12
Изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе асинхронного двигателя с фаз1гым ротором, и может быть использовано в механизмах; требуюи1их высоких динамических свойств и повьшенной надежности, например, в горно-металлургической промышленности, при регулировании числа оборотов ротора относительно синхронной скорости питающего поля.
Целью изобретения является повышение стабильности частоты вращения при аварийнь х бросках входного силового тока преобразователя частоты с непосредственной связью.
На фиг,1 представлена функциональная схема электропривода переменного тока; на фиг.2 схема выполнения индикатора рассогласования.
Электропривод переменного тока содержит асинхронный двигатель (фиг.1) с фазным ротором, подключенным через датчик 2 тока ротора к выходам пр2- образователя частоты с непосредственной связью 3, формирователь А сигналов задания активного -и реактивного токов ротора с двумя информационным - : входами 5, 6, первым и вторым зкода- г-да обратной связи 7;, 8 и первым к вторым выходами 9, 0, подключенными к упр,5вляюгдан входам блока прямог-о преобразования координат 11, фазовый дискриминатор 12 с первым, вторым .и третьим входа1 И 13, 14 и 15, ватель гармонических функций 6, вход которого объединен с вторьм вяо- дом обратной связи 8 форм1 грователк 4 сигналов задания активного к реактивного токов ротора и подключен к выходу фазового диcкpи етнaтopa 12,, а выходы формирователя гармонических функдий 6 подключены к опорным входам блока прямого преобразования координат И; регулятор 17 тока ротора подключенный пергзьп входом к вьгкоду блока прямого преобразования координат 11 , вторым входом - к выходу датчика 2 тока ротора, а выходом -- к управляющему входу 18 преобразователя частоты с непосредственной связью .3, датчики 19 и 20 тока и напряжения статора, подключенные выходаьда к соответствующим информадионз№ м входам 5, б формировател.я 4 сигналов задания активного и реактивного токов ротора и к входам блока обратного пра- образопания координат 21 , первый ЕЬ:l2812
ход которого подключен к первому входу обратной связи 7 формирователя 4 сигнатюв задания активного и реактивного токов ротора, а второй и
третий выходы блока обратного преобразования координат 21 подключены соответственно к втором и третьему входам 14 и 15 фазового дискриминатора 12, соединенного первым входом
0 13 с вторым выходом 10 формирователя 4 сигналов задания активного и реактивного токов ротора.
Фазовый дискриминатор 12 (фиг.1) выполнен из регулятора частоты скольS жения 22, блока деления 23 и злемен- та сравнения 24, выход которого подключен к входу для делимого блока деления 23, причем первый и второй входдз элемента сравнения 24 и вход
О для делителя блока деления 23 образуют соответственно первый, второй и третий входы 13, 14 и 15 фазового дискриминатора 12, а выход регулятора ч,:;: ; оты скольжения 22 образует выход фазового дискриминатора 12.
г
В электропривод, переменного тока введены датчик 25 входного силового тока преобразователя частоты с непосредственной связью 3, индикатор рассогласования 26 с двумя входаг-ш и управляемый ключ 27. Преобразователь частоты с непосредственной связь 3 снабжен дополнительным входом 28 перевода в инверторкг-ж режим, ко- торый объединен с управляющим входом управляемого ключа 27 и подключен к выходу индикатора рассогласования 26, при этом выводы управляемого ключа 27 подключены соответственно к выходу блока деления 23 и входу регулятора частоты скольжения 22, а выходы датчика 2 тока ротора и датчика 25 входного силового тока преобразователя частоты с непосредственной
,1
- СВЯЗЬЮ 3 подключены к входам индикатора рассогласования 26.
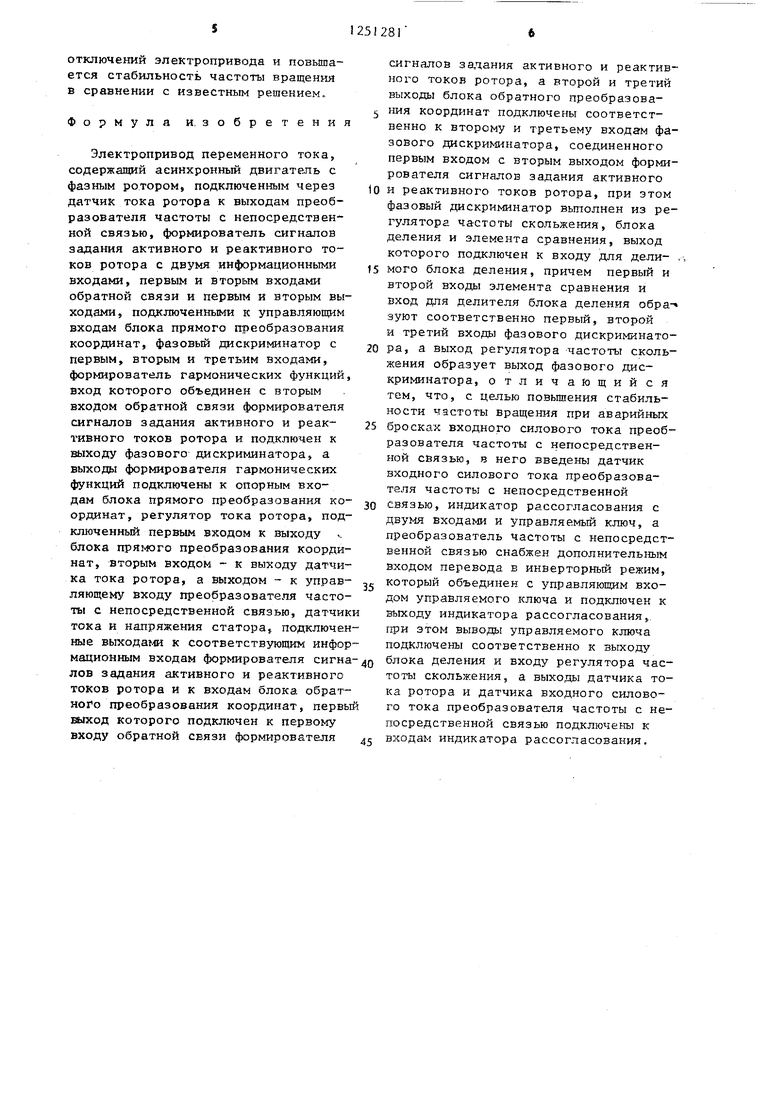
Индикатор рассогласования 26 содержит выпря1«1тели 29s 30 и 31 (фиг.2) фазных токов ротора вьтрямители 32,
50 33 и 34 тзкодныг. силовых токов преоб-- разоватагш частоты с непосредственной связью, индикаторы уровней TOKOS 35, 36 к 37J источник порогового смещения 38 и элемент ИЛИ 39, вхо55 ды которого подключены к выходам индикаторов уровней токов 35,, 36 и 37. Псрвь е Bxopjii индикаторе уровней токов 33, 36 и 37 подключены соответ0
3
ственно к выходам выпрямителей 29, 30 и 31 фазных токов ротора, вторые входы - к выходам выпрямителей 32, 33 и 34 входных силовых токов преобразователя частоты с непосредствен- ной связью, а третьи входы объединены между собой и подключены к выходу источника порогового смещения 38.
Электропривод переменного тока работает следующим образом.
Асинхронный двигатель 1 с фазным ротором питается со стороны статора от промышленной сети, а со стороны ротора - от преобразователя частоты с непосредственной связью 3. Регуляу тор 17 тока ротора обеспечивает соответствие фазных токов ротора сигналам задания, поступающим с выхода блока прямого преобразования координат 11, благодаря больщому коэффи- циенту усиления в контурах регулирования. При этом преобразователь частоты с непосредственной связью 3 работает в режиме источника тока.
На управляющие входы блока прямо- го преобразования координат 11 поступают сигналы задания реактивного i и активног о i а токов ротора, а на опорные входы - сигналы sinjjt, cosftt, где Ki - частота скольжения, определяемая регулятором частоты скольжения 22.
Сигнал задания активного тока ротора i сравнивается с сигналом lapm поступающим с выхода блока обратного преобразования координат 21. Результат сравнения (на выходе элемента сравнения 24) используется в качестве делимого в блоке деления 23, а делителем является сигнал I рр,, .Фор- мирование сигналов lapom изводится по выходным сигналам датчиков тока 19 и напряжения 20 статора. Выходной сигнал блока деления 23 пропорционален углу рассогласования меж ду заданным и измеренным векторами тока ротора. Выходной сигнал регулятора частоты скольжения 22 используется также в качестве сигнала обратной связи по скорости (на входе 8 формирователя 4 сигналов задания активного и реактивного токов ротора) .
Регулирование скорости вращения, частоты скольжения и активной состав ляющей тока ротора производится по одному каналу, а регулирование реактивной мощности - по другому ка81 ,4
налу, что обеспечивает высокие динамические свойства электропривода переменного тока. При сбое логики управления преобразователя частоты с непосредственной связью 3 его вхоД- нои силовой ток, измеряемый с помощью датчика 25, становится больше его выходного тока, измеряемого с помощью датчика 2. Указанное несоответствие токов фиксируется индикатором рассогласования 26. Здесь выпрямленные значения указанных токов пофаз- но анализируются соотйетствующими индикаторами уровней токов 35, 36, 37 и сравниваются с выходным сигналом источника порогового смещения 38, При превьщ1ении тсазанного порога на выходе элемента ИЛИ 39 (на выходе индикатора рассогласования 26) появляется сигнал, поступающий на вход 28 преобразователя частоты с непосредственной связью, обеспечивая его перевод в предельный инверторный режим, благодаря чему его работа нормализуется и отключение силового питания не требуется. Время этой нормализации не превышает по длительности одного периода частоты питающей сети, т.е. 0 мс при 50 Гц. Выходной сигнал индикатора рассогласования 26 воздействует также на управляющий ключ 27, размыкающий входную цепь регулятора частоты скольжения 22. Так как время указанного переключения невелико, то сигналы i. ,
.a , К за. зто время существенно не изменяются.
При восстановлении равенства входного и выходного токов преобразователя частоты с непосредственной связью 3 электропривод переменного тока возвращается к нормальному функционированию, причем этот возврат происходит без существенйых бросков
тока.
Таким образом, введение в электропривод переменного тока датчика входного силового тока преобразователя частоты с непосредственной связью, индикатора рассогласования и управляемого ключа позволяет обеспечить на короткое время перевод преобразователя частоты с непосредственной связью в инверторный режим при аварийных бросках входного силового тока и его возврат к нормальному функционированию, благодаря чему исключается необходимость аварийных
отключений электропривода и повышается стабильность частоты вращения в сравнении с известным решением.
Формула и. зобретения
Электропривод переменного тока, содержащий асинхронный двигатель с фазным роторомJ подключеншз1м через датчик тока ротора к выходам преобразователя частоты с непосредствен ной связью, формирователь сигналов задания активного и реактивного токов ротора с двумя информационными входами, первым и вторым входами обратной связи и первым и вторым выходами, подключенными к управляющим входам блока прямого преобразования координат, фазовый дискриминатор с первым, вторым и третьим входами, формирователь гармонических функций, вход которого объединен с вторым входом обратной связи формирователя сигналов задания активного и реак- тинного токов ротора и подключен к выходу фазового дискриминатора, а выходы формирователя гармонических функций подключены к опорным входам блока прямого преобразования ко- ординат, регулятор тока ротора, подключенный первым входом к выходу блока преобразования координат, вторым входом - к выходу датчика тока ротора, а выходом - к управ35
ляющему входу ггреобразователя частоты с непосредственной связью, датчики тока и напряжения статора, подключенные выходами к соответствующим информационным входам формирователя сигна 40 лов задания активного и реактивного токов ротора и к входам блока обратного преобразования координат, первый иоход которого подключен к первому входу обратной связи формирователя 45
Q 5 0 5 Q
5
5
сигналов задания активного и реактивного токов ротора, а второй и третий выходы блока обратного преобразования координат подключены соответственно к второму и третьему входам фазового дискриминатора, соединенного первым входом с вторым выходом формирователя сигналов задания активного и реактивного токов ротора, при этом фазовый дискриминатор выполнен из регулятора частоты скольжения, блока деления и элемента сравнения, выход которого подключен к входу для делимого блока деления, причем первый и второй входы элемента сравнения и вход для делителя блока деления обра- зуют соответственно первый, второй и третий входы фазового дискриминатора, а выход регулятора частоты скольжения образует выход фазового дискриминатора, отличающийся тем, что, с целью повьппения стабильности частоты вращения при аварийных бросках входного силового тока преобразователя частоты с непосредственной связью, в него введены датчик входного силового тока преобразователя частоты с непосредственной связью, индикатор рассогласования с двумя входами и управляемый ключ, а преобразователь частоты с непосредственной связью снабжен дополнительным входом перевода в инверторный режим, который объединен с управляющим входом управляемого ключа и подключен к выходу индикатора рассогласования,, при этом выводы управляемого ключа подключены соответственно к выходу блока деления и входу регулятора частоты скольжения, а выходы датчика тока ротора и датчика входного силового тока преобразователя частоты с непосредственной связью подключены к входам индикатора рассогласования.
Редактор М.Бандура
Составитель А.Жилин
Техред Г.Гербер Корректор М.Шароши
Заказ 4424/56 Тираж 631 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Цроиззодственно-полиграфическое предприятие, г.Ужгород,ул.Проектная, 4
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
Изобретение относится к электротехнике, а именно к электроприводу механизмов. Цель изобретения - повышение стабильности частоты вращения при аварийных бросках входного силового тока преобразователя. Устройство содержит асинхронный двигатель 1, датчик 2 тока ротора, преобразователь частоты (ПЧ) 3 с непосредственной связью, формирователь 4 сигналов задания активного и реактив ного токов ротора с двумя информационными входами 5 и 6, блок 11 прямого преобразователя координат, фазовый дискриминатор 12, формирователь 16 гармонических функций, регулятор 17 тока ротора, датчики 19 и 20тока и напряжения статора, блок 21обратного преобразования координат. Фазовый дискриминатор 12 выполнен на регуляторе 22 частоты скольжения, блоке 23 деления и элементе сравнения 24. Введение датчика 25 входного силового тока ПЧ 3, индикатора 26 рассогласования и управляемо го ключа 27 и снабжение ПЧ 3 дополни тельным входом 28 обеспечивает перевод на короткое время ПЧ 3 в инвер- торный режим при аварийных бросках тока и его возврат к нормальному функционированию, благодаря чему исключается необходимость аварийных от ключений электропривода. 2 ил. ( (Л
| Автономный инвертор напряжения | 1977 |
|
SU675561A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
