Изобретение относится к спорту, в частности к устройствам для подготовки пловцов.
Цель изобретения - повышение эффективности тренировки.
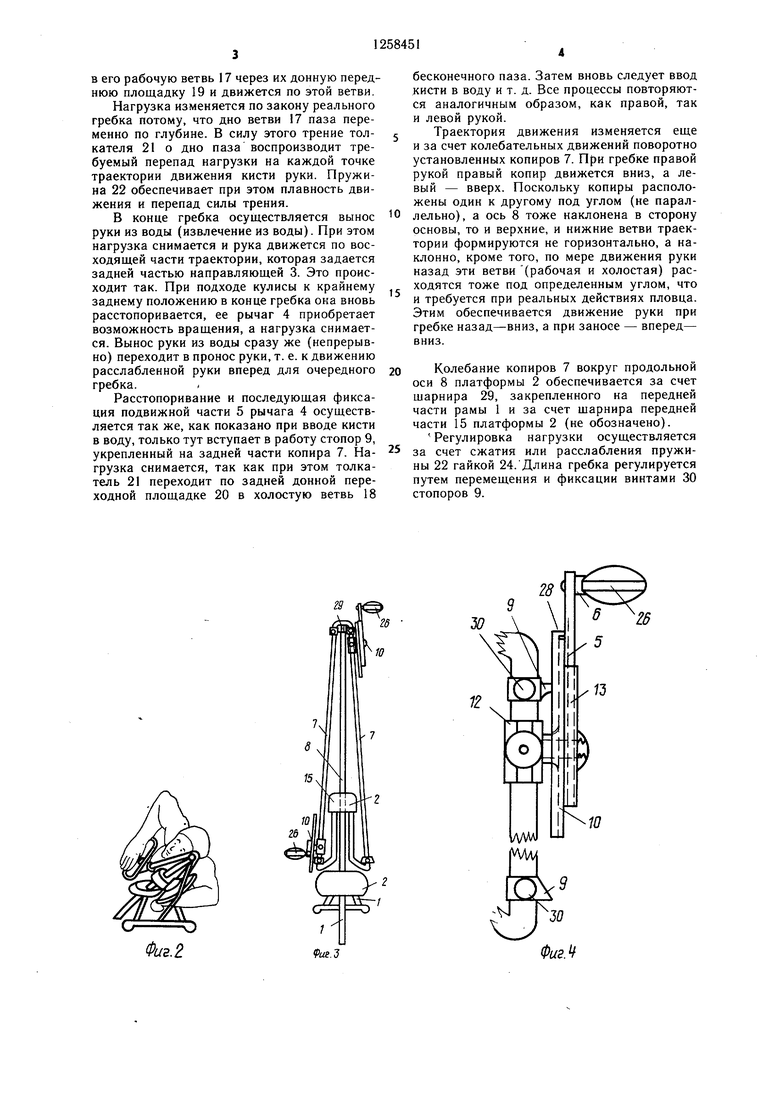
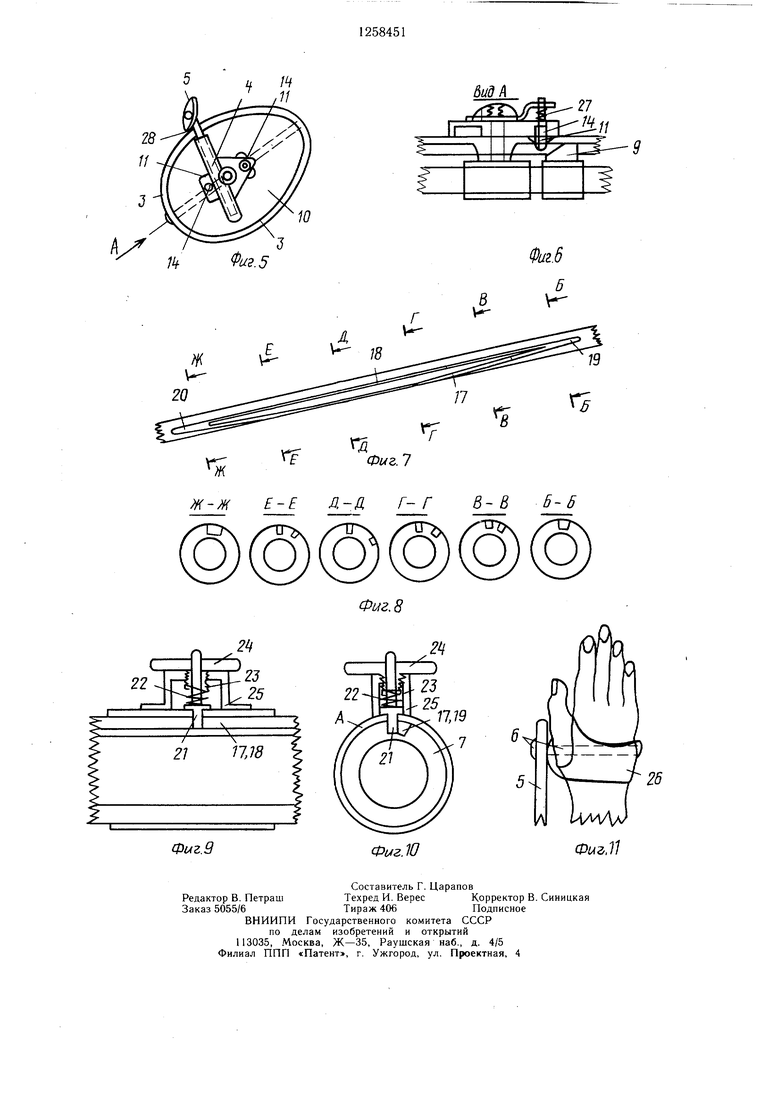
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же, вид спереди; на фиг. 3 - то же, вид сверху; на фиг. 4 - правая подвижная кулиса, вид сверху; на фиг. 5 - то же, вид сбоку; на фиг. 6 - вид А на фиг. 5; на фиг. 7 - правая направляющая; на фиг. 8 - сечения Б-Б - Ж-Ж на фиг. 7; на фиг. 9 - тормозная муфта, продольный разрез; на фиг. 10 - то же, поперечный разрез; на фиг. 11 - правая рукоятка с крепежным ремнем.
Устройство для обучения плаванию содержит установленную на раме 1 платформу 2, параллельные замкнутые направляющие 3 с телескопическими рычагами 4, внутренние части 5 которых несут рукоятки 6 и установлены с возможностью взаимодействия с направляющими 3, средства для воспроизведения реального характера нагрузки, каждое из которых включает копир 7, установленный сбоку платформы с возможностью поворота относительно оси 8, со стопорами 9 на концевых участках и кулису 10 с двумя диаметрально противоположными отверстиями 11 и тормозной муфтой 12. Направляющие 3 и телескопические рычаги 4 с рукоятками б смонтированы на кулисах 10, наружные части 13 телескопических рычагов 4 имеют подпружиненные пальцы 14 для размещения в отверстиях 11 кулисы и взаимодействия со стопорами 9 копиров, а каждая тормозная муфта 12 установлена на соответствующем копире 7 с возможностью перемещения от усилия пловца.
Платформа 2 состоит из двух частей 15 и 16, передняя (15) из которых установлена с возможностью поворота относительно оси 8. При этом копиры 7 закреплены на поворотной части 15 платформы 2.
Каждый копир 7 имеет бесконечный паз с двумя ветвями: тормозной (нагрузочной) 17 и холостой 18. Обе ветви соединяются между собой передней 19 и задней 20 переходными площадками. Глубина паза в тормозной ветви 17 - переменная для создания нагрузки торможения, характерной для реального гребка в воде, а сама ветвь имеет кривизну (фиг. 7 и 8). Глубина п аза в холостой ветви 18 - постоянная, эта ветвь прямолинейна и расположена вдоль оси копира 7. На каждой тормозной муфте 12, насаженной на соответствующий копир 7, смонтирован подпружиненный толкатель 21, входящий в бесконечный паз. Пружина 22 толкателя упирается верхним концом в опорную пяту 23 регулировочной гайки 24, ввинченной в резьбовое отверстие опорной дужки 25 муфты. Нижним концом пружина 22 упирается в толкатель 21. Рукоятки 6 снабжены крепежными ремнями 26.
Устройство работает следующим образом.
Пловец-ложится на часть 16 платформы
тазом, а грудью - на поворотную часть 15
платформы, вставляет кисти рук в крепежные ремни 26 и накладывает их ладонями на рукоятки 6. Далее он работает руками так, как при реальном плавании. При этом кисти рук пловца направляются устройством строго по реальной траектории движения, учитывая ее вертикальные и горизонтальные
составляющие, и задается переменная нагрузка на каждую руку в динамике, соответствующей реальному плаванию со снятием нагрузки при проносе руки.
Траектория движения задается следующим образом. При движении руки вперед Б процессе ее проноса рукоятка 6 подается вперед, что влечет за собой перемещение рычага 5 в этом же направлении. В силу того, что палец 14 входит в переднее отверстие 11 кулисы, рычаг находится в застопо0 ренном положении по отношению к кулисе и поэтому кулиса перемещается вперед, скользя своей тормозной муфтой 12 по копиру 7. Сопротивление этому движению устройство не оказывает, так как толкатель 21 движется по холостой ветви 18 паза этого
5 копира. Впереди осуществляется ввод кисти руки в воду - ее заглубление. Это обеспечивается тем, что при подходе кулисы вперед ее палец 14 набегает на стопор 9, закрепленный на копире (впереди) и выдавливается им вверх, сжимая пружину 27, чем высвобождает подвижную часть 5 рычага 4, которая вместе с ним поворачивается на кулисе 10 вперед-вниз по передней части дуги направляющей 3, что обеспечивается помещенным в нее пальцем 28 (закрепленным на подвижной части рычага 4).
Таким образом, при вводе кисти в воду и при последующем начале гребка кисть руки перемещается по строго заданной траектории, не испытывая сопротивления тормоза (сопротивление незначительно).
0 Далее следует гребок: рука движется вниз-назад по требуемой (например, серпообразной) траектории с переменной нагрузкой.
После ввода кисти в воду подвижная часть 5 рычага 4 доходит до вертикального
5 положения рукояткой 6 книзу. Не доходя до этого положения, палец 14 входит в заднее отверстие 11 кулисы и фиксирует рычаг 4 на кулисе. Поэтому дальнейшее движение руки назад происходит уже совместно с движением кулисы. При этом кулиса движется не строго вертикально, а переходит из вертикального положения постепенно в наклонное и затем в конце гребка вновь возвращается в исходное положение. Рукоятка 6 при этом (и кисть руки) описывают требуеJ мую (серпообразную) траекторию, так как она находится ниже нижнего края кулисы. Это обеспечивается тем, что толкатель 21 переходит из холостой ветви 18 паза копира 7
5
0
в его рабочую ветвь 17 через их донную переднюю площадку 19 и движется по этой ветви.
Нагрузка изменяется по закону реального гребка потому, что дно ветви 17 паза переменно по глубине. В силу этого трение толкателя 21 о дно паза воспроизводит требуемый перепад нагрузки на каждой точке траектории движения кисти руки. Пружина 22 обеспечивает при этом плавность движения и перепад силы трения.
В конце гребка осуществляется вынос руки из воды (извлечение из воды). При этом нагрузка снимается и рука движется по восходящей части траектории, которая задается задней частью направляющей 3. Это происходит так. При подходе кулисы к крайнему заднему положению в конце гребка она вновь расстопоривается, ее рычаг 4 приобретает возможность вращения, а нагрузка снимается. Вынос руки из воды сразу же (непрерывно) переходит в пронос руки, т. е. к движению расслабленной руки вперед для очередного гребка.
Расстопоривание и последующая фиксация подвижной части 5 рычага 4 осуществляется так же, как показано при вводе кисти в воду, только тут вступает в работу стопор 9, укрепленный на задней части копира 7. Нагрузка снимается, так как при этом толкатель 21 переходит по задней донной переходной площадке 20 в холостую ветвь 18
0
5
0
бесконечного паза. Затем вновь следует ввод кисти в воду и т. д. Все процессы повторяются аналогичным образом, как правой, так и левой рукой.
Траектория движения изменяется еще и за счет колебательных движений поворотно установленных копиров 7. При гребке правой рукой правый копир движется вниз, а левый - вверх. Поскольку копиры расположены один к другому под углом (не параллельно), а ось 8 тоже наклонена в сторону основы, то и верхние, и нижние ветви траектории формируются не горизонтально, а наклонно, кроме того, по мере движения руки назад эти ветви (рабочая и холостая) расходятся тоже под определенным углом, что и требуется при реальных действиях пловца. Этим обеспечивается движение руки при гребке назад-вниз, а при заносе - вперед- вниз.
Колебание копиров 7 вокруг продольной оси 8 платформы 2 обеспечивается за счет щарнира 29, закрепленного на передней части рамы 1 и за счет щарнира передней части 15 платформы 2 (не обозначено).
Регулировка нагрузки осуществляется за счет сжатия или расслабления пружины 22 гайкой 24. Длина гребка регулируется путем перемещения и фиксации винтами 30 стопоров 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки пловцов-брассистов | 1985 |
|
SU1261678A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1600814A1 |
| Устройство для тренировки пловцов | 1989 |
|
SU1646560A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
| Устройство для тренировки пловцов | 1979 |
|
SU874081A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| ЭРГОМЕТР | 1990 |
|
RU2015684C1 |
| Устройство для обучения плаванию в бассейне | 1984 |
|
SU1258452A1 |
| Устройство для тренировки гребцов-байдарочников | 1982 |
|
SU1105207A1 |
| Устройство для тренировки гребцов | 1982 |
|
SU1069839A2 |

Фиг. 2
10
Фиг. 5
в
Фиг.6
Б V20
Фыг.8
2fi
21 тз
1
MAVW
Фиг.Э
Составитель Г. Царапов
Редактор В. ПетрашТехред И. ВересКорректор В. Синицкая
Заказ 5055/6Тираж 406Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Ф1/г.Ю
Фи.П
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ | 1991 |
|
RU2019224C1 |
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
