-/5
Дне8ная поЗерлмость
СП
о IND
4;
СП
ю
313024
установлены в стволе шахты на горизонте, а геркон 17 и ЭМ 18 - в клети 5. Герконы 16 и 17 могут находиться в возбу7 оденном состоянии только при одновременном действии на них магнитных полей магнита 15 и ЭМ 18. Состояние П 7 является функцией состояния пружины 19 шахтного парашюта. При поломке пружи1а1 19 не обеспечи- вается ее полньп рабочий ход, что и фиксируется действием П 7. Многоканальная аппаратура 8 состоит из передающего 20 и приемного 21 блоков. Вхоп, блока 20 соединен с герконом 17 и через П 7 - с ЭМ 18, ас выхода блока 21 сигналы поступают на блоки 11 и 12 сигнализации и блоки управления 22 и 23 npe/;oxpaHnTej bHbiM тормозом и подъемным электродвигателем . Устр-во позволяет передавать сигналы из клети 5 и горизонта по радиоканалу связи. 1 ил.
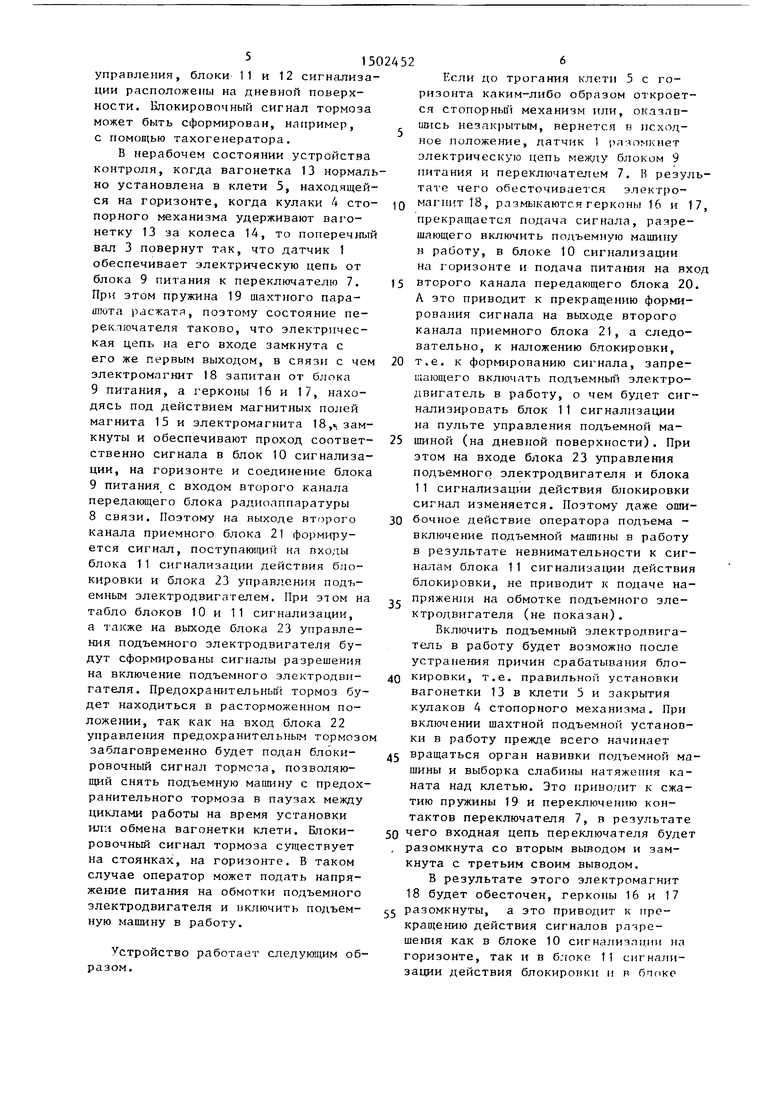
Изобретение относится к горнорудной промышленности и предназначено для контроля положения стопоров в клети на клетевых подъемных установках. Цель - повышение экономичности устройства контроля при одновременном повышении надежности эксплуатации. Устройство содержит датчик 1 контроля стопорения, вагонетки, запирающий элемент 2, механически связанный через поперечный вал 3 с кулаками 4 стопорного механизма клети 5, горизонтальный выключатель 6, переключатель (П) 7 многоканальной аппаратуры 8 и блок 9 питания. На пульте управления подъемом на дневной поверхности установлены блоки 10 сигнализации на горизонте, действия блокировки 11 и действия защиты 12. Выключатель 6 выполнен в виде системы магнит 15 - геркон 16 - геркон 17 - электромагнит (ЭМ) 18. Магнит 15 и геркон 16 установлены в стволе шахты на горизонте, а геркон 17 и ЭМ 18 - в клети 5. Герконы 16 и 17 могут находиться в возбужденном состоянии только при одновременном действии на них магнитных полей магнита 15 и ЭМ 18. Состояние П 7 является функцией состояния пружины 19 шахтного парашюта. При поломке пружины 19 не обеспечивается ее полный рабочий ход, что фиксируется действием П 7. Многоканальная аппаратура 8 состоит из передающего 20 и приемного 21 блоков. Вход блока 20 соединен с герконом 17 и через П 7 - с ЭМ 18, а с выхода блока 21 сигналы поступают на блоки 11 и 12 сигнализации и блоки управления 22 и 23 предохранительным тормозом и подъемным электродвигателем. Устройство позволяет передавать сигналы из клети 5 и горизонта по радиоканалу связи. 1 ил.
Изобретение относится к горнорудной промьшшеииости и может найти применение на шахтных подъемньк установ ках, в частности на клетевых подъемных установках для контроля положения стопоров в клети, как при обмене вагонеток на горизонтах, так и при
движении клети с вагонеткой по ство- лу, а также для контроля натяжения подъемного каната и целостности пружины шахтного парашюта.
Целью изобретения является повышение экономичности устройства конт- роля при одновременном повышении надежности эксплуатации.
На чертеже изображена схема предлагаемого устройства контроля клети шахтной подъемной уст 1новки.
Устройство контроля клети l( ной подъемной установки состоит из датчика 1 контроля стопорения вагонетки, запирающего элемента 2, имеющего через поперечный вал 3 механи- чес.куи связь с кулаками 4 стопорного механизма (показан-частично) клети 5 горизонтального выключателя 6, переключателя 7, многоканальной радиоаппаратуры 8, блока 9 питания, блока 10 сиг н. олизации на горизонте, блока 11 сигнализации действия блокировки и блока 12 сигнализации действия защиты, установленных на пульте управления подъемом, т.е. на дневной по- верхности. Кулаки 4 стопорного механизма предназначены для стопорения вагонетки 13 за колеса 14, когда она находится в клети 5. Датчик 1 контроля стопорения вагонетки выполнен так, что его состояние (включено - выключено) зависит от угла поворота поперечного вала 3 стопорного механизма. Горизонтальный выключатель 6
выполнен в виде системы магнит 15 - геркон 16 - геркон 17 - электромагнит 18, причем магнит i 5 и первый геркон 16 установлены в стволе шахты на горизонте, а второй геркон 17 и электромагнит 18 размещены в клети 5. Размещепие герконов 16 и 17 относительно магнита 15 и электромагнита 18 таково, что как первый 16, так и второй 17 герконы могут находиться в возбужденном состоянии (за- мькающиеся контакты замкнуты) только при одновременном действии на них магнитных полей магнита 15 и электромагнита 18. Переключатель 7 выполнен так, что состояние (открыто-закрыто) его является функщ1ей состояния пружины 19 шахтного парашюта.
Вход датчика 1 соединен с выходом блока 9 питания, а выход соединен с первым зыводом переключателя 7, второй вывод которого подключен на вход электромагнита 18, а третий вывод - на вход первого канала передающего блока 20. На вход второго канала передающего блока 20 подключен блок 9 питания через геркон 17. Геркон 16 установлен на входных цепях блока 10 сигнализации на горизонте. Выход первого канала приемного блока 21 соединен с входами блока 22 управления предохранительным тормозом, блока 12 сигнализации действия защиты, блока 23 управления подъемного электродвигателя. Выход второго канаиа приемного блока 21 соединен с входами блока 23 управления подъемного электродвигателя и блока 11 сигнализа- ЦРП1 действия блокировки. Кроме того, на вход блока 22 управления предохранительным тормозом введен блокировоч- Hbrfi сигнал тормоза. Блоки 22 и 23
515
управления, блоки 11 и 12 сигнализации расположены на дневной поверхности. Блокировочный сигнал тормоза может быть сформирован, например, с помощью тахогенератора.
В нерабочем состоянии устройства контроля, когда вагонетка 13 нормално установлена в клети 5, находящейся на горизонте, когда кулаки 4 стопорного механизма удерживают вагонетку 13 за колеса 14, то поперечны вал 3 повернут так, что датчик 1 обеспечивает электрическую цепь от блока 9 питания к переключателю 7. При этом пружина 19 шахтного парашюта расжатя, поэтому состояние переключателя таково, что электрическая цепь на его входе замкнута с его же первым выходом, в связи с чем электромагнит 18 запитан от блока 9 питания, а герконы 16 и 17, находясь под действием магнитных полей магнита 15 и электромагнита 18,. замкнуты и обеспечивают проход соответственно сигнала в блок 10 сигнализации, на горизонте и соединение блока 9 питания с входом второго канала передающего блока радиоаппаратуры 8 связи. Поэтому на выходе второго канала приемного блока 21 ется сигнал, поступающий на входы блока 11 сигнализации действия блокировки и блока 23 управления подъемным электродвигателем. При этом на табло блоков 10 и 11 сигнализации, а также на выходе блока 23 управления подъемного электродвигателя будут сформированы сигналы разрешения на включение подъемного электродвигателя. Предохранительньй тормоз будет находиться в расторможенном положении, так как на вход блока 22 управления предохранительным тормозо заблаговременно будет подан блокировочный сигнал тормоза, позволяющий снять подъемную машину с предохранительного тормоза в паузах между циклами работы на время установки ШП1 обмена вагонетки клети. Блокировочный сигнал тормоза существует
на стоянках, на горизонте. В таком случае оператор может подать напряжение питания на обмотки подъемного электродвигателя и ьключить подъемную машину в работу.
Устройство работает следующим образом.
0
5
0
Если цо трогания клети 5 с горизонта каким-либо образом откроется стопорньп механизм или, оказавшись незакрытым, вернется в исходное положение, датчик 1 разомкнет электрическую цепь между блоком 9 питания и переключателем 7. В результате чего обесточивается электромагнит 18, размыкаютсягерконы 16 и 17, прекращается подача сигнала, разрешающего включить подъемную машину в работу, в блоке 10 сигнализации на горизонте и подача питания на вход второго канала передающего блока 20. А это приводит к прекращению формирования сигнала на выходе второго канала приемного блока 21, а следовательно, к наложению блокировки, т.е. к формированию сигнала, запрещающего включать подъемньт электродвигатель в работу, о чем будет сиг- нализиропать блок 11 сигнализации на пульте управления подъемной ма- 5 шиной (на дневной поверхности). При этом на входе блока 23 управления подъемного электродвигателя и блока 11 сигнализации действия блокировки сигнал изменяется. Поэтому даже ошибочное действие оператора подъема - включение подъемной машины в работу в результате невнимательности к сигналам блока 11 сигнализагщи действия блокировки, не приводит к подаче напряжения на обмотке подъемного электродвигателя (не показан).
Включить подъемный электродвигатель в работу будет возможно после устранения причин срабатывания блокировки, т.е. правильной установки вагонетки 13 в клети 5 и закрытия кулаков 4 стопорного механизма. При включении шахтной подъемной установки в работу преяоде всего начинает вращаться орган навивки подъемной машины и выборка слабины натяжения каната над клетью. Это приводит к сжатию пружины 19 и переключению контактов переключателя 7, в результате 0 чего входная цепь переключателя будет , разомкнута со вторым выводом и замкнута с третьим своим выводом.
В результате этого электромагнит 18 будет обесточен, герконы 16 и 17 5 разомкнуты, а это приводит к прекращению действия сигналов разре- шеш1я как в блоке 10 сигнализации на горизонте, так и в б.чоке 11 сигнализации действия блокировки и п блоке
0
5
0
5
23 управления подъемным электродвигателем. Однако подъемный электродвигатель (не показан) остается во включенном состоянии, так как иа входе блока 23 управления подъемного электродвигателя снятый сигнал с выхода второго канала приемного блока 21 будет заменен разнозначным сигналом с выхода первого канала прием- кого блока. Соединение электрической цепи входа и второго выхода переключателя приводит к тому, что на вход первого канала передающего блок
20радиоаппаратуры связи 8 будет по- дано питание. В результате чего на выходе первого канала приемного блок
21появляется сигнал, который будет подан на входы блока 12 сигнализации действия защиты и блока 22 уп- равления предохранительным тормозом,
а также на вход блока 23 управления подъемным электродвигателем, причем гораздо раньше, чем будет снят с его входа сигнал второго канала приемно- го блока 21. Таким образом, с момента трогания клети 5 с горизонта вступает в действие блок 22 управления предохранительным тормозом, который все время, пока клеть перемещается от одного горизонта до другого, выполняет роль защиты от выкатывания вагонетки 13 из клети 5, пступаег в действие блок 12 сигнализации действия защиты, указывающий о наличии соответствующего сигнала на пходе блока 22 управления кроме того, снимается сигцал блокировки со входа блока 23 управле1П1я подъемного электродвигателя и со входа блока 11 сигнапизап 1и действия блокировки, как не нужный при движении клет1Г по стволу.
В случае открывания кулаков 4 стопорного механизма и освобождения колес 14 вагонетки 13 при движении клети 5 по стволу шахты поперечный вал 3 приводит к срабатыванию датчика 1 и к разрыву электрической цепи между блоком 9 пита1гия и входом первого канала передающего блока 20 от чего первый канал передающего блока прекращает свою работу. Тогда не будет сигнала и на выходе первог канала приемного блока 21. Это приводит к прекращению подачи сигнала на входы блока 22 управления предохранительного тормоза, в результате чего происходит наложение прсдохра
Q
,.
5
нительного тормоза и экстренная остановка подъемной ма1Ш1ны и клети в стволе, одновременно с этим и отключение подъемного электродвигателя через блок 23 управления. О случившемся будет HHf})opN iHpoBaTb блок 1 1 сигнализации действия защиты.
Повторное включение подъемной машины в работу возможно только носле осмотра и устране1дая причин экстренной остановки.
В случае зависания клети 5 в стволе шахты и ослабления натяжения подъемного каната происходит расжатие пружины 19 шахтного парашюта и переключение переключателя 7 в исходное положение. В результате элекгричес- кая цепь между третьим иьгопдом переключателя 7 и его первым выводом будет разорвана и нхо; первого канала передающего блока 20 обесточииается. Далее, действие схемы устройства аналогично случаю, связанному с открыванием кулаков 4 стопорного механизма при движении клети 5 по стволу. Поэтому происходит наложение предохранительного тормоза отключение подъемно о электродвигателя и экстренная остановка подъемной машиН1.,
Повторное включение подъемной машины в работу воэмолсно после устранения причин аварий в стволе.
С приходом клети 5 на следующий горизонт и посадки ее на посадочные кулаки (не показаны) подъемная машина и клеть прекращают свое дви- жешге, подъемный электродвигатель отключен, рабочий тормоз наложен оператором; а стопорньй механизм автоматически открывается, что приводит к срабатыванию датчика 1 и к разрыву им цепи питания перекл1оча- теля 7. Поэтому ни на один вход пе- редаю1чего блока 20 и на обмотку э:ге- ктромагнита 18 напряжение питания не поступает. В блоках 11, 12 и 10 сигнализа1щи, а также в блоках 22 и 23 управления сигналов разрешения нет. После обмена вагонеток в клети и закрытия стопорного механизма датчик 1 восстанавливает электрическую цепь, а так как при посадке клети произошел технологический напуск каната, расжатие пруткины 19 и возврат переключателя 7 в исходное положение, то напряжение питания поступает на обмотки электромагнита 18, а не на
15
вход первого канала передающего блока 20. После включения электромагнита 18 герконы 16 и 17 замыкаются и обеспечивают сигнал разрешения на вход блока 10 сигнализации на горизонте и через второй канал радиоаппаратуры 8 связи на входы блока 23 управления подъемного электродвигателя и блока 11 сигнализации действия блокировки. Следовательно, устройство в целом приходит в исходное, т.е. в нерабочее состояние.
Предлагаемое устройство выполняет дополнительную функцию - функцию контроля целостности пружины 19 шахтного паг зппота клети 5. При поломке П1.у:.ш1ы не обеспечен полный рйбочий ход пружины, что зафиксируется действием переключателя 7.
Таким образом, предлагаемое устройство позволяет организовать передачу сигналов из клети и горизонта по радиоканалу связи, т.е. без применения кабельной линии по всей высоте ствола.
Формула изобретения
Устройство контроля клети шахтной подъемно установки, содержащее датчик контроля стопорения вагонетки.
10
5
10
первьй геркон, установленный на горизонте и соединенный с блоком сигнализации на горизонте, второй геркон, установленньп1 в клети и соеди- ненньй с одним каналом передающего блока, связанного через радиоканал с приемным блоком, один канал которого соединен с блоками управления подъемного электродвигателя, сигнализации действия защиты и управления предохранительным тормозом, блок сигнализации действия блокировки, отличающееся тем, что, с целью повьшения экономичности при одновременном повьппении надежности эксплуатации, оно снабжено переключателем и электромагнитом, установленным с возможностью взаимодействия с вторым герконом, а приемный и передающий блоки выполнены двухканальными при этом к блоку питания подключены второй геркон и датчик контроля стопорения вагонетки, выход которого соединен с первым выводом переключателя, второй вывод которого подключен к электромагниту, а третий вывод - к другому каналу передающего блока, а к соответствующему другому каналу 0 приемного блока подключены блоки сигнализации действия блокировки и управления подъемом электродвигателя.
0
5
| Блокировочное устройство стопорного механизма клети шахтной подъемной установки | 1982 |
|
SU1077850A1 |
| Латыпов И.Н | |||
| и др | |||
| Контроль сто- порения шахтной вагонетки в клети | |||
| - Горный журнал, 1983, № 12, с | |||
| Способ смешанной растительной и животной проклейки бумаги | 1922 |
|
SU49A1 |
