Изобретение относится к устройствам для перемещения и ориентации различных деталей и может быть использовано для работы в любой контролируемой атмосфере: вакууме, газонаполненных и агрессивных средах, а также может быть использовано в электровакуумном производстве в составе технологических камер для изготовления электровакуумных и фотоэлектронных приборов методом переноса.
Целью изобретения является повын1еиие долговечности устройства для перемещения деталей.
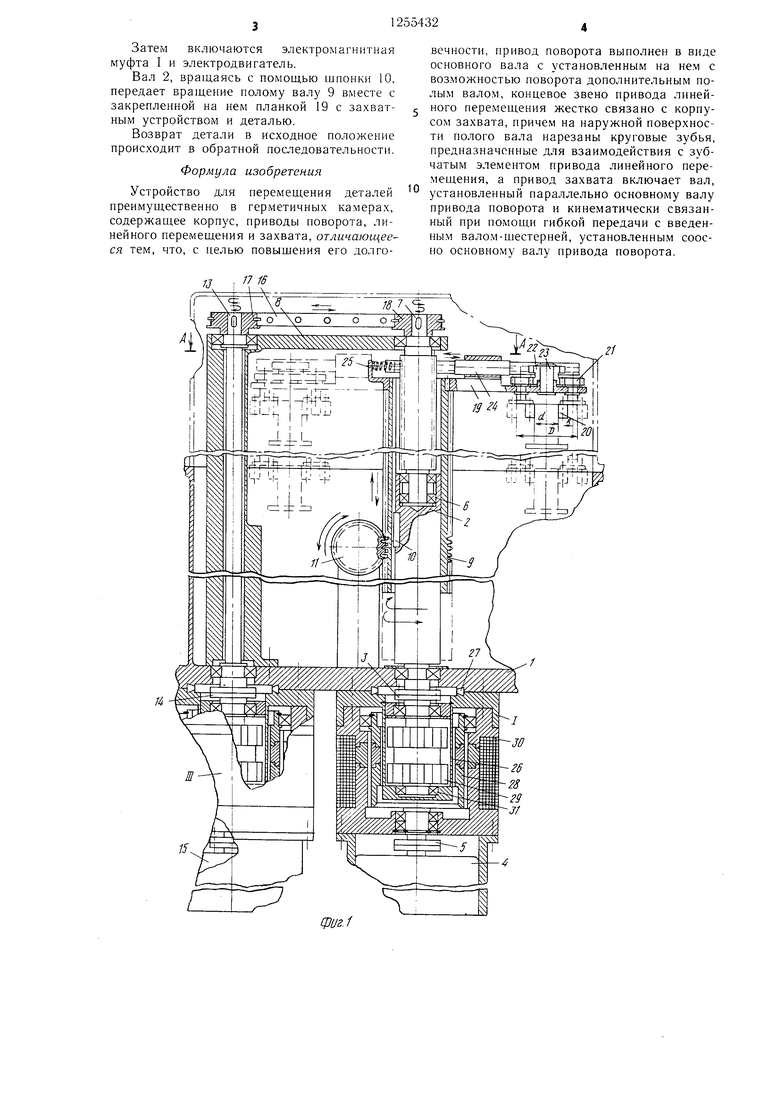
На. фиг. 1 показано предлагаемое устройство, общий вид, разрез; на фиг. 2 - разрез А-А на фиг. 1.
Устройство состоит из корпуса 1, в котором на подн1И П1иках сг оптирован основной вал 2. На одном конце вала 2 установлена муфта 3, соединяющая его с первым герметичным вводом привода поворота, приводимым во вращение электродвигателем с редуктором 4 через муфту 5. На другом конце вала 2 в его торцевом гнезде на поднщнни- ках 6 установлен вал-шестерня 7, соединенный через опорный нодпщпник с Г-образной стойкой 8.
С валом 2 сонряжены нолый вал 9 и Н1ионка 10. Полый вал 9 выполнен в виде круглой рейки по наружному диаметру вдоль образующей. Полый вал 9 ки1-:ематически связан через шестерню 11 с вторым герметичным вводом линейного перемещения, приводимым во вращение электродвигателем 12 с редуктором (фиг. 2).
В Г-образной стойке 8 корпуса 1 смонтирован вал 13 параллельно основному валу 2. Один конец вала 13 соединен через .муфту 14 с третьим герметичным вводом привода захвата, приводимым во вращение электродвигателем 15 с редуктором. Другой конец вала 13 кинематически связан, например с номогцью бесконечной перфорированной стальной ленты 16 с валом-н1естерией 7. Для перемещения ленты 16 па валу 13 смонтирован ведущий щкив 17, на валу-щестерне 7 смонтирован ведомый пжив 18. Шкивы 17 и 18 снабжены пггифтамп, предотвращающими проска.пьзывание ленты 16 при ее движении.
Захватное устройство смонтировано на планке 19, прикрепленной к торцу полого вала 9. Оно состоит из трех выступающих за плапку 19 равпомерно расположенных по окружности эксцентриковых валиков 20, снабженных шестернями 21, кинематически связанными с одним из зубчатых венцов блок-1пестерии 22, свободно устаповленый на оси 23.
Другой зубчатый венец блока-шестерни 22 кинематически связан с валом-шестерней 7 через подпружиненную рейку 24. Пружина 25 обеспечивает необходимое усилие зажима захватываемых деталей.
Все три гер.метичных ввода, смонтированные в корпусе 1, выполнены в виде электромагнитных экранированных синхронных зубчатых муфт I - III вращательного движения,
каждая из которых обеспечивает передачу вращения ведомому звену через неподвижную герметичную немагнитную стенку - цилиндрические экраны 26 толщиной 0,5мм. Экран 26 унлотняется относительно или- ты корпуса 1 прокладкой 27 и крепится с помощью фланцевого соединения. Муфта состоит из наружной магнитной полумуфты 28 и внутренней магнитной полумуфты 29. Полу.му(Ьты имеют одинаковое число зубьев. Магнитный ноток, создаваемый неподвижной электромагнитной катупжой 30, замыкается через зубья наружной и внутренней нолумуфт, образуя их сненление. Крутящий момент от электродвигателя с редук- гором 4 нередается на наружную полу- муфту 28, нри этом магнитный поток, создаваемый катущкой 30, заставляет вращаться внутреннюю нолумуфту 29 синхронно наружной полумуфте 28. Внутренняя нолумуфта 29 находящаяся в рабочем пространстве технологической камеры, врапгается в подн1инниках 31.
Устройство работает следующим образом.
При включении электромагиитной муфты III и электродвигателя 15 вращение передается через муфту 14 валу 13. При повороте вала 13 поворачивается шкив 17, и с помощью ленты 16 поворачиваются шкив 18 и вал-шестерня 7, который перемещает сцепляюц;уюся с ним рейку 24. Рейка 24 поворачивает блок-шестерню 22 и сцепляющиеся с ней щестерни 21, установленные на
планке 19, обеспечивая синхронный разворот трех зажи.мных эксцентриковых валиков 20 по радиусу R. Пощтучный самоцентрирующий зажим обрабатываемых деталей осуществляется от пружины 25 через поднружиненную рейку после выключения электромагнитной муфты 111.
Величина угла поворота вала 13 определяется датчиками положения, установленными в корпусе I.
После захвата детали осуществляется ее
подъем или опускание на некоторую величину при помощи реечиой передачи.
Для этого включаются электромагнитная муфта II и электродвигатель 12 (фиг. 2).
Шестерня 11, вращаясь, неремещает полый вал 9, а вместе с ним нланку 19 с захватным устройством и деталью по валу 2. Величина перемещения детали определяется датчиками иоложения, установленными в корпусе 1. Для вращения детали вокруг оси вала 2
или ее поворота на заданный угол вокруг той же оси выключается электродвигатель, при этом электромагнитная муфта П остается включенной.
Затем включаются электромагнитная муфта I и электродвигатель.
Вал 2, вращаясь с помощью шпонки 10, передает вращение полому валу 9 вместе с закрепленной на нем планкой 19 с захватным устройством и деталью.
Возврат детали в исходное положение происходит в обратной последовательности.
Формула изобретения
Устройство для перемещения деталей преимущественно в герметичных камерах, содержащее корпус, приводы поворота, линейного перемещения и захвата, отличающееся тем, что, с пелью повышения его долго
вечности, привод поворота выполнен в виде основного вала с установленным на не.м с возможностью поворота дополнительным полым валом, концевое звено привода линейного перемещения жестко связано с корпусом захвата, причем на наружной поверхности полого вала нарезаны круговые зубья, предназначенные для взаимодействия с зубчатым элементом привода линейного перемещения, а привод захвата включает вал, установленный параллельно основному валу привода поворота и кинематически связанный при помощи гибкой передачи с введенным вало.м-шестерней, установленным соос- но основному валу привода поворота.
сриг-1
7
фиг. 2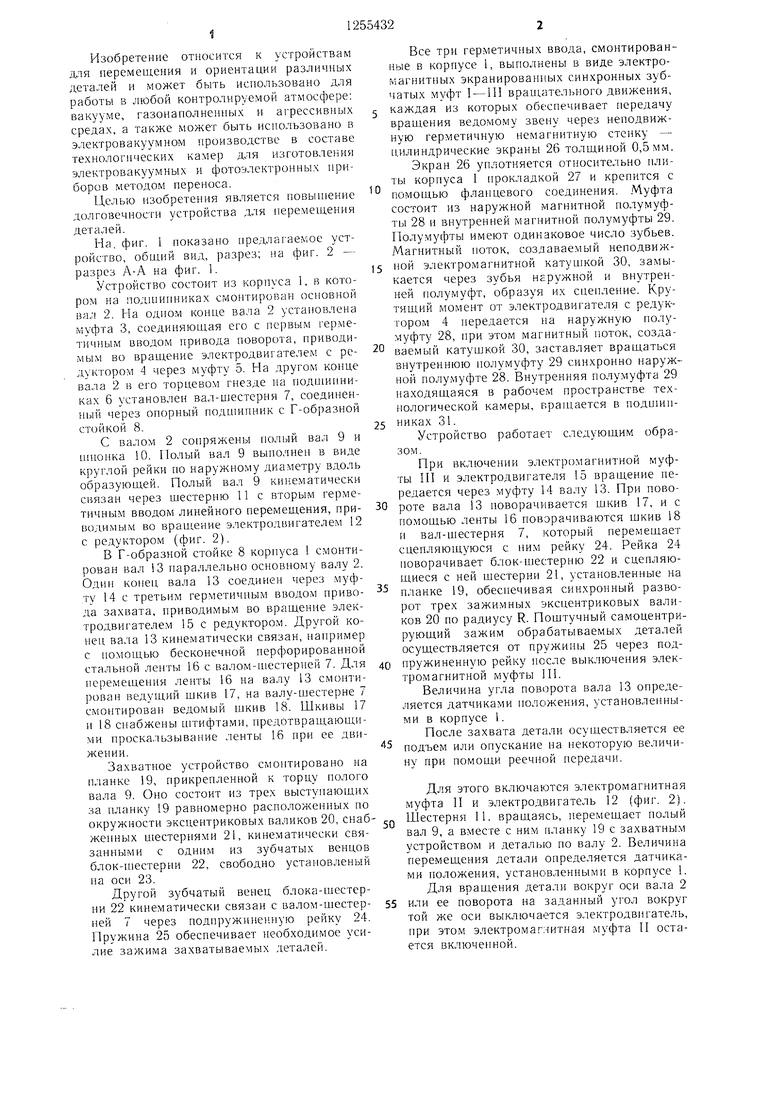
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| Автомат универсально-гибочный, штамповочный, модульного типа | 1989 |
|
SU1813585A1 |
| СТАНОК ДЛЯ НАРЕЗАНИЯ ЗУБЬЕВ КОНИЧЕСКИХ КОЛЕС | 1973 |
|
SU390703A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Устройство для ультразвуковой очистки деталей | 1985 |
|
SU1331596A1 |
| Поворотно-делительное устройство | 1984 |
|
SU1168388A1 |
| Стол многоцелевого станка для пятисторонней обработки детали | 1982 |
|
SU1077750A1 |
| Устройство для перемещения запечатываемого материала | 1975 |
|
SU654456A1 |
| Пресс для монтажа и демонтажа узлов | 1988 |
|
SU1574426A1 |
Изобретение относится к устройствам для пееремещения и ориентации различных деталей и может быть использовано для работы в любой контролируемой атмосфере: вакууме, агрессивных средах, в технологических камерах по изготовлению ЭВП .методом переноса. Цель изобретения - повышение долговечности. Устройство позволяет перемещать детали на большие расстояния с вращением вокруг центральной оси и обеспечивает дистанционное управление захватом без нарушения герметизации среды. Для этого оно снабжено основным валом, смонтированным в Г-образной стойке корпуса. Один конец основного вала соединен с первым герметичным вводом привода поворота, выполненным в виде электромагнитной экранированной синхронной муфты, на другом конце основного вала установлен с возможностью поворота полый вал, который через шестерню связан с вторым герметичным вводом привода линейного переме- ц:,ения. Привод захвата выполнен в виде вала, установленного параллельно основному валу. Один конец вала соединен с третьим герметичным вводом привода захвата, а другой конец кинематически связан при помощи бесконечно перфорированной стальной ленты с валом-шестерней. Последний установлен соосно основному валу и через подпружиненную рейку, установленную на планке, связан с захватным устройством, состоящим из трех выступающих из планки равномерно расположенных по окружности эксцентриковых валиков, снабженных шестернями, кинематически связанными с одним из зубчатых венцов блок-шестерни, свободно установленной на оси. 2 ил. S (Л ю СП СП 4i 00 1ч:)
| Устройство для перемещения деталей | 1979 |
|
SU903108A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
