Изобретение относится к электротехнике и может быть использовано для управления электроприводом петледержателя системы автоматического управления скоростью и натяжением полосы на непрерывных станах горячей прокатки.
Известен способ управления электроприводом петледержателя прокатного стана [1], при котором измеряют угол подъема петледержателя, формируют заданный момент электродвигателя путем суммирования сигналов, пропорциональных натяжению полосы, массе полосы и неуравновешанным частям механизма петледержателя и изменяющихся в функции угла подъема петледержателя, формируют задание на дополнительный момент для форсированного подъема петледержателя, фиксируют момент достижения углом подъема петледержателя заданного значения, снимают задание на дополнительный момент.
При этом при угле подъема α менее заданного рабочего α*раб и контакте ролика петледержателя с полосой петледержатель поднимается с ускорением, определяемым выражением:

где М*(α) - заданный момент на валу электродвигателя петледержателя, определяемый из условия поддержания постоянства межклетевого натяжения;
Мс(α) - момент нагрузки (статический момент) на валу электропривода петледержателя, Jпд - суммарный момент инерции механизма петледержателя; Мдоп - дополнительный момент для форсировки подъема петледержателя.
По вышеизложенному способу форсировка снимается (Мдоп=0 Нм) при α≥α*раб. И при фактическом угле петледержателя α≥α*раб электропривод движется с ускорением:

При этом, при точном расчете заданного момента, он будет равен фактической нагрузке М*(α)=Мс(α) и петледержатель придет в равновесное состояние покоя.
Данное техническое решение обеспечивает форсированный подъем петледержателя в рабочее положение, однако оно не исключает образования «свободной петли» при ошибке расчета соотношения заправочных скоростей соседних прокатных клетей системой начальной настройки чистовой группы при заправке полосы в клети стана горячей прокатки. При такой ситуации, при большой образовавшейся петле металла в межклетевом промежутке, при отсутствии контакта ролика петледержателя с полосой Мс(α)=0, петледержатель, двигаясь с ускорением  , может не успеть «догнать» полосу, но при этом, достигнув рабочего угла α*раб, снизит ускорение до значения
, может не успеть «догнать» полосу, но при этом, достигнув рабочего угла α*раб, снизит ускорение до значения  . Вследствие этого быстродействия петледержателя для скорейшего замыкания контура регулирования петли может не хватить, что приведет к аварийной ситуации.
. Вследствие этого быстродействия петледержателя для скорейшего замыкания контура регулирования петли может не хватить, что приведет к аварийной ситуации.
Наиболее близким техническим решением к изобретению является способ управления [2], при котором измеряют угол подъема петледержателя, формируют заданный момент электродвигателя путем суммирования сигналов, пропорциональных натяжению полосы, массе полосы и неуравновешанным частям механизма петледержателя и изменяющихся в функции угла подъема петледержателя, формируют задание на дополнительный момент для форсированного подъема петледержателя, фиксируют момент достижения углом подъема петледержателя заданного значения, снимают задание на дополнительный момент, но с целью повышения надежности и быстродействия перед снятием задания на дополнительный момент устанавливают факт наличия статической нагрузки на ролике петледержателя, используя встроенный в ролик датчик статической нагрузки.
Недостатком данного технического решения является то, что для определения факта наличия контакта ролика петледержателя с полосой применяется специализированный датчик статической нагрузки, что усложняет конструкцию самого петледержателя, требует затрат на обслуживание датчика.
Целью изобретения является повышение быстродействия электропривода во всем диапазоне изменения высоты подъема петледержателя и тем самым снижение вероятности аварийной ситуации при заправке полосы в клети чистовой группы стана горячей прокатки.
Поставленная цель достигается тем, что измеряют угол подъема петледержателя, формируют заданный момент электродвигателя путем суммирования сигналов, пропорциональных натяжению полосы, массе полосы и неуравновешанных частей механизма петледержателя и изменяющихся в функции угла подъема петледержателя, формируют задание на дополнительный момент для форсированного подъема петледержателя, фиксируют момент достижения углом подъема петледержателя заданного значения, снимают задание на дополнительный момент, перед снятием задания на дополнительный момент устанавливают факт наличия статической нагрузки на ролике петледержателя (контакт ролика петледержателя с прокатываемой полосой), а факт наличия статической нагрузки на ролике петледержателя определяют по изменению ускорения подъема педледержателя, вычисляя его как двойную производную по времени сигнала датчика угла поворота петледержателя и сравнивая полученное значение фактического ускорения с расчетным значением. Равенство указанных величин является дополнительным условием для снятия задания на дополнительный момент.
Согласно предлагаемому способу факт наличия статической нагрузки на ролик петледержателя (факт контакта ролика с полосой) определяют следующим образом. Вычисляют фактическое ускорение петледержателя при подъеме, используя сигнал с датчика угла поворота. Т.е. ускорение будет равно  (операция двойного дифференцирования переменной фактического угла поворота), и сравнивают его со значением ускорения, определяемого по выражению
(операция двойного дифференцирования переменной фактического угла поворота), и сравнивают его со значением ускорения, определяемого по выражению  . Т.е., при отсутствии контакта ролика с полосой Мс(α)=0 петледержатель двигается с ускорением
. Т.е., при отсутствии контакта ролика с полосой Мс(α)=0 петледержатель двигается с ускорением  , после контакта ролика с полосой и появления на ролике статической нагрузки М*(α)=Мс(α) петледержатель будет продолжать двигаться с ускорением
, после контакта ролика с полосой и появления на ролике статической нагрузки М*(α)=Мс(α) петледержатель будет продолжать двигаться с ускорением  . Это значит, что при наличии контакта ролика с полосой и точном расчете значения заданного момента электропривода М*(α), соответствующего моменту нагрузки Мс(α), петледержатель продолжит движение с ускорением, определяемым составляющей дополнительного момента.
. Это значит, что при наличии контакта ролика с полосой и точном расчете значения заданного момента электропривода М*(α), соответствующего моменту нагрузки Мс(α), петледержатель продолжит движение с ускорением, определяемым составляющей дополнительного момента.
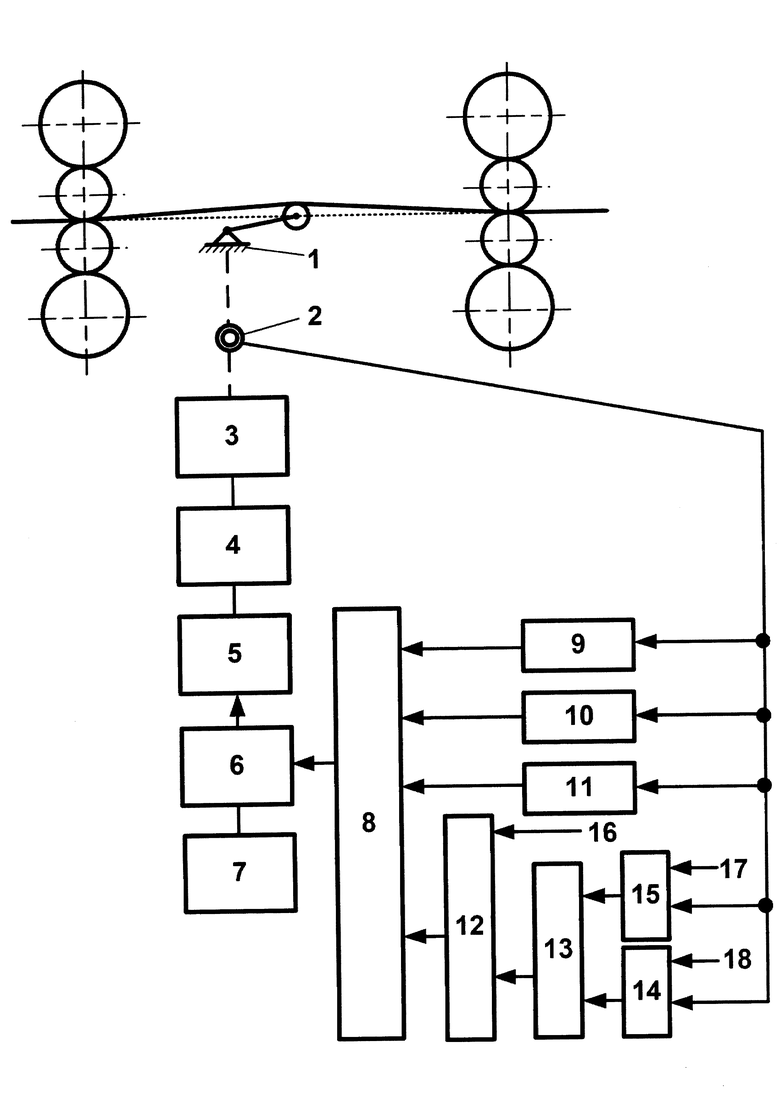
На чертеже приведена принципиальная схема устройства, реализующего предлагаемый способ.
Устройство содержит петледержатель 1, с валом которого соединен датчик 2 угла поворота. К приводному двигателю 3 петледержателя присоединен тиристорный преобразователь 4, входом соединенный с выходом регулятора тока 5, вход которого подключен к выходу блока ограничения 6 сигнала регулятора скорости 7. Выход регулятора скорости 7 подсоединен к первому входу блока ограничения 6. Второй вход блока ограничения 6 соединен с выходом сумматора 8. Входы сумматора 8 соединены с выходами функциональных преобразователей 9-11, предназначенных для формирования составляющих ограничения задания на ток, определяемых заданным натяжением полосы, массой полосы, неуравновешанной массой механизма петледержателя. Входы преобразователей 9-11 соединены с выходом датчика 2 угла поворота. Кроме этого, устройство содержит блок 12 формирования дополнительной составляющей момента электропривода петледержателя в масштабе ограничения задания на ток. Выход блока 12 присоединен ко входу сумматора 8. На первый вход блока 12 подают значение дополнительной составляющей момента 16, на второй вход подают логический сигнал с выхода блока «И» 13. На первый вход блока 13 подключен выход блока формирования логического сигнала признака достижения петледержателем рабочего угла 15, на второй вход блока 13 подключен выход блока 14. Блок 14 формирует на своем выходе логический сигнал признака наличия статической нагрузки на валу ролика петледержателя. На первый вход блока 14 подают уставку 18 значения ускорения, определяемую дополнительной составляющей момента Мдоп/Jпд, второй вход блока 14 подключен к выходу датчика угла поворота петледержателя 2. На первый вход блока 15 подают уставку заданного рабочего угла петледержателя 17, второй вход блока 15 подключен к выходу датчика угла поворота петледержателя 2.
Устройство, реализующее данный способ, работает следующим образом.
С помощью датчика 2 измеряют угол подъема петледержателя 1. Блок 14 производит вычисление ускорения по сигналу измеренного угла подъема петледержателя и сравнивает его полученное значение с уставкой, равной Мдоп/Jпд, подаваемой на вход 18. Если расчетное ускорение больше значения уставки, то на своем выходе блок 14 формирует логический сигнал «0», если рассчитанное значение ускорение менее или равно значению уставки, то блок 14 формирует на своем выходе логический сигнал «1», тем самым устанавливается факт наличия статической нагрузки на ролике петледержателя и, соответственно, факт контакта ролика с полосой. Блок 15 сравнивает измеренный угол с фиксированной уставкой (значение заданного рабочего угла), которую подают на вход 17. Если измеренный фактический угла больше или равен уставке, то блок 15 формирует на своем выходе логический сигнал «1», в противном случае на выходе блока 15 - логический «0».
При команде на подъем петледержателя регулятор скорости 7 сразу переходит в режим «насыщения» и выдает на своем выходе максимально возможный сигнал, его величина ограничивается блоком 6, выход которого является заданием на ток электродвигателя 3 с тиристорным преобразователем 4, подаваемый на вход регулятора тока 5. Величина ограничения блоком 6 сигнала регулятора 7 определяется сигналом сумматора 8, который является суммой выходных сигналов блоков 9-12. Блоки функциональных преобразователей 9-11 формируют сигналы составляющих момента петледержателя от натяжения, веса полосы и веса неуравновешанных масс петледержателя в масштабе задания на ток, используя для расчетов сигнал датчика 2. Блок 12 передает на сумматор сигнал составляющей дополнительного задания на ток 16 в зависимости от логического сигнала на выходе блока 13 "И". При состоянии логического «0» на выходе блока 13 на сумматор 8 блок 12 передает сигнал дополнительной составляющей задания на ток 16, при состоянии логического «1» на выходе блока 13 на сумматор 8 передается нулевое значение дополнительной составляющей задания на ток, тем самым обеспечивая снятие дополнительного момента, развиваемого петледержателем при событии, когда петледержатель поднялся на заданный угол и произошел контакт его ролика с полосой. До наступления указанного события электропривод петледержателя развивает вращающий момент, включающий дополнительную составляющую, что обеспечивает его форсированный подъем.
Предлагаемый способ позволяет повысить быстродействие электропривода, произведя скорейшее замыкание контура регулирования петли, путем быстрого обеспечения контакта ролика петледержателя с полосой и тем самым исключить аварийные ситуации при заправке полосы. При этом данный способ исключает применение специализированных датчиков для определения контакта ролика петледержателя с прокатываемой полосой.
Источники информации
1. Патент ФРГ №1236637, кл. G05D 3/06 1962.
2. Патент №1094125 на изобретение, SU, Н02Р 5/06. Способ управления электроприводом петледержателя прокатного стана/ М.Я. Пистрак, М.И. Лапидус, В.А. Наумов, В.Г. Рогинский, П.С. Гринчук и Б.Т. Горбулинский - №3548678/24-07; заявл. 08.02.1983; опубл. 23.05.1984, Бюл. №19.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПРОКАТЫВАЕМОЙ ПОЛОСЫ В ПЕРВОМ МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ЧИСТОВОЙ ГРУППЫ СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2016 |
|
RU2646305C1 |
| Электропривод для петледержателя на непрерывном листовом стане горячей прокатки | 1982 |
|
SU1073869A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ДИНАМИЧЕСКОГО ТОКА ЭЛЕКТРОПРИВОДА ПЕТЛЕДЕРЖАТЕЛЯ | 1998 |
|
RU2136418C1 |
| Петледержатель для непрерывного стана горячей прокатки | 1979 |
|
SU854480A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МЕЖКЛЕТЕВОГО НАТЯЖЕНИЯ ПОЛОСЫ | 1999 |
|
RU2147951C1 |
| Способ автоматического регулирования натяжения полосы в межклетевом промежутке прокатного стана | 1976 |
|
SU662177A1 |
| ЮЭИАЯ В. М. Котов и Г. Е. Люльки-.,-.- ^ :. ..':^Институт автоматики | 1970 |
|
SU279551A1 |
| Устройство для управления моментным электроприводом постоянного тока,преимущественно электроприводом петледержателя системы автоматического регулирования натяжения полосы на непрерывном листовом стане горячей прокатки | 1981 |
|
SU970616A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2010 |
|
RU2446026C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СКОРОСТЕЙ СМЕЖНЫХ КЛЕТЕЙ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ ПО ЗАДАННОМУ МЕЖКЛЕТЕВОМУ НАТЯЖЕНИЮ ПОЛОСЫ И ВЕЛИЧИНЕ ПЕТЛИ | 1998 |
|
RU2126304C1 |
Изобретение относится к области электротехники и может быть использовано для управления электроприводом петледержателя системы автоматического управления скоростью и натяжением полосы на непрерывных станах горячей прокатки. Технический результат - повышение быстродействия электропривода во всем диапазоне изменения высоты подъема петледержателя и тем самым снижение вероятности аварийной ситуации при заправке полосы в клети чистовой группы стана горячей прокатки. В способе управления электроприводом петледержателя при заправке полосы в клети чистовой группы стана горячей прокатки факт наличия статической нагрузки на ролике петледержателя при его первоначальном подъеме, а следовательно, и факт контакта ролика с полосой определяют по изменению ускорения движения рамы петледержателя, сравнивая его с расчетным. 1 ил.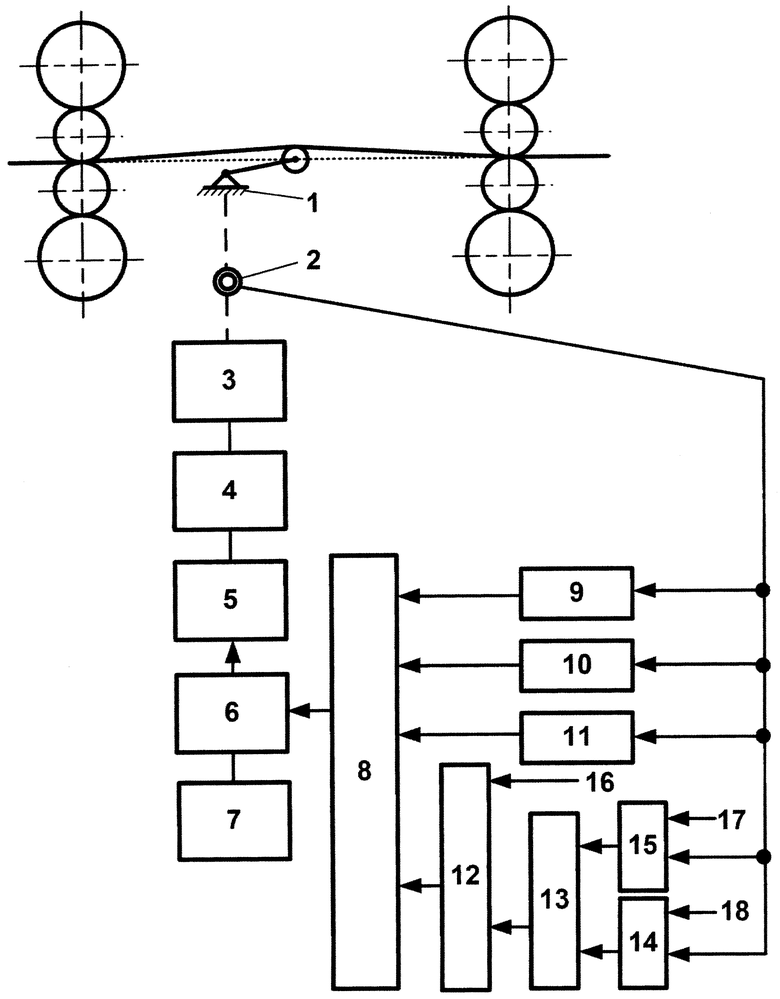
Способ управления электроприводом петледержателя первого межклетевого промежутка чистовой группы стана горячей прокатки, при котором измеряют угол подъема петледержателя, формируют заданный момент электродвигателя путем суммирования сигналов, пропорциональных натяжению полосы, массе полосы и неуравновешанных частей механизма петледержателя и изменяющихся в функции угла подъема петледержателя, формируют задание на дополнительный момент для форсированного подъема петледержателя, фиксируют момент достижения углом подъема петледержателя заданного значения, снимают задание на дополнительный момент, перед снятием задания на дополнительный момент устанавливают факт наличия статической нагрузки на ролике петледержателя (контакт ролика петледержателя с прокатываемой полосой), отличающийся тем, что факт наличия статической нагрузки на ролике петледержателя определяют по изменению ускорения подъема педледержателя, вычисляя его как двойную производную по времени сигнала датчика угла поворота петледержателя, сравнивают полученное значение фактического ускорения с расчетным значением, и равенство указанных величин является дополнительным условием для снятия задания на дополнительный момент.
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ НАТЯЖЕНИЯ ПОЛОСЫ В МЕЖКЛЕТЕВОМ ПРОМЕЖУТКЕ ШИРОКОПОЛОСНОГО СТАНА ГОРЯЧЕЙ ПРОКАТКИ | 2010 |
|
RU2446026C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ДИНАМИЧЕСКОГО ТОКА ЭЛЕКТРОПРИВОДА ПЕТЛЕДЕРЖАТЕЛЯ | 1998 |
|
RU2136418C1 |
| Способ управления электроприводом петледержателя прокатного стана | 1983 |
|
SU1094125A1 |
| Устройство для крепления путевого датчика | 1987 |
|
SU1477610A1 |
| DE 1236637 B, 16.03.1967 | |||
| US 6205829 B1, 27.03.2001 | |||
| Форма для заливки катушек трансформаторов | 1972 |
|
SU455381A1 |

