Изобретение относится к горной промышленности и предназначено для управления выемочными фронтальными агрегатами в плоскости пласта.
Цель изобретения - повьцпение ма- невренности агрегата в плоскости пласта с одновременным увеличением быстродействия разворота модулей базы между собой.
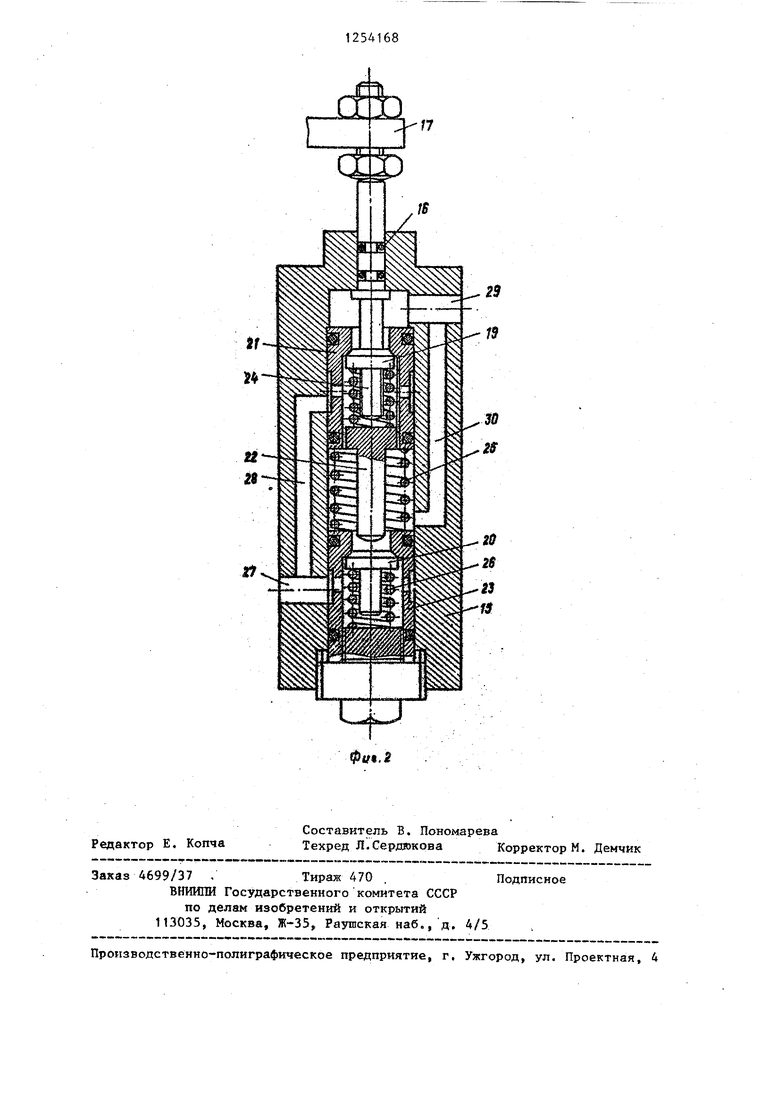
На фиг. 1 изображена схема уст- ройства управления движением выемочного агрегата в плоскости пласта , на фиг. 2 - дросселирующий гидрораспределитель .
Устройство состоит из шарнирно со единенных опорных 1 и промежуточных 2 модулей базы. Гидроцилиндры 3 и 4 предназначены для передвижения соответственно, опорных и промежуточных модулей базы при прямом ходе и секци крепи агрегата при обратном ходе,,
Устройство включает также насосную станцию 5, объемньй гидродозатор в виде регулируемых гндромашин 6 вращательного действия, валы которых механически связаны между собой гидропульт 7 управления, гидроЛинии 8-13.
В соответствующую гидролинию 13 Каждого гидроцилиндра 4 включен дрос селирующий гидрораспределитель 14, корпус 15 которого соединен с модулем 2 базы, а шток 16 взаимодгйству- ef с рычажным датчиком 17 угла относительного поворота промежуточ- ных модулей базы. Параллельно дросселирующему гидрораспределителю 14 подключен обратный гидроклапан 18.
Дросселирующий гидрораспределитель Состоит из двух параллельно включенных в гидролинии 13 гидроклапанов 19 и 20 седла 21 с хвостовиком 22, седла 23, пружин 24-26, каналов 27-30.
Устройство работает следуюп1 м об разом.
При перемещении модулей базы рабочая жидкость от насосной станции 5 через регулируемые объемные гидромашины 6 дозатора и гидропульт 7 управления по гидролиниям 8-10 постпает в поршневые полости гйдроцилин дров 3, При этом жидкость из штоковых полостей гидроцилиндров 3 через гидролинию 12, гидропульт 7 управ- ления поступает в гид;робак насосной станции. Путем изменения рабочего объема гидромашин 6 дозатора .можно
0
5
5
0
0 5
682
обеспечить движение концевых опорных модулей 1 базы с различными скоростями и, следовательно, разворот базы выемочного агрегата в ту или иную сторону. Вместе с тем регулирование объемных гидромашин 6 позволяет корректировать положение опорных модулей отртосительно продольной оси базы выемочного агрегата.
Одновременно от насосной станции 5 через гидропульт 7 управления, гидролинии 11 и 13, дросселирующие гидрораспределители 14 рабочая жидкость поступает в поршневые полости гидроцилиндров 4 перемещения промежуточных модулей 2 базы. При этом рабочая жидкость из штоковых полостей этих гидроцилиндров 4 через гидролинию 12, гидропульт 7 управления поступает в насосную станцию 5. Прямолинейность оси базы в пределах группы модулей базы обеспечивается в результате взаимодействия рычажных датчиков 17 относительно поворота модулей базы и толкателей 16 дросселирующих гидрораспределителей 14. При прямолинейном расположении промежуточных модулей базы рычажные датчики воздействуют на толкатели 16 таким образом, что гидроклапан 19 оказывается открытым и рабочая жидкость через гидролинию 13, каналы 27-29 поступает в поршневые полости гидроцилиндров 4. Если же, например, промежуточный модуль 2 опередит соседний опор- ньм модуль 1 базы, то конец рычажного датчика отодвигаете от корпуса 15 дросселирующего гидрораспределителя в гидроклапан 19 под действием пр окины 24, герметизирует седло 21, перекрывая доступ жидкости в гидро- дилиндр 4, снижая скорость перемещения его штока до полной остановки. В результате произойдет выравнивание оси базы, В случае нарастающего отставания промежуточного модуля 2 базы относительного опорного модуля 1 толкатель 16 перемещает клапан 19 до упора его хвостовика,22 в основание седла 21, Последнее начинает перемещаться вдоль оси гидрораспределителя, сжимая пружину 25. При этом хвостовик 22 воздействует на клапан 20, который, сжимая пружину 26, отделяется от седла 23 и открывает доступ рабочей жтадкости из канала 27 в канал 30 и далее в канал 29. В результате существенно увеличивается
3125Д
суммарная площадь отверстий для прохода жидкости через гидроклапаны, что приводит к соответствующему увеличению скорости перемещения штока гидрог цилиндра 4 и ускоренному выравнива- ; ним продольной оси базы. Аналогично взаимодействуют рычажный датчик и шток дросселирующего гидрораспределителя, размещенные на соседних промежуточных модулях базы. Обратные О гидроклапаны 1& обеспечивают пропускание жидкости при обратном ходе гидроцилиндров 4.
Поскольку скорость перемещения од-Т5 ного из концевых гидроцилиндров 3 , опорного модуля 1 базы легко может быть уменьшена вплоть до нулевой,
1684
возможен интенсивный разворот выемочного агрегата с минимальным радиусом,равным длине базы, что повышает маневренность агрегата. Вместе с тем управляющие воздействия подаются не только на концевые гидроци- линлры, но и на гидроцилиндры опорны модулей, расположенных по длине базы что эквивалентно уменьщению длины базы агрегата до длины одной группы модулей базы. В результате возрастает быстродействие устройства управления движением выемочного агрегата в плоскости пласта. Возрастание быстродействия достигается за счет вида расходной характеристики дросселирующего распределитепя, близкой к релейной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического поддержания прямолинейности базовой балки | 1980 |
|
SU877060A1 |
| САМОЗАГРУЖАЮЩИЙСЯ РАЗБРАСЫВАТЕЛЬ УДОБРЕНИЙ | 2008 |
|
RU2363133C1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Привод горной машины | 1990 |
|
SU1747689A1 |
| Гидросистема секции механизированной крепи | 1988 |
|
SU1587211A1 |
| РАБОЧИЙ ОРГАН К РАЗБРАСЫВАТЕЛЮ УДОБРЕНИЙ ИЗ КУЧ | 1999 |
|
RU2164735C2 |
| Устройство управления базой очистного агрегата в профиле пласта | 1986 |
|
SU1425344A1 |
| Гидропривод фронтально-перекидного погрузчика | 1982 |
|
SU1060561A1 |
| Рулевое управление транспортного средства | 1984 |
|
SU1217709A1 |
| Гидропривод фронтального погрузчика | 1986 |
|
SU1583553A1 |

Редактор Е. Копча
Составитель В. Пономарева
Техред Л.Сердлкова Корректор М. Демчик
Заказ 4699/37 . Тираж 470 .
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ф|/«.2
Подписное
| Устройство для управления базой фронтального агрегата | 1978 |
|
SU742602A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического поддержания прямолинейности базы очистного комплекса | 1974 |
|
SU451852A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
