Изобретение отиисится к горнорудио промышленности н предна.чначено лля автоматического управления положением кулчкок лля клети шахтной чол ьемной устпионки, Цель изобретения повышение належ- иости работы посалочных кулаков
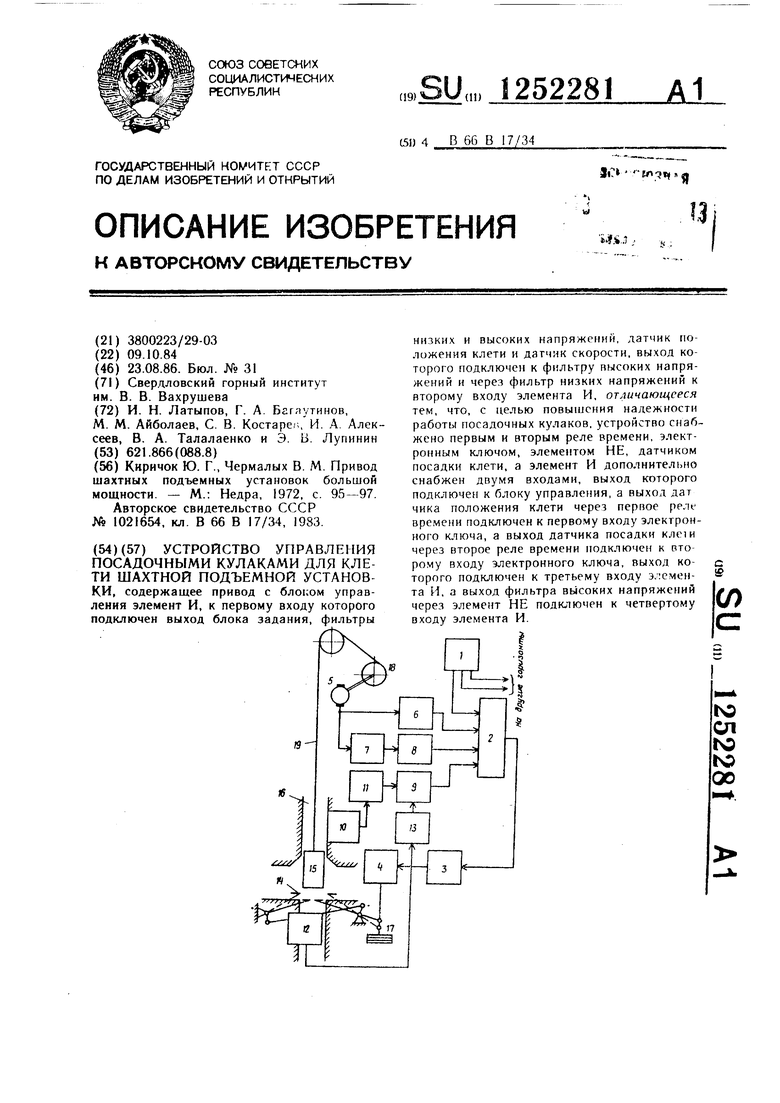
На чертеже изображена функиио11а.1Ы1ап схема устройетва управления посадочными кулаками шахтной польемной установки Устройство состоит из блока задания, выход которого подключен на первый вхол логического элемента И 2, выход которого соединен с входом блока 3 унрав-ченип привода 4 посадочны); кулаков. К второму и третьему входам элемента И 2 подсоединен выход датчика 5 скорости через фильтры низкого G и высокого 7 напряжении и ло- гический элемент HF Я. Фи.и.тп О шс-ктп напряжения настроен на напряжение латчи ка 5 скорости, соответствующее Г)е:к)11ас ной скорости посадки клети на куллки (,3-0,5 м/с), фильтр 7 высокого напряжения настроен на напряжение, cooraei ствуюшее скорости, Г1ревын1аюп1ей бетопас ную скорость (,3-0,5 м/с) посадки клети. Четвертый вход элемента И 2 соединсп с выходом электронного ключа 9, имеющего два входа. К первому входу электронного ключа 9 подключен выход датчика 10 положения клети VepeB первое реле 11 времени, на второй вход - выход датчика 12 посадки клети через второе pe;ie 13 времени, а также имеются посадочные кулаки И клети ЬЗ, размешенной в стволе Ifi. Посадочные кулаки снабжены противовесом 17, а клегь СВР зана с органом 18 навивки подъемной устп новки с помощью каната 19
Устройство управления посалочпымп к.- лаками для клети шахтной подъемной ус-ра новки работает слелуюии;м образом.
Первый входной сиг пал на Rropoii вхоч. логического элемента И 2 подается от блока 1 задания, когда опера гором iiujii,i:M,i i. cf.o ветствии с технологической необхолимостью выбирается рабочий горизонт, куда нриОыва ет клеть 15 и соприкасается с посало - ными кулаками 14. Однако на выходе л(я-и ческого элемента И 2 сигнала нег и блок 3 управления не приводит к действие ipnHo;i -V поэтому посадочные кулаки 14 под действием противовесов 17 остаются отведенными в сто ромы от подъемного отделения CTISO.I;I Ifi шахты.
Сигнал от датчика 5 скорости, nporioj циональный скорости движения клоти 15 в стволе 16 шахты, поступает на входы фильтров низких 6 н высоких 7 напряжений
При движении клети 15 в стноле 16 с номинальной скоростью, которая вьлне скорости подхода клети 15 к посадочным кулакам 14, сигнал датчика 5 скорости проходит только через фильтр 7 высоксгв на пряжения и логическим эл ччоитом Н1л 8 пбр;пуртся из истинного вьи ка.лыпання в лож- пое, поэтому с выхода лрм птл НЕ 8 на
5
rpoiHii вход элемента И 2 сигнал уже не подается. Не полается сигнал и на первый вход элеме|гга И 2 е выхода фильтра 6 низкого па1фяжспия. Поэтому клеть 15 свободно проходит данный горизонт, т.е. посадочные кулаки 14. Прохождение клети 15 мимо датчика 10 положения клети с номинальной скоростью вызывает у последнего появление выходного сигнала, который через первое реле 11 времени и открытый электрониый ключ 9 поступает на четвертый вход элемента И 2, но это не вызывает появление выходного сигнала у логического элемента И 2, так как отсутствуют сигналы на других его входах (от датчика 5 скорости и от блока 1 задания).
При подходе клети 15 к рабочему го- (мг (1 с лопуснасмой лля посадки скоростью сигпал с датчика 5 скорости проходит фили1 ; ии:;к(ио напряжения и поступает на nojiBbni вход логического элемента
,-) и 2. Сигнал латчика 5 скорости не проходи: чсре i фильтр 7 ВЫСОКО1-О напряжения, nojTOMv на пыхоле фильтра 7 сигнал отсутствует, однако логический НЕ 8 г.ри 1и. ус.ювиях с(рормнрует выходной сигпал, 1|--;-;пваемый на третий вход элемен та И 2. В момент прохождения клети 5 мимо латчика 10 положения клети, у последнего (|)0рмируется сигнал, который чер. З первое Ч лс 11 времени и открытый электронный к,;1И5ч поступает нм четвертый вход ЛО1 И ческого элсментг, И 2. Присутствие- сигналов
па ucfX входах элемента И 2 олпойре- менио иьпипает появление у него выходного сигнала, который сформирует на выходе блока 3 управления команду дня приведе- пия привода 4 в лейстпие, который преодолев противодействие противовеса 17, вы ставляет посадочные кулаки 14 в ствол 16. Псрлор реле 11 времени пг)зно;1яет сохранить па (етвертом входе элемента И 2 сиг- па. 1атчика К) по.К жепия (теги даже после прохождения клг Т1 ю 15 зины действия
Q И) датчика, тем самым удержать привод 1 во BK.Tioi. CHiiC M состоянии, а кулаки 14 выставленными в ствол 16 до самой посадки клетн 15 на кулаки 14.
В момент посадки клети 15 на кулаки 14 срабатывает датчик 12 посадки клети,
З выходной сигнал которого через второе реле 13 времени поступает на вход управления электронного |;люча 9 и закрывает его, отсекая сигнал первою реле 11 времени от четвертого входа логического э.темгнта И 2. Отсутствие одного из сигналов на входе приводит v прекращению форми1.1ования выходного сигнала как у элемента М 2, так и у блока 3 управления, в ре.у. 1ьтате чего привод 4 отключается. Второе реле 13 времени остается под напряжением. Перед нача5 лом следуюш.его движения оператор подьема в блоке 1 задания меняет программу в соответствии с HOBI.-IM адресом твижения клети 15, поэтому с выхода бло0
ка 1 задания на первый вход логического элемента И 2 сигнал не подается. При снятии клети 15 с кулаков 14 последние под действием противовеса 17 автоматически отводятся назад К стенкам ствола 16 и путь для движения клети 15 по стволу 16 открыт.
Однако в случае сохранения прежней программы в блоке I задания в начале движения клети 15 к другому горизонту на трех входах (первом, втором и третьем) логического элемента И 2 появляются сигналы: с блока 1 задаиия, с фильтра 6 низкого напряжения и с логического элемента НЕ 8, так как кле/ь перемещается на малой скорости.
При приближении клети 15 к датчику 10 положения на выходе последнего формируется сигнал, поступление которого на незаполненный четвертый вход логического элемента И 2 может вызвать ложное включение привода 4 и непрограммироваиное выставление кулаков 14 в ствол 16. С целью недопущения ложных срабатываний кулаков 14 после снятия сигнала датчика 12 посадки клети с входа второго реле 13 времени последнее продолжает удерживать электронный ключ 9 в закрытом состоянии и на четвертый вход логического элемента И 2 сигнал не проходит. Поэтому при прохождении уходящего с горизонта клети 15 около датчика 10 положения посадочные кулаки 14 останутся откинутыми.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления посадочными кулаками для клети шахтной подъемной установки | 1982 |
|
SU1021654A1 |
| Устройство контроля клети шахтной подъемной установки | 1987 |
|
SU1502452A1 |
| УСТРОЙСТВО ПОСАДОЧНОЕ ШАХТНОЙ КЛЕТИ (ВАРИАНТЫ) | 2009 |
|
RU2405734C1 |
| Система управления импульсного водомета | 1990 |
|
SU1760120A1 |
| Устройство для измерения вертикальных профилей гидрологических параметров морской воды | 1980 |
|
SU935769A1 |
| УСТРОЙСТВО ПОСАДОЧНОЕ ОТКИДНОЕ С УПРАВЛЯЕМЫМИ КУЛАКАМИ | 2002 |
|
RU2235207C2 |
| АВТОМАТИЧЕСКИЙ ПРЕДКЛЕТЕВОЙ СТОПОР | 1973 |
|
SU368167A1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| ПОСАДОЧНОЕ УСТРОЙСТВО ДЛЯ ШАХТНЫХ КЛЕТЕЙ | 1970 |
|
SU259338A1 |
| Киричок Ю | |||
| Г., Чермалых В | |||
| М | |||
| Привод шахтных подъемных установок большой мощности | |||
| - М.: Недра, 1972, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Устройство управления посадочными кулаками для клети шахтной подъемной установки | 1982 |
|
SU1021654A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
