый элемент ИЛИ, первый элемент И, элемент НЕ и второй элемент И, подключенный вторым входом к второму входу первого элемента И и tg выходу элемента И-НЕ, соединенного первым входом с выходом первого элемента сигнатуры и первым входом третьего элемента И, а вторым входом - с вторыми входами первого и второго элементов ИЛИ и выходом второго элемента сигнатуры, подключенного входом через второй детектор к выходу первого дифференш атора. Вход третьего детектора соединен с выходом второго дифференциатора, а вьпсод - с вторым входом суммирующего элемента. Второй вход второго элемента ИЛИ подключен к выходу первого элемента ИЛИ, а выход - к второму входу Третьего элемента И. Вход первого дифференциатора, выходы третьего, второго и первого элементов И являются соответственно входом, первым, вторым и третьим выходами блока уп- .равления. 1з.п.ф-лы, 1 ил. (Л
Ц 17
24
20
| У\БТОр | 0 |
|
SU363069A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| ПСЕВДОЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 0 |
|
SU387332A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
