Изобретение относится к машиностроению и может быть использовано в робототехнике для сборки различных миниатюрных изделий.
Цель изобретения - повышение точности позиционирования путем совмещения операции по коррекции шага каретки с ее основ ньш перемеш,ением.
На фиг. 1 изображена схема устройства, обш.ий вид; на фиг. 2 - то же, при отведении одной из ветвей передачи ползуном с роликом, кинематически связанным с дополнительным шаговым двигателем.
Передача содержит шаговый двигатель 1, установленный на его валу ведущий 2, промежуточные 3 и 4 и ведомый 5 шкивы, охватывающие последние зубчатые ремни 6 и 7. С ветвью зубчатого ремня 7 жестко связана каретка 8, установленная на направляющих 9. С внутренней стороны зубчатого ремня 6 установлен зубчатый ролик 10, закрепленный на ползуне 11, который кинематичес ки связан винтовой передачей с дополнительным щаговым двигателем 12. Каретка 8 и ползун 11 имеют датчики 13 и 14 исходного положения.
Устройство работает следующим образом.
Для перемещения каретки 8 из исходного положения, определяемого точкой А, в заданную точку Б сначала производится расчет количества импульсов Nj шагового перемещения каретки 8 с дискретностью ДЬ. Для этого расстояние L между точками А и Б делится на величину дискретности ДЦ. Полученное количество импульсов округляется до целого в сторону уменьшения, и уточняется путь каретки по формуле
L, AL,-N.
Оставшийся отрезок L-Li будет меньше дискретности, т.е. .
Аналогично производится расчет количества импульсов Ng для отрезка L. Для этого задаются величиной дискретности AL перемещения каретки на отрезке L, например 0,001 мм. Длина отрезка делится на величину дискретности л L, полученное количество импульсов Nj округляется до целого, и путь каретки уточняется по формуле
L, AL,-N,.
Таким образом, величина перемещения L каретки 8 из точки А в заданную точку Б определяется как сумма перемещений L и Ц:
L Li+ L2 AL,Ni . Количество импульсов Njx шагового дви гателя 1 определяется с учетом передаточного отношения редачи:
ip зубчато-переменной пеКоличество
NisB Nt-if. импульсов N
ад
шагового
двигателя 12 определяется с учетом передаточного отношения i винтовой величины и на L:
N
глб
N,-i;
где 1,
Л
.д - передаточное отношение деформации ремня при его отведении роликом 10.
Передаточное отношение 1д деформации ремня равно отношению величины отведения h ремня 6 к величине смещения I начального диаметра D; промежуточного щки- ва 3:
1,
1.
Величина смещения I ремня определяется во формуле:
{-ос а
360
где сс- угол
поворота промежуточного щкива 3 при отведении ветви ремня 6 на величину h.
Шаговому двигателю 1 задается уставка импульсов.
При включении щагового двигателя 1 каретка 8 перемещается к заданной точке Б. При этом ролик 10 находится в исходном положении и свободно вращается на своей оси, не создавая в ветви ремня 6 дополнительного натяжения. Движение каретки происходит с дискретностью Д Lj. В процессе отработки уставки Ы,дв двигателем 1 включается двигатель 12, которому задана уставка импульсов. При этом винтовая передача перемещает ползун 11 с роликом 10, который оттягивает ветвь ремня 6 на величину h, в результате чего натяжение ремня б увеличивается. Согласно закону Гука натяжение ремня 6 приводит к удлинению, которое пропорционально величине натяжения в пределах допускаемой упругой деформации корда ремня. Удлинение ремня 6 приводит к некоторому повороту шкива 3, а с ним я шкива 4 на некоторый угол об, что в свою очередь ведет к дополнительному перемещению ремня 7 и каретки 8 на требуемую величину
L.
Таким образом, на перемещение каретки от двигателя 1 с дискретностью л L производится наложение перемещения от двигателя 12 с дискретностью А Lj, в результате чего каретка 8 приходит в заданную точку Б с требуемой точностью.
Перемешение каретки 8 в исходное положение, определяемое датчиком 13, происходит за счет реверса двигателя 1. Во время перемешения каретки 8 ползун 11 с роликом 10 также возвращается в исходное положение, определяемое датчиком 14, путем реверса шагового двигателя 12. При этом ветвь ремня 6, взаимодействующая с роликом 10, ослабляется и возвращается в исходное состояние за счет сил упругости
корда ремня 6, так как напряжение в корде не выходит за допустимые пределы. Ремень 6 восстанавливает свою первоначальную длину, ликвидируя приращение углас и приращение координаты каретки Ц. Каретка возвращается в исходное положение с прежней высокой степенью точности.
Далее щаговому двигателю 1 и двигателю 12 з адаются соответственно другие уставки Ni« , NiAB и циклы повторяются.
Таким образом, коррекция щага может быть рассчитана в любой точке диапазона перемещения каретки, что повыщает точность ее позиционирования в передаче.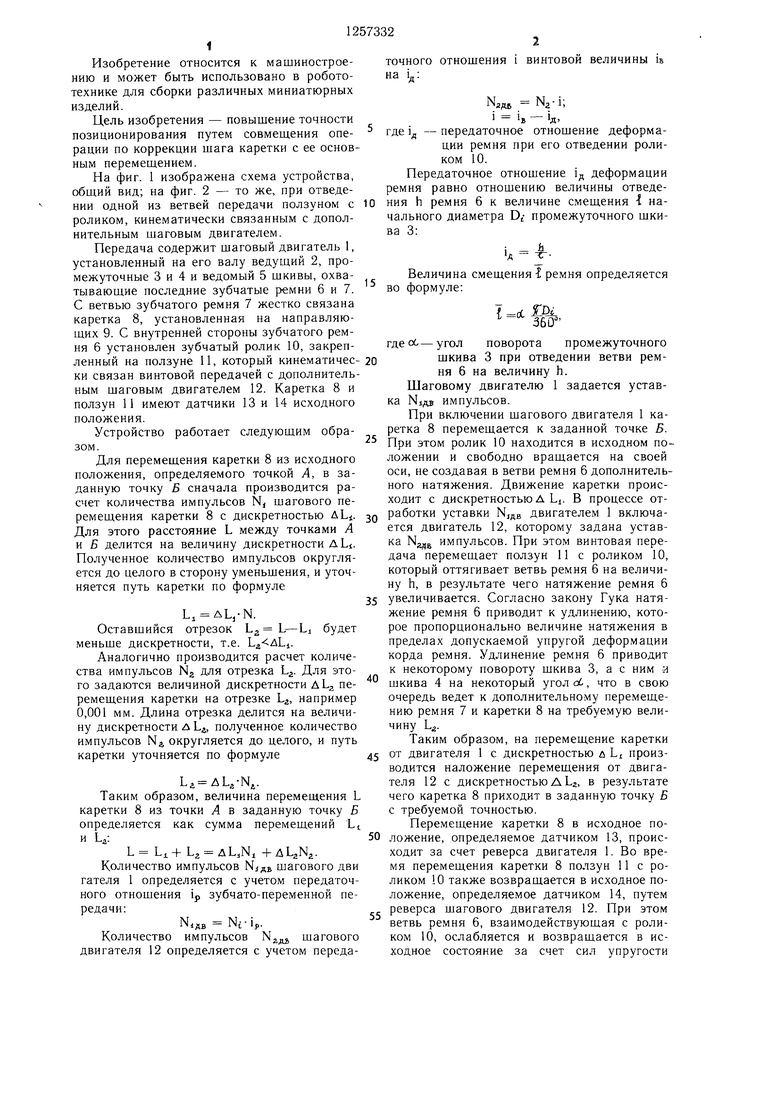
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2019 |
|
RU2742099C2 |
| Способ образования мотков проволокии уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1975 |
|
SU844092A1 |
| Устройство для контроля усилия натяжения ременной передачи | 1983 |
|
SU1137356A1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ В ТРЕХ НАПРАВЛЕНИЯХ | 1991 |
|
RU2015102C1 |
| Привод каретки факсимильного аппарата | 1980 |
|
SU902313A1 |
| Координатный стол | 1988 |
|
SU1574430A2 |
| Привод для преобразования непрерывного вращательного движения в импульсивное вращение | 1989 |
|
SU1664672A2 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ НАСТИЛОВ ПОЛОТЕН ИЗ РУЛОННЫХ МАТЕРИАЛОВ | 2010 |
|
RU2433946C1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ ОКОН И ДВЕРЕЙ | 2020 |
|
RU2745981C1 |
| Канатная трелевочная установка | 1975 |
|
SU578211A1 |

8
| Патент США № 4088034, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Патент США № 4084681, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| ГЛУШИТЕЛЬ | 2007 |
|
RU2335645C1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "СОЛЯНКА С МЯСОМ" | 2011 |
|
RU2459507C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
