Изобретение относится к подъемно-транспортной технике, в частности к захватным устройствам для ст{)оительных изделий с внутренней полостью.
Цель изобретения - повышение надежности подъемно-транспортных работ.
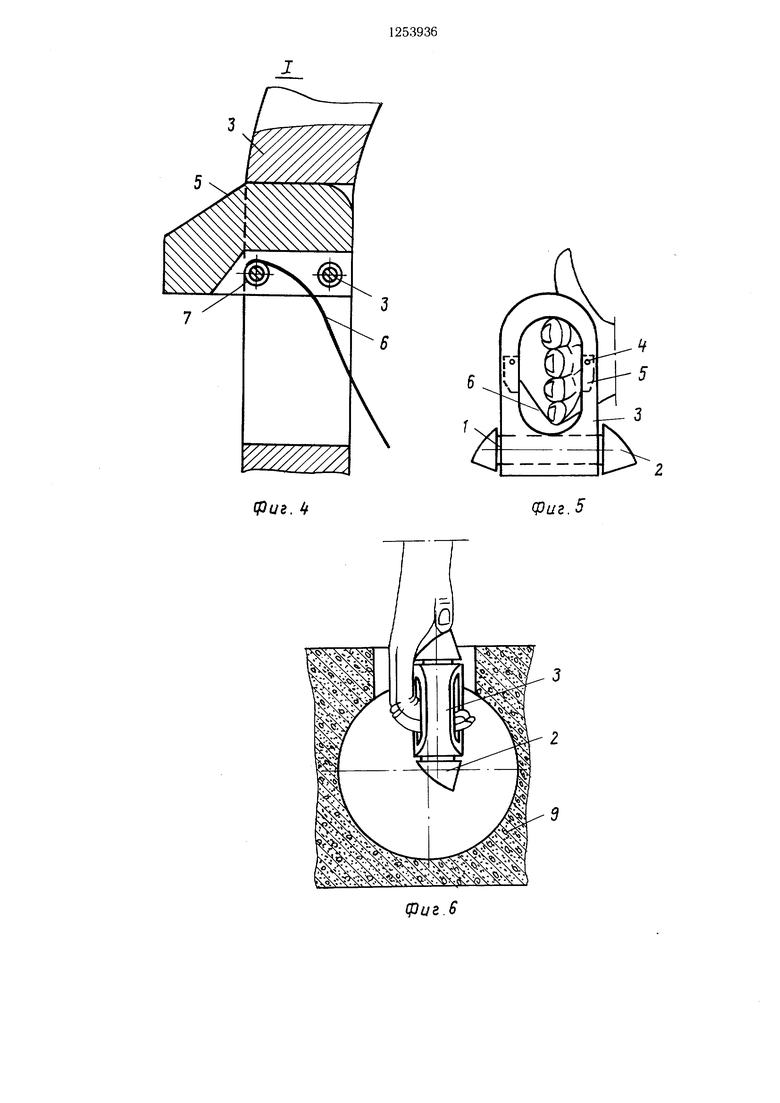
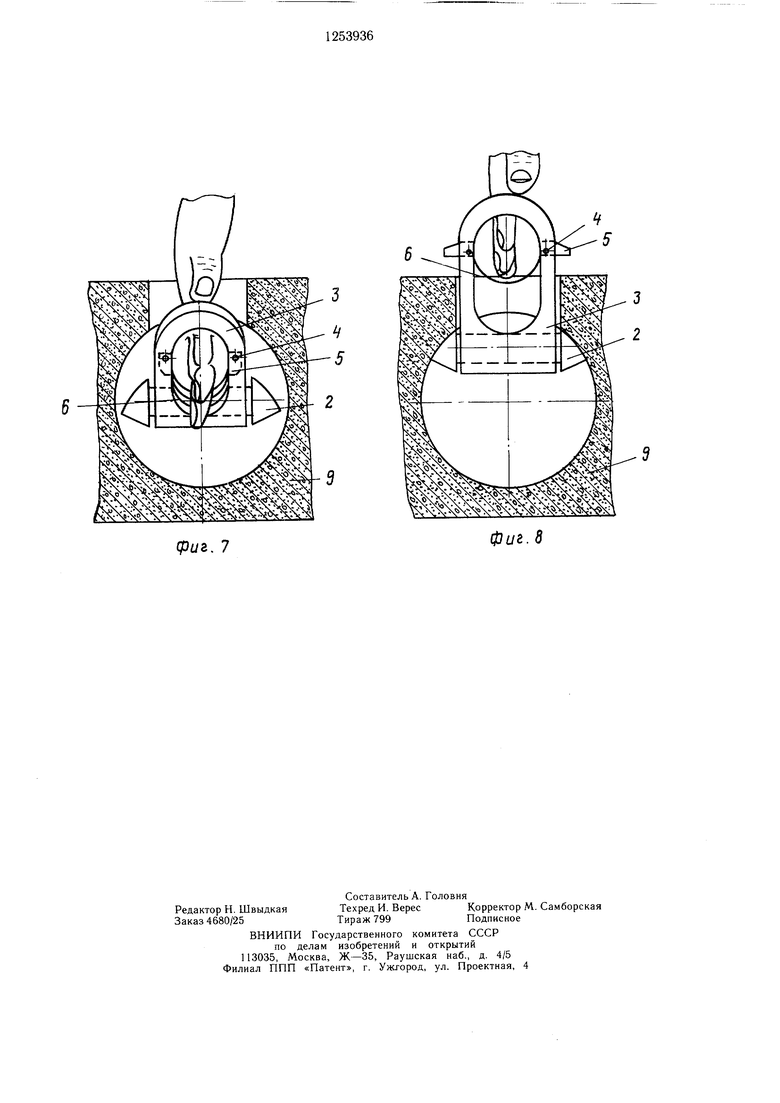
На фиг. 1 изображен захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг 3 - то же, что на фиг. 1, вид сверху; на фиг. 4 -- узел I на фиг. 1; на фиг. 5 - подготовка захвата к установке в рабочее положение; на фиг. 6 - внедрение захвата в полость изделия через монтажный проем; на фиг. 7 - разворот захвата в полости; на фиг. 8 - установка захвата в рабочее положение.
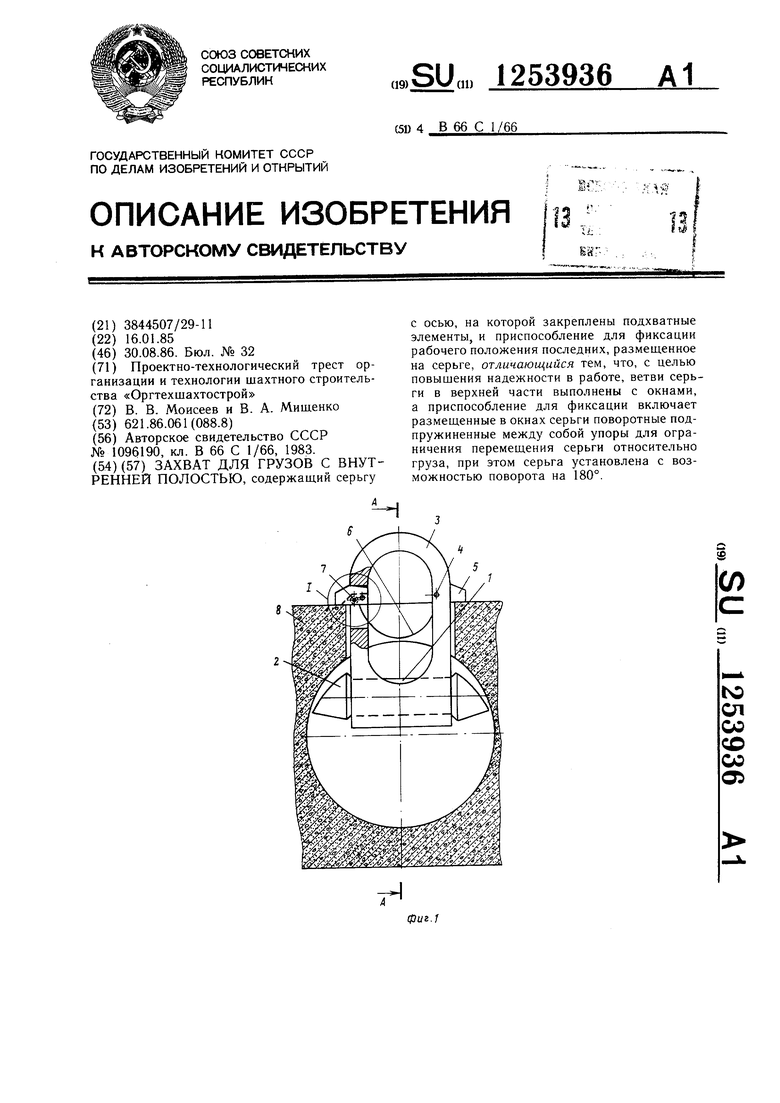
Захват имеет нодхватный элемент 1, представляющий собой ось с опорными площадками 2 на концах, серьгу 3 с цилиндрическим сверлением, куда входит ось подхват- ного элемента. Серьга 3 имеет два прямоугольных окна, куда на осях 4 крепятся упоры 5 фиксатора. Упоры связаны между собой плоской пружиной 6, закрепленной в упорах с помощью осей 7. Пружина сжата и поэтому упоры все время стремятся находиться в положении, показанном на фиг. 1, 4 и 8.
Для исключения кругового вращения серьги относительно оси подхватного элемента на нем установлены ограничители 8. Само строительное изделие обозначено позицией 9.
Захват работает следующим образом.
Для подготовки захвата к установке в
рабочее положение стропальщик заводит
(фиг. 5) кистевую часть руки в серьгу 3,
при этом пружина 6 сжимается, так как расстояние между ушком серьги и пружиной меньше ширины руки, и поворачивает упоры 5 на осях 4. Стропальщик поворачивает серьгу 3 относительно подхватного элемента 1 так, чтобы серьга 3 и опорные площадки 2 лежали в одной плоскости (фиг. 6), для чего сгибает кисть руки, поворачивая захват в положение «на ребро. В таком положении захват заводится в монтажное отверстие вместе с кистью руки. Достигнув полости, стропальщик разворачивает захват (фиг. 7) из положения «на ребро в положение «плашмя. После этого, держа руку в монтажном проеме ребром и с наклоном, поднимает захват за серьгу 3 до упора подхватного элемента в поверхность полости. Поджимая захват вверх, стропальщик, освобождая руку из серьги 3 (фиг. 8), обеспечивает распрямление пружины б и раскрытие упоров 5.
Установив захват, заводит в серьгу крюк грузоподъемного механизма. Для срабатывания упоров при установке и снятии захвата, а также для обеспечения относительного вращения подхватного элемента 1 и серьги 3 при натяжении грузоподъемным механизмом под углом захват, подготовленный к строповке, имеет зазор между под- хватными элементами и поверхностью полости.
Для снятия захвата рука заводится в серьгу с одновременной выработкой зазора, упоры прячутся в окна серьги, рука с захватом опускается в полость, захват разворачивается «на ребро и извлекается из монтажного отверстия.
0
5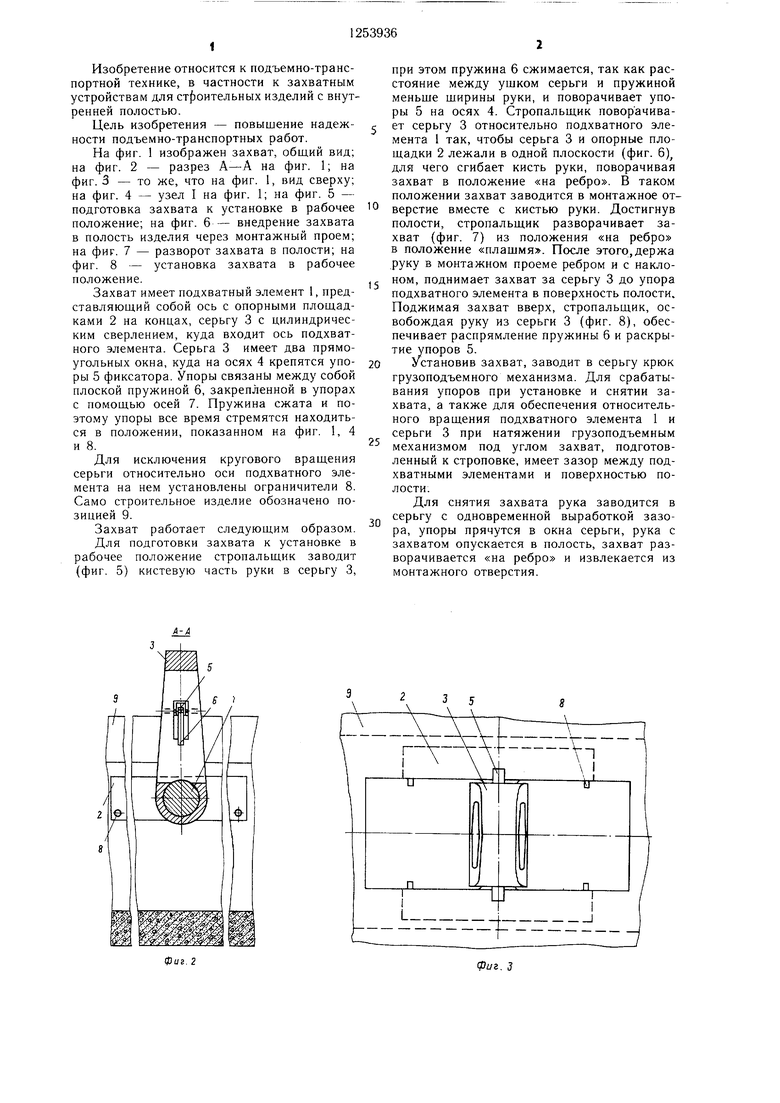
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для строительных изделий с внутренней полостью | 1983 |
|
SU1127839A1 |
| Захватное устройство для строительных изделий с внутренними полостями | 1980 |
|
SU872432A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1990 |
|
SU1749156A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Грузозахватное устройство | 1983 |
|
SU1164191A1 |
| Грузозахватное устройство | 1985 |
|
SU1393748A1 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| Захват-кантователь | 1987 |
|
SU1512914A1 |
| Захватное устройство для строительных изделий с внутренней полостью | 1982 |
|
SU1096190A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
фиг. 3
. tt
Фиг.5
сриг.6
фиг. 7
Фиг. 8
| Захватное устройство для строительных изделий с внутренней полостью | 1982 |
|
SU1096190A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
