со to
СП
сх
Изобретение относится к электротехнике, а именно к электроприводу переменного тока на базе машины двойного питания с непосредственным преобразователем частоты в цепи ротора, и может быть использовано в механизмах, требующих высоких динамических свойств и повышенной надежности, нарегулятора 5 частоты скольжения соединен с выходом фазового дискриминатора 6, второй и третий входы которого соединены соответственно с первым и вторым выходами блока 8 обратного преобразования, соединенного третьим выходом с входом обратной связи по реактивному току статора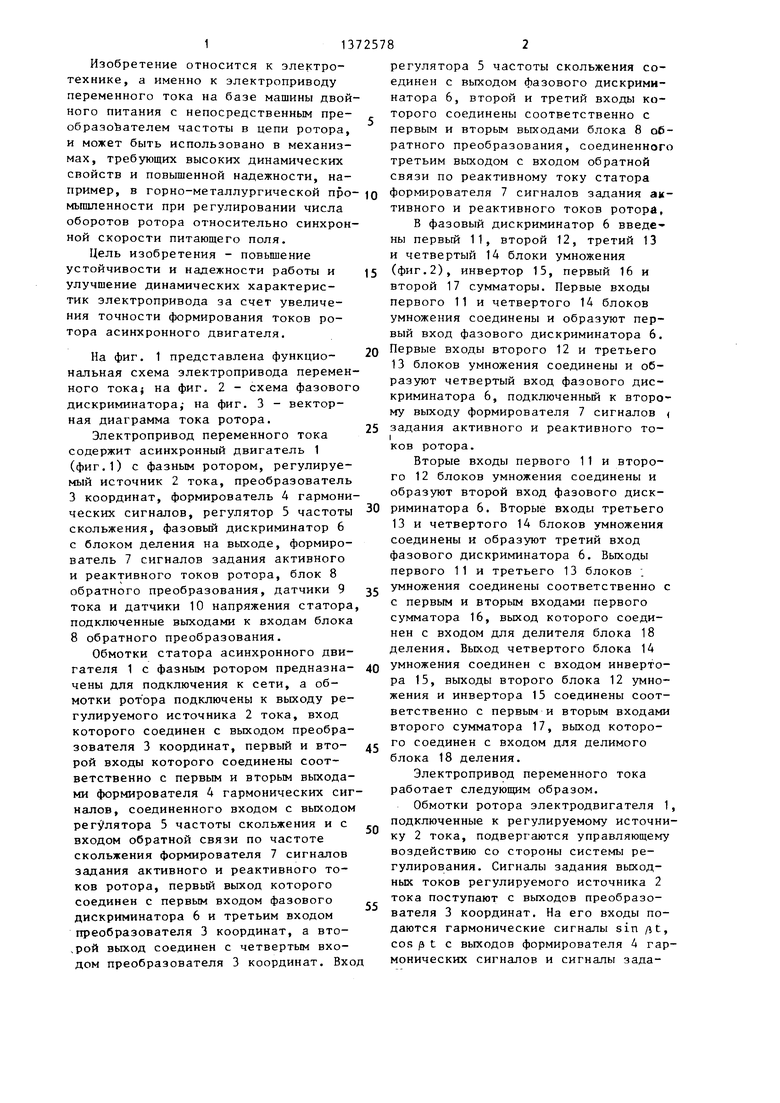

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1984 |
|
SU1251281A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Электропривод переменного тока | 1987 |
|
SU1439728A2 |
| Электропривод с асинхронной машиной с фазным ротором | 1979 |
|
SU1108597A2 |
Изобретение относится к электротехнике и может быть использовано в горно-металлургической промышленности. Целью изобретения является повышение устойчивости и надежности работы и улучшение динамических характеристик электропривода за счет увеличения точности формирования токов ротора асинхронного двигателя. Указанная цель достигается введением в электропривод переменного тока блоков умножения 11, 12, 13, 14, инвертора 15, сумматоров 16, 17. Указанные блоки вxo,ят в состав фазового дискриминатора 6 электропривода. В результате в фазовом дискриминаторе 6 реализуется зависимость ( (icx J-PBOA if a-) гзмд io i-awPi где i,, i,, i,, ip,,- действительные и заданные значения активной и реактивной составляющих тока ротора. Сигнал d 1 поступает на вход регулятора частоты скольжения независимо от реальных изменений величин коэффициентов обратной связи цепей формирования активного и реактивного токов ротора. Наличие такого сигнала на входе регулятора и повышает точность формирования токов. 3 ил. с ф (Л
15
20
30
пример, в горно-металлургической про- ю Формирователя 7 сигналов задания ait- мышленности при регулировании числа оборотов ротора относительно синхронной скорости питающего поля.
Цель изобретения - повышение устойчивости и надежности работы и улучшение динамических характеристик электропривода за счет увеличения точности формирования токов ротора асинхронного двигателя.
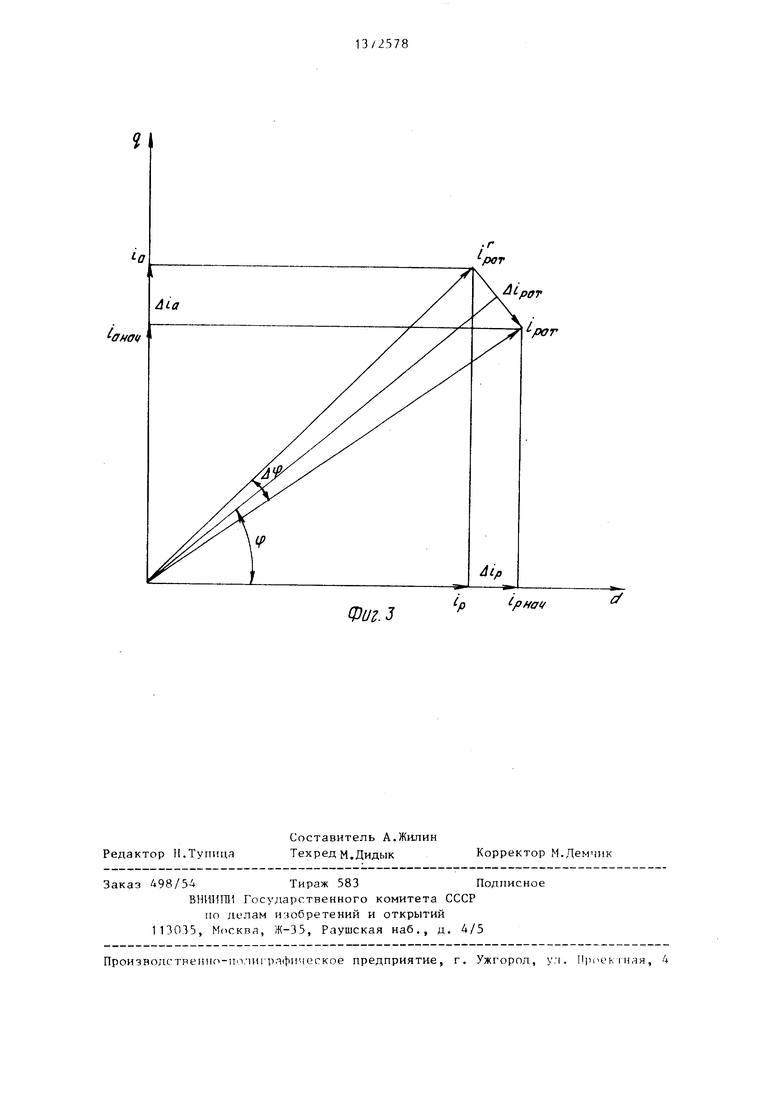
На фиг. 1 представлена функциональная схема электропривода переменного TOKaj на фиг. 2 - схема фазового дискриминатора,- на фиг. 3 - векторная диаграмма тока ротора.
Электропривод переменного тока содержит асинхронный двигатель 1 (фиг.1) с фазным ротором, регулируемый источник 2 тока, преобразователь 3 координат, формирователь 4 гармонических сигналов, регулятор 5 частоты скольжения, фазовый дискриминатор 6 с блоком деления на выходе, формирователь 7 сигналов задания активного и реактивного токов ротора, блок 8 обратного преобразования, датчики 9 тока и датчики 10 напряжения статора, подключенные выходами к входам блока 8 обратного преобразования.
Обмотки статора асинхронного двигателя 1 с фазным ротором предназначены для подключения к сети, а обмотки рот ора подключены к выходу регулируемого источника 2 тока, вход которого соединен с выходом преобразователя 3 координат, первый и второй входы которого соединены соответственно с первым и вторым выходами формирователя 4 гармонических сигналов, соединенного входом с выходом рег лятора 5 частоты скольжения и с входом обратной связи по частоте скольжения формирователя 7 сигналов задания активного и реактивного токов ротора, первый выход которого соединен с первым входом фазового дискриминатора 6 и третьим входом преобразователя 3 координат, а вто- ,рой выход соединен с четвертым входом преобразователя 3 координат. Вход
тивного и реактивного токов ротора, В фазовый дискриминатор 6 введены первый 11, второй 12, третий 13 и четвертый 14 блоки умножения (фиг.2), инвертор 15, первый 16 и второй 17 сумматоры. Первые входы первого 11 и четвертого 14 блоков умножения соединены и образуют первый вход фазового дискриминатора 6. Первые входы второго 12 и третьего 13 блоков умножения соединены и образуют четвертый вход фазового дискриминатора 6, подключенный к второму выходу формирователя 7 сигналов
25 задания активного и реактивного то- I ков ротора.
Вторые входы первого 11 и второго 12 блоков умножения соединены и образуют второй вход фазового дискриминатора 6. Вторые входы третьего 13 и четвертого 14 блоков умножения соединены и образуют третий вход фазового дискриминатора 6. Выходы первого 11 и третьего 13 блоков ; умножения соединены соответственно с с первым и вторым входами первого сумматора 16, выход которого соединен с входом для делителя блока 18 деления. Выход четвертого блока 14 умножения соединен с входом инвертора 15, выходы второго блока 12 умножения и инвертора 15 соединены соответственно с первым и вторым входами второго сумматора 17, выход которого соединен с входом для делимого блока 18 деления.
Электропривод переменного тока работает следующим образом.
Обмотки ротора электродвигателя 1, подключенные к регулируемому источнику 2 тока, подвергаются управляющему воздействию со стороны системы регулирования. Сигналы задания выходных токов регулируемого источника 2 тока поступают с выходов преобразователя 3 координат. На его входы подаются гармонические сигналы sin /it, cos /5 t с выходов формирователя 4 гармонических сигналов и сигналы зада35
40
45
50
55
Формирователя 7 сигналов задания ait-
тивного и реактивного токов ротора, В фазовый дискриминатор 6 введены первый 11, второй 12, третий 13 и четвертый 14 блоки умножения (фиг.2), инвертор 15, первый 16 и второй 17 сумматоры. Первые входы первого 11 и четвертого 14 блоков умножения соединены и образуют первый вход фазового дискриминатора 6. Первые входы второго 12 и третьего 13 блоков умножения соединены и образуют четвертый вход фазового дискриминатора 6, подключенный к второму выходу формирователя 7 сигналов
задания активного и реактивного то- I ков ротора.
Вторые входы первого 11 и второго 12 блоков умножения соединены и образуют второй вход фазового дискриминатора 6. Вторые входы третьего 13 и четвертого 14 блоков умножения соединены и образуют третий вход фазового дискриминатора 6. Выходы первого 11 и третьего 13 блоков ; умножения соединены соответственно с с первым и вторым входами первого сумматора 16, выход которого соединен с входом для делителя блока 18 деления. Выход четвертого блока 14 умножения соединен с входом инвертора 15, выходы второго блока 12 умножения и инвертора 15 соединены соответственно с первым и вторым входами второго сумматора 17, выход которого соединен с входом для делимого блока 18 деления.
Электропривод переменного тока работает следующим образом.
Обмотки ротора электродвигателя 1, подключенные к регулируемому источнику 2 тока, подвергаются управляющему воздействию со стороны системы регулирования. Сигналы задания выходных токов регулируемого источника 2 тока поступают с выходов преобразователя 3 координат. На его входы подаются гармонические сигналы sin /it, cos /5 t с выходов формирователя 4 гармонических сигналов и сигналы зада
313
ния активного и реактивного токов ротора с выходов формирователя 7 сигналов задания активного и реактивного токов ротора. Частота сигналов sin fbt, cos/5 t пропорциональна величине аналогового сигнала, поступающего на вход формирователя 4 гармонических сигналов с выхода регулятора 5 частоты скольжения. Этот же аналоговый сигнал служит сигналом обратной связи по частоте скольжения для формирователя 7 сигналов задания активного и реактивного токов ротора Сигнал обратной связи по реактивному току статора формируется в блоке 8 обратного преобразования и поступает на вход обратной связи по реактивному току статора формирователя 7 сигналов задания активного и реактивного токов ротора.
Входным сигналом регулятора 5 частоты скольжения является выходной сигнал /J I/ фазового дискриминатора 6. Так как сигнал uif является входным сигналом астатического регулятора (регулятора 5 частоты скольжения), при появлении ненулевого значения /1 f выходной сигнал регулятора 5 частоты скольжения меняется таким образом, чтобы сигнал J о стал равным нулю.
В рассматриваемом злектроприводе сигнал d (/формируется таким образом, чтобы ослабление величины токов ротора по сравнению с сигналами задания, а также величина коэффициента обратной связи цепей формирования сигналов активного и реактивного т6- ков ротора не влияли на качество и устойчивость работы электропривода во всем диапазоне рабочих частот. Это обеспечивается формированием в фазовом дискриминаторе 6 сигнала й( путем выделения его из сигнала
- - (1)
а-JO А PiciA
Для этого нужно, чтобы входными сигналами фазового дискриминатора 6 бьши сигналы задания активного и реактивного токов ротора РЭДА и сигналы реальных значений активного и реактивного токов ротора i5,, ip,
к
гад
коэффициент ослабления, который может меняться с изменением частоты скольжения привода.
момент времени, в который принять за начальный, то име
Ч,
чаи зид
i KU
(3)
мачЮА
При появлении ненулевого значения фазового рассогласования ( л (/Ц О, фиг.З) имеем:
+ d 1„,
майо
1
ip - di
нпи
(А)
р
с учетом малого значения Ji/ имеем:
л л ч, i
dig 4 i cos a cos it
34-1
p
(5)
25
ip л i 4t/i sin t/
iM -ia. Тогда из (1) с учетом (2-5) получаем:
0
0
Jif
- lp 1-ЧгоА
bOf,
+ 1
(6)
-JOA
Выражение (6) реализуется в фазовом дискриминаторе 6 с помощью блоков 11-18.
Таким образом, введение в фазовый дискриминатор блоков умножения, сум- маторов и инвертора обеспечивает образование входного сигнала V для регулятора частоты скольжения вне зависимости от реальных изменений величин коэффициентов обратной связи цепей формирования активного и реактивного токов ротора, благодаря чему в сравнении с известным решением увеличивается точность формирования токов, исключается возможность попадания системы регулирования скорости электропривода в неустойчивый режим работы и повьппается надежность работы.
5
50
Формула изобретения
,
Электропривод переменного тока, содержащий асинхронный двигатель с фазным ротором, регулируемый источ- ник тока, преобразователь координат, формирователь гармонических сигналов, регулятор частоты скольжения, фазовый дискриминатор с блоком деления
513
на выходе, формирователь сигналов задания активного и реактивного токов ротора, блок обратного преобразования, датчики тока и напряжения статора, подключенные выходами к входам блока обратного преобразования, обмотки статора асинхронного двигателя с фазным ротором предназначены для подключения к сети, а обмотки рото- ра подключены к выходу регулируемого источника тока, вход которого соединен с выходом преобразователя координат, первый и второй входы которого соединены соответственно с первым и вторым выходами формирователя гармонических сигналов, соединенного входом с выходом регулятора частоты скольжения и с входом обратной связи по частоте скольжения формирователя сигналов задания активного и реактивного токов ротора, первый выход которого соединен с первым входом фазового дискриминатора и третьим входом преобразователя координат, а второй выход соединен с четвертым входом преобразователя координат, вход регулятора частоты скольжения соединен с выходом фазового дискриминатора, второй и третий входы которого соединены соответственно с первым и вторым выходами блока обратного преобразования, соединенного третьим выходом с входом обратной связи по реактивному току статора формирователя сигналов задания активного и реактивного токов ротора, отличаю
86
щ и и с я тем, что, с целью повьше- ния устойчивости и надежности работы и улучшения динамических характеристик электропривода за счет увеличения точности формирования токов ротора, в фазовый дискриминатор введены первый, второй, третий и четвер- тый блоки умножения, инвертор, первый и второй сумматоры, первые входы первого и четвертого блоков умножения соединены и образуют первый вход фазового дискриминатора, первые входы второго и третьего блоков умножения соединены и образуют четвертый вход фазового дискриминатора, подключенный к второму выходу формирователя сигналов задания активного и реактивного токов ротора, вторые входы первого и второго блоков умножения соединены и образуют второй вход фазового дискриминатора, вторые входы третьего и четвертого блоков умножения соединены и образуют третий вход
фазового дискриминатора, выходы первого и третьего блоков умножения соединены соответственно с первым и вторым входами первого сумматора, выход которого соединен с входом для делителя блока деления, выход четвертого блока умножения соединен с входом инвертора, выходы второго блока умножения и инвертора соединены соответственно с первым и вторым входами второго сумматора, выход которого соединен с входом для делимого блока деления.
рот
рог
Фиг.з
| Устройство управления асинхронной машиной с фазным ротором | 1973 |
|
SU517128A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1980 |
|
SU1037405A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
