,Изобретение относится к автоматизации металлургического производства и может быть использовано для авто- мат11ческого регулирования натяжения между клетями пшрокополосного непрерывного стана горячей прокатки.
Цель изобретения - улучшение качества регулирования и уменьшения возможности создания аварийной ситуации при заходе полосы в межклетевой промежуток. .
На фйг.1 изображена блок-схема системы автоматического регулирования натяжения5 на фиг.2 - структурная схема блока расчета момента; на фиг.З - структурная схема блока управления.
Система автоматического регулирования натяжения полосы 1 (фиг.1) в межклетевом промежутке между i-и клетью и (1+1)-й клетью, содержит петледержатель 2 с приводом от двигателя 3 постоянного тока, датчик А тока, регулятор 5 момента, регулятор 6 конечных положений, блок 7 расчета момента, входы которого соединены с задатчиками (не показан) ширины 6; толщины И полосы и удельного натяжения 6 регулятор 8 петли, регулятор 9 скорости, датчик 10 угла подъема петледержателя, блок 11 управления, входы которого соединены с выходами датчиков наличия проката в (/-1)-й i -и и (1+1)-й клетях (не показаны), блок 12 двукратного интегрирования, информационный вход которого соедине с датчиком 4 тока, а управляющий - с блоком 11 управления, узел 13 ограничения, компаратор 14, первый вхо которого соединен с выходом блока 12 двукратного интегрирования, второй - через узел 13 ограничения - с датчиком 10 угла подъема петледержателя, а выход - с блоком 11 управления, выход датчика 10 угла подъема петледержателя / соединен с соответствующими входами регупятора 8 петли, узла 13 ограничения, регулятора 6 конечны положений и блока 7 расчета момента, другие входы которых соединены с соответствующими выходами блока 11 управления.
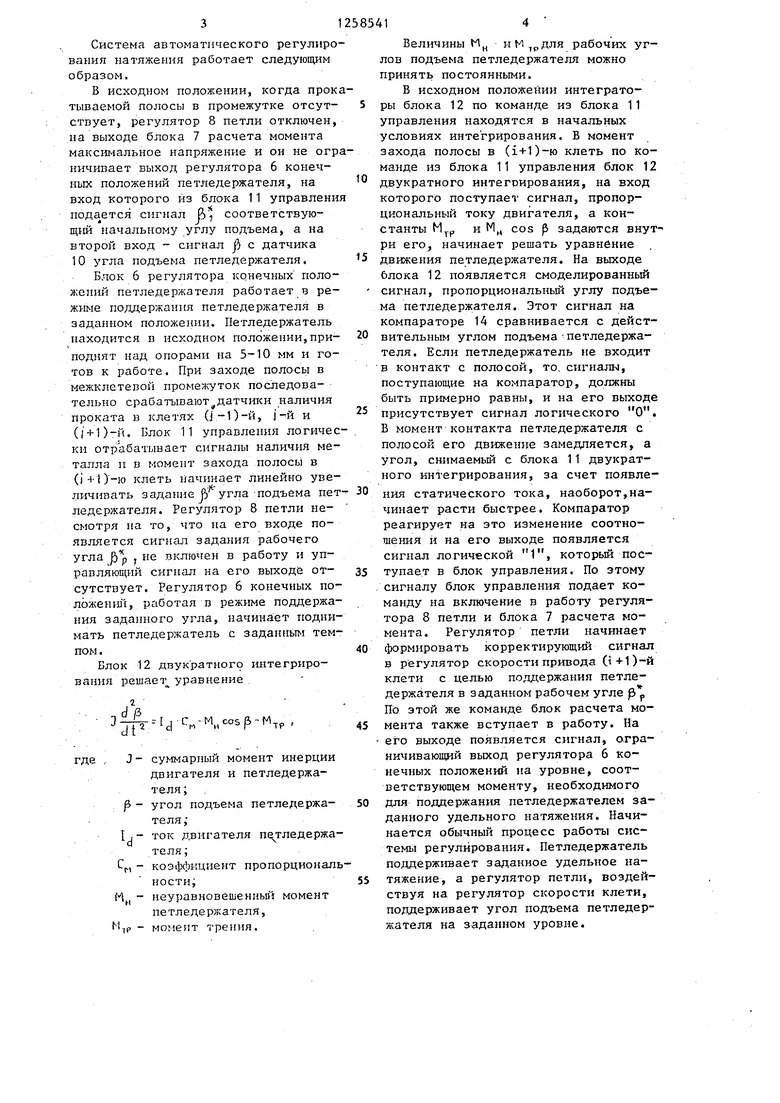
Блок расчета момента (фиг.2) содержит три умножителя 15-17, сумматор 18, два задатчика 19 и 20 и переключатель 21. На выходе 15 умножителя формируется сигнал, пропорциональный сечению и весу полосы в меж
S
0
5
0
5
0
5
0
5
клетевом промежутке, умножитель 16 вычисляет заданное натяжение.в полосе, а умножитель 17 формирует линеаризованную безразличную характеристику. Задатчиком 19 вводят значение неуравновешенного момента петледержателя. В сумматор 18 суммируются три составляющие, которые определяют Требуемый момент на двигателе петледержателя, а именно момент от веса полосы в промежутке, неуравновешенный момент петледержателя и составляющая, идущая непосредственно на создание натяжения. Сумма этих составляющих определяет момент двигателя петледержателя.
В исходном положении переключатель 21 подключает выход блока к задатчику 20, который определяет максимальный момент петледержателя, Таким образом, пока петледержатель не вошел в контакт с полосой, момент его ограничивается максимальным значением, что дает возможность регулятору 6 конечных положений при подъеме петледержателя из исходного положения для работы с темпом, определяемым заданием.
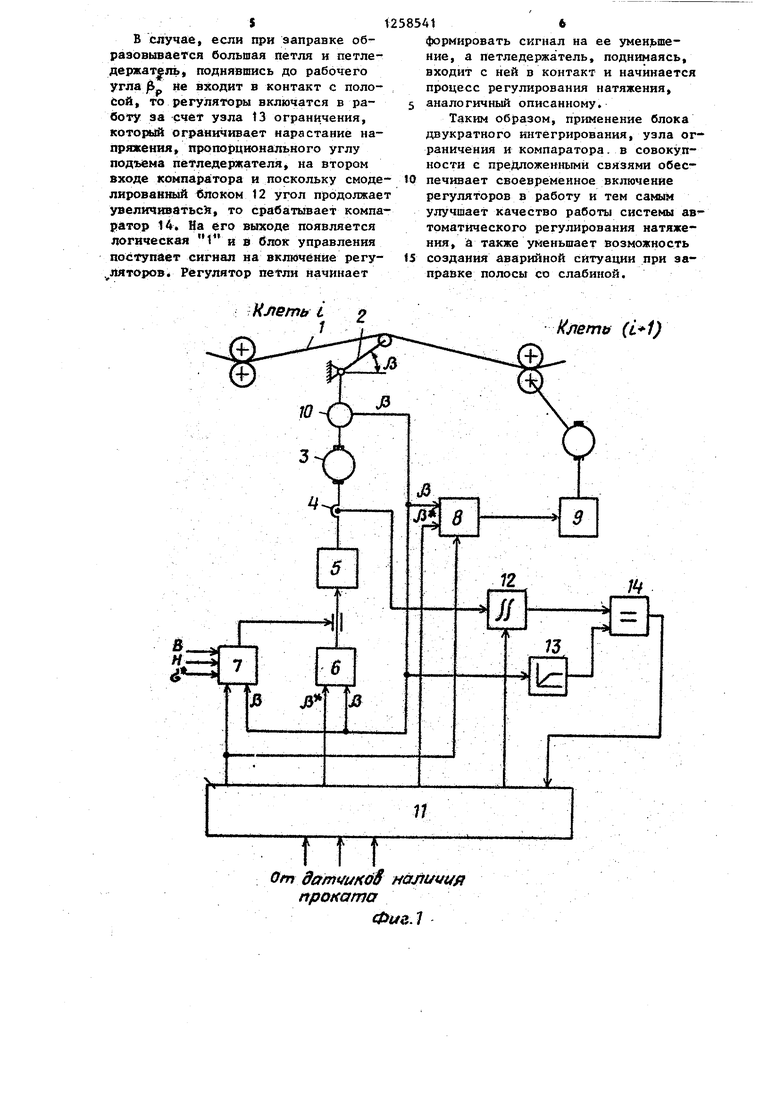
Блок 5 управления (фиг.З) содержит задатчики 22 и 23 максимального и рабочего углов подъема петледержателя, задатчик 24 интенсивности, ключ 25, элемент 2И-НЕ 26 иЛВ- триггер 27,
Блок работает следующим образом.
При заходе полосы в межклетевой промежуток срабатывают датчики наличия проката и на выходе элемента 26 появляется сигнал логического О. При этом подается команда па включение в работу блока 12, замыкается ключ 25, а триггер 27 остается в исходном состоянии. На выходе блока 11 появляется сигнал jjp, соответствующий рабочему углу подъема петледержателя, и сигнал |) нарастающий по линейному закону, которьш определяет задание блоку 6 на подъем петледержателя. В момент контакта с полосой из блока 14 сравнения поступает ло- гическая 1, которая переключает $ триггер 27 в единичное состояние. В регуляторы 8 и 9 петли и скорости поступает команда на включение их в работу в режиме регулирования межклетевого натяжения.
312
Система автоматического регулирования натяжения работает следующим образом,
В исходном положении, когда прокатываемой nojiocbi в промежутке отсут- ствует, регулятор 8 петли отключен, на выходе блока 7 расчета момента макст 1альное напряжение и он не ограничивает выход регулятора 6 конеч
ных положении петледержателя, на вход которого из блока 11 управлени сигнал & соответствующий начальному углу подъема, а на второй вход сигнал р с датчика 10 угла подъема петледержателя.
Блок 6 регулятора конечных поло- женин петледержателя работает в режиме поддержания петледержателя в заданном положении. Петледержатель находится в исходном положении,приподнят над опорами на 5-10 мм и готов к работе, При заходе полосы в межклетевои промежуток последовательно срабатьшают датчшш наличия проката в клетях 0-1)-й, )-й и (|+1)-й. Блок 11 управления логически отрабатывает сигналы наличия ме- тал7ла II в момент захода полосы в (i+i)-io клеть начинает линейно уве. .иличивать заданиеjb угла-подъема пет ледержателя. Регулятор 8 петли несмотря на то, что на его входе по- яв;и1ется сигнал задания рабочего угла | J не включен в работу и управляющий сигпал на его ВЫХОДЕ отсутствует. Регулятор 6 конечных по- лЬженш, работая и режиме поддеряса- ния заданного угла, начина;ет поднимать Петледержатель с заданным темпом .
Блок 12 двукратного интегрирования решает уравнение .
Тр-.
d- CHHH де , 3 - суммарный момент инерции двигателя и петледержателя;
- угол подъема петледержателя;
ток двиг ателя П(тледержа- теля;
коэффициент пропорциональности;
неуравновешениьп момент петледержателя, момент трения.
М,р 5
10
15
20
0
Величины М рабоч их углов подъема петледержателя можно принять постоянными.
Б исходном положении интеграторы блока 12 по команде из блока 11 управления находятся в начальных условиях интегрирования, В момент захода полосы в (1+1)-ю клеть по команде из блока 11 управления блок 12 двукратного интегрирования, на вход которого поступает сигнал, пропорциональный току двигателя, а константы М,.р
Мц COS р задаются внутри его, начинает решать уравнение движения петледержателя. На выходе блока 12 появляется смоделированный сигнал, пропорциональньш углу подъема петледержателя. Этот сигнал на компараторе 14 сравнивается с действительным углом подъемапетледержателя. Если Петледержатель не входит в контакт с полосой, то. сигналы, поступающие на компаратор, должны быть примерно равны, и на его выходе
5 присутствует сигнал логического О, В момент контакта петледержателя с полосой его движение замедляется, а угол, снимаемый с блока 11 двукратного интегрирования, за счет появления статического тока, наоборот,начинает расти быстрее, Компаратор реагирует на это изменение соотношения и на его выходе появляется сигпал логической 1, который пос5 тупает в блок управления. По этому сигналу блок управления подает команду на включение в работу регулятора В петли и блока 7 расчета момента. Регулятор петли начинает
0 формировать корректирующий сигнал в регулятор скорости привода (1-1-1)-й клети с целью поддержания петледержателя в заданном рабочем угле „ По этой же команде блок расчета мо-
5 мента также вступает в работу. На - его выходе появляется сигнал, ограничивающий выход регулятора 6 конечных положений на уровне, соответствующем моменту, необходимого
0 для поддержания петледержателем заданного удельного натяжения. Начинается обычный процесс работы системы регулирования. Петледержатель поддерживает заданное удельное иа5 тяжение, а регулятор петли, воздействуя на регулятор скорости клети, поддерживает угол подъема петледержателя на заданном уровне.
В случае, если при заправке об- разовьгаается большая петля и петле- держатель, поднявшись до рабочего угла „ не взсодит в контакт с поло- Сой, то регуляторы включатся в работу эа счет узла t3 ограничения, который ограничивает нарастание напряжения , пропорционально го углу подъема петледержателя, на втором входе компара:тора и поскольку смоделированный блоком 12 угол продолжает увеличиватьс), то срабатывает компаратор 14, На его выходе появляется логическая 1 и в блок управления поС-гупйет сигнал на включение регу- ляторов Регулятор петли начинает
формировать сигнал на ее умен,ьше- ние, а петледержатель, поднимаясь, входит с ней в контакт и начинается процесс регулирования натяжения, аналогичный описанному.
Таким образом, применение блока двукратного интегрирования, узла ог раничения и компаратора. в совокупности с предложенными связями обеспечивает своевременное включение регуляторов в работу и тем самый улучшает качество работы системы ав томатического регулирования натяжения, и также уменьшает возможность создания аварийной ситуации при заправке полосы со слабиной.
Нлеть
17
От dsrmt/uHof проката
Фи&.1
kjiemo ()
ВыхоЗ
Редактор О. Головач
Составитель А. Сергеев
Техред А.Кравчук Корректор С. Шекмар
Заказ 5061/10 Тираж 518 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035 Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,4
Фt4г.Z
Фиъ.З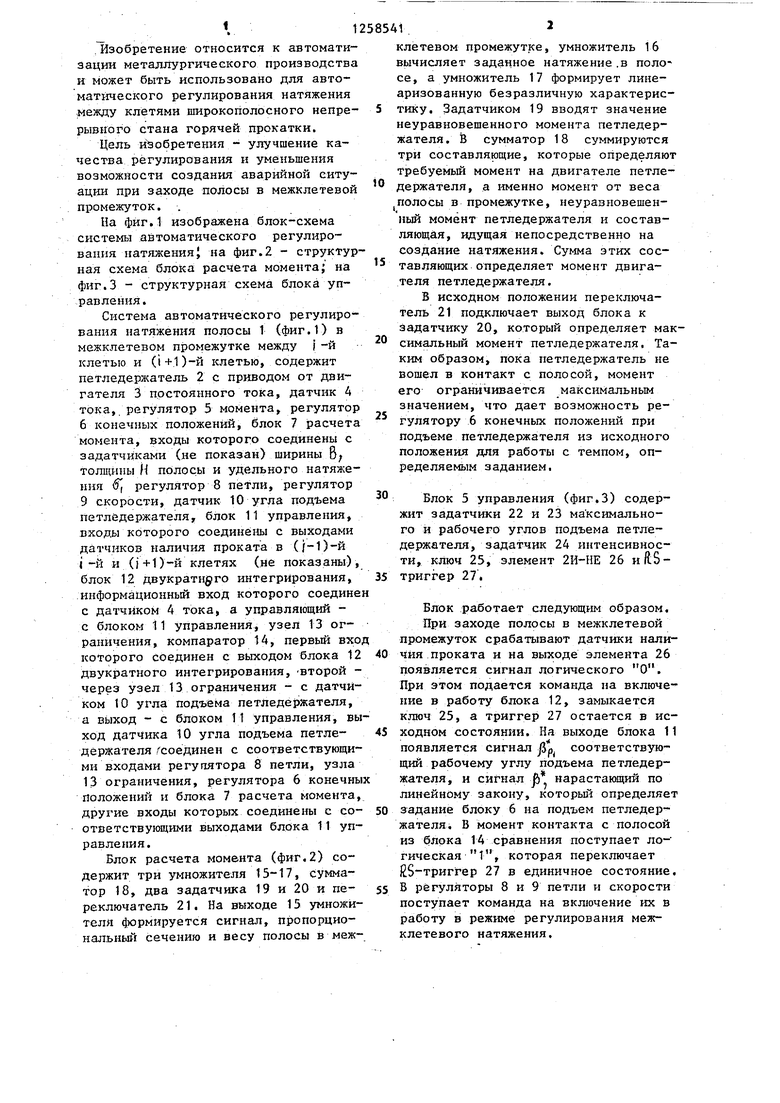
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ ПОЛОСЫ | 1999 |
|
RU2147951C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СКОРОСТЕЙ СМЕЖНЫХ КЛЕТЕЙ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ ПО ЗАДАННОМУ МЕЖКЛЕТЕВОМУ НАТЯЖЕНИЮ ПОЛОСЫ И ВЕЛИЧИНЕ ПЕТЛИ | 1998 |
|
RU2126304C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ДИНАМИЧЕСКОГО ТОКА ЭЛЕКТРОПРИВОДА ПЕТЛЕДЕРЖАТЕЛЯ | 1998 |
|
RU2136418C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2010 |
|
RU2446026C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕТЛЕДЕРЖАТЕЛЯ ПРИ ЗАПРАВКЕ ПОЛОСЫ В КЛЕТИ ЧИСТОВОЙ ГРУППЫ СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2016 |
|
RU2643157C1 |
| Устройство для автоматического регулирования натяжения полосы | 1977 |
|
SU692650A1 |
| Электропривод для петледержателя на непрерывном листовом стане горячей прокатки | 1982 |
|
SU1073869A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПРОКАТЫВАЕМОЙ ПОЛОСЫ В ПЕРВОМ МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ЧИСТОВОЙ ГРУППЫ СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2016 |
|
RU2646305C1 |
| Способ автоматического управления электроприводами петледержателей чистовой непрерывной группы клетей стана горячей прокатки | 1982 |
|
SU1041189A2 |
| Устройство для автоматического регулирования охлаждения полосы в чистовой группе стана горячей прокатки | 1983 |
|
SU1158268A1 |
| Автоматизированньй электропривод в народном хозяйстве | |||
| - М., Энергия, 1971, т.З, с | |||
| Прибор, автоматически записывающий пройденный путь | 1920 |
|
SU110A1 |
| Стефанович В.Л | |||
| Автоматизация непрерывных и полунепрерывных станов горячей прокатки | |||
| - М.: Метал- , 1975, с | |||
| Способ получения нерастворимых лаков основных красителей в субстанции и на волокнах | 1923 |
|
SU132A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
