(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН ПРОМЫШЛЕННОГО ГОБОТА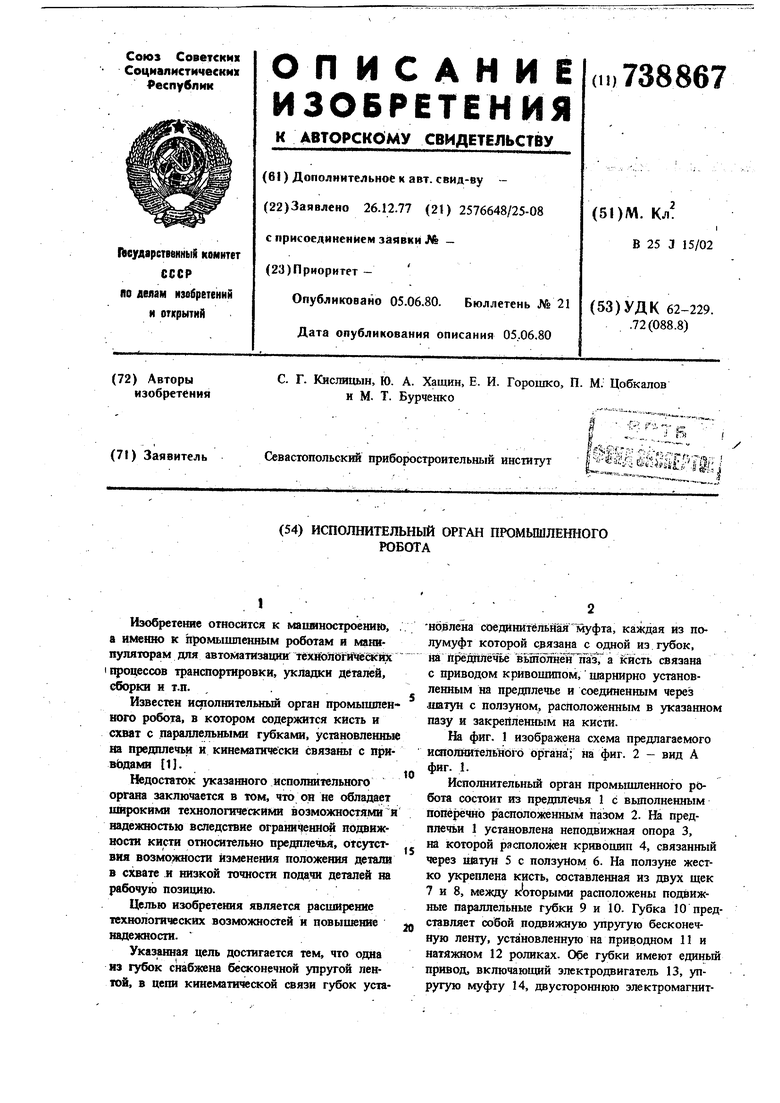

| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Исполнительный орган промышленного робота | 1980 |
|
SU918088A2 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| Очувствленный схват манипулятора | 1979 |
|
SU804427A1 |
| Промышленный робот | 1978 |
|
SU847617A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| Схват | 1977 |
|
SU659377A1 |
,1
Изобретение относится к машиностроенин), . а именно к промышленным роботам и манип)гляторам для автоматизации Т6х ол6гйче ж1к I процессов транспортировки, укладки деталей, сборки и т.п. ,.
Известен ишолнителышй орган промышленного робота, в котором содержится кисть и схват с параллельными губками, установленные на предплечьи и кинематически связаньт с привЬдами 1.
Недостаток указанного исполнительного органа заключается в том, что оя не обладает широкими техиологическими возможностями и надежностью вследствие ограниченной подаижности кисти относительно предплечья, отсутствия возможности изменения положения детали в охвате .и низкой точности подачи деталей на рабочую позицию.
Целью изобретения является расширение технологических возможностей и повышение надежности.
Указанная цель достигается тем, что одна из губок снабжена беосонечной упругой лентой, в цепи кинематической сжязи губок установлена соединительная муфта, каждая из полумуфт которой связана с одной из.губок, на п1редашёчье вШ«этаё11Г11аз7а кисть связана с приводом кривошипом, шарнирно установленным на предплечье и соединенным через аитун с ползуном, расположенным в указанном пазу и закрепленным на кисти.
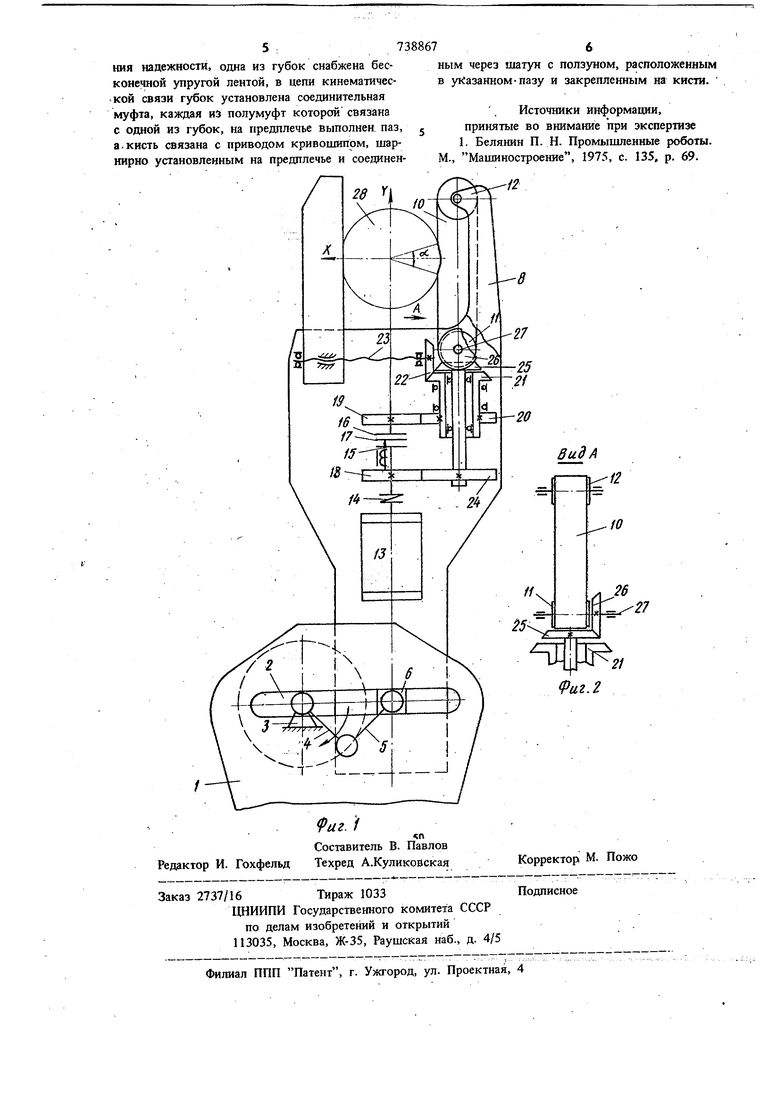
На фиг. 1 изображена схема предлагаемого исяолнительйбгб органа:; на фиг. 2 - вид А фиг. 1.
10
Исполнительный орган промышленного pdбота состоит из предплечья 1 с выполненным поперечно расположенным пазом 2. На предплечьи 1 установлена неподвижная опора 3, на которой располо5кен кривошип 4, связанный
15 через шатун 5 с ползуном 6. На полззше жестко укреплена кисть, составленная из двух щек 7 и 8, между которыми расположены подвижlaie параллельные губки 9 и 10. Губка 10 представляет собой подвижную упругую бесконеч30ную ленту, установленную на приводном 11 и натяжном 12 роликах. Обе губки имеют единый привод, включающий электродвигатель 13, упругую муфту 14, двустороннюю электромагнитную соединительную муфту, содержащую полумуфты 15 и 16 и расположенный между ними фрикционный диск 17. На полумуфтах 15 и 16 жестко укреплены цилиндрические зубчатые шестерни 18 и 19, Шестерня 19 кинематически
связана через цилиндрические шестерню 20, укрепленную на полом валу конической шестерни 21, и через коническую шестерню 22, закрепленную на винте 23, - с подвижной губкой -9. Шестерня 18 кинематически связана через ци- ю .линдрическую шестерню 24, укрепленную на
валу когшческой шестерга 25, и через коническую шестерню 26, установленную на валу 27, жестко связанным с приводным роликом 11, с губкой 10. Конические передачи привода. 15 губок 9 и 10 между которыми расположена деталь 28, скомпонованы так, что вал конической шестерни 25 проходит внутри полого вала конической шестерни 21.
Исполнительный орган работает следуюшим 20 образом.
Предплечье 1 робота выводится на позицию расположе шя детали 28. По сигналу датчиков наличия детатш (на чертеже условно не показаны) включается электродвигатель 13 и одновременно 25 подается питание на электромагнитную муфту так, что ее фрикционный диск 17 включает в работы полумуфту 16. В результате этого крутящий момент передается от электродвигателя 13 через муфту 14 и полумуфту 16, через зо цилиндрическую передачу с шестернями 19, 20 и через кош1ческую передачу с шестернями 21, 22 на винт 23, который, вращаясь, перемещает расположенную на нем губку 9. При этом осуществляется захват детали 28 и зажим ее до 35 включения датчика предельного усилия зажима
детали. Упомянутый датчик, таким образом, , отключает электродйигатеЛь 13 и соответствующую полумуфту электромагнитной муфты. . В результате обеспечивается надежный и в то 49 же время мягкий захват и удержание детали 28 между жесткой 9 и упругой 10 губками. Последней обеспечивается соответствующий определенному усилию зажима детали свой угол о: обхвата детали. После захвата детали 28 она 45 переносится исполнительным органом. на рабочую позицию, где необходимо ее точно установить или расположить относительно другой детали. При этом предплечье 1 осуществляет грубое выведение (подачу) детали 28 на рабо- 50 чую позрщию. Точнее выведение по одной из координат, например по координате х в горизонтальной плоскости, обеспечивается на рабо-, , чей позиции по сигналу соответствующего следящего датчика, который включает привод55 кривошипа 4. Перемещение (поворот) последнего через шатун 5 и прлзун 6 обеспечивает поступательное перемещение кисти с удерживаемой деталью 28 по координате х, перпендикулярной оси предплечья 1 до отключения привода кривошипа 4 по сигналу упомянутого датчика. Датчики, отслеживаюгдие точность расположения детали по другой координате у, включают электродвигатель 13 и электромагнитную муфту так, что ее фрикционный диск 17 включает в работу полумуфту 15. В результате этого крутящий момент от электродвигателя 13 через муфту 14 и полумуфту 15, через цилиндрическую передачу с шестернями 18, 24 и через коническую передачу с шестернями 25 и 26 вал 27 передается на приводной ролик 11 губки 10. Последняя при движении леиты передает крутящий момент на деталь 28, которая поворачивается в схвате и одновременно перемещается пост)шательно между губками 9 и 10 и таким образом обеспечивается перемещение детали по другой, вдоль оси кисти робота, координате у. Реверсивное включение электродвигателя 13 позволяет подвижной упругой лентой перемещать и поворачивать деталь 28 по данной координате в двух противоположных направлеНИЯ). .
Такое перемещение происходит до момента обеспечения требуемого положения детали на рабочей позиции, после чего датчики осуществляют отключение привода перемещения детали по данной координате. Затем по соответствующей команде предплечье 1 совершает опускание детали 28 на рабочую позицию, установку ее или сборку, после чего в систему управления подается сигнал на освобождение детали 28, т.е. отведение губки 9. При таком сигнале обеспечивается включение полумуфты 16 электромагнитной муфты и реверсивное включение электродвигателя 13. При этом губка 9 возвращается в исходное положение и т.д.
Благодаря наличию губки с подвижной упругой лентой обеспечивается повышение надежности удержания детали в схвате за счет повышения степени обхвата детали с лентой одной из губок. Предлагаемьш исполнительньш орган позволяет; осуществлять мягкий захват детали и манипулировать удерживаемой деталью в схвате, т.е. удерживать и одновременно обеспечивать подвижность ее в губках, что дает возможность повысить точность позициинирования или относительного ориентирования детали при сборке или укладке деталей иа рабочей позиции.
Формула изобретения
Исполнительный орган промышленного робота, содержащий установленную на предплечье кисть со схватом, несущим параллельные губки цепи кинематических связей и привод, о т л ичающийся тем, что, с це}1Ью расширения технологических возможностей и повыше
